



机器人仿形试教时,一般会用到关节、直角(圆柱)、工具、用户坐标系,按试教盘坐标键,每按一次此键,坐标系按关节、直角(圆柱)、工具用户坐标顺序变化,通过状态区的显示来确认。
实现不同功能的机器人采用的仿形试教方式不一样,EPX-2900六轴伺服防爆机器人仿形试教时通常采用直角坐标插补、关节坐标插补方式。
直角坐标系规定,不论机器人处于什么位置,机器人均可沿着设定的X、Y、Z轴平行移动(工具坐标和用户坐标与直角坐标运动原理相同),在选择直角坐标系时机器人运动方式见表6-13。
表6-3 直角坐标系的轴动作
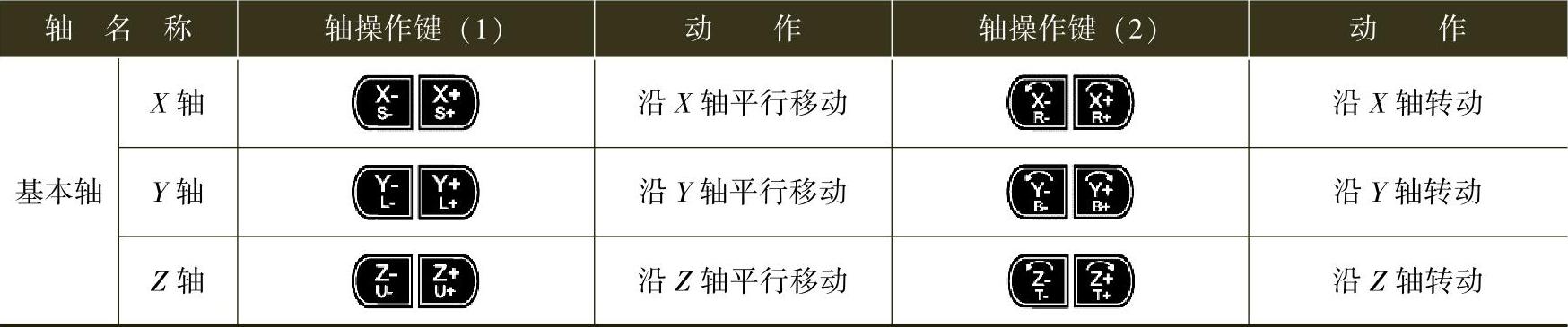
关节坐标系,机器人各轴单独动作,称为关节坐标系,关节坐标系下机器人运动方式见表6-14。
表6-14 关节坐标系轴动作

通过表6-13和表6-14对比可以得到两个结论:(https://www.xing528.com)
1)选择直角坐标系,机器人从一个指定点移动到另一个指定点的运动是六轴联动,机器人绕着某一个轴旋转时也是六轴联动,六个轴的运动相互关联不可分割。
2)选择关节坐标系,机器人从一个点移动到另一个点时各个轴之间不存在必然联系,各个轴控制电动机只要接收到移动到下一点的指令,各轴之间完全独立地向下一个点移动。
在实际仿形试教时常遇到这样问题:如果图6-20所示左侧机器人试教位置需要过渡到图6-21左侧机器人试教位置,在直角、用户、工具坐标系下我们很难做到自然过渡。因为机器人在自动运动状态下各轴相互关联,因此相对运动速度较高,从一个造型面以2~3个试教点大跨度地过渡到另一个造型面,各个电动机间来不及数据的计算,因此会产生各轴运动干涉报警,无法应用到实际试教中来。
在上述情况下,便可以采用关节坐标系解决发生的问题。关节坐标系下各轴运动相对独立,没有相互干涉,当机器人TCP点从一点移动到另一点时,各轴伺服电动机独立计算移动点并导引各轴独自运动,减少了干涉发生,从而使试教工作顺利进行。
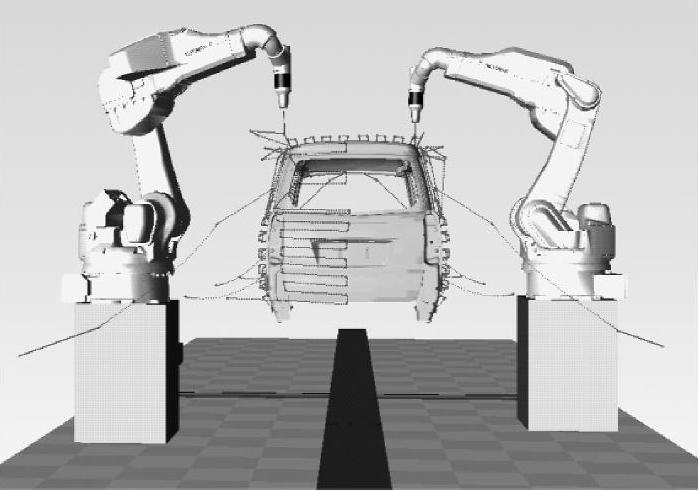
图6-20 顶喷
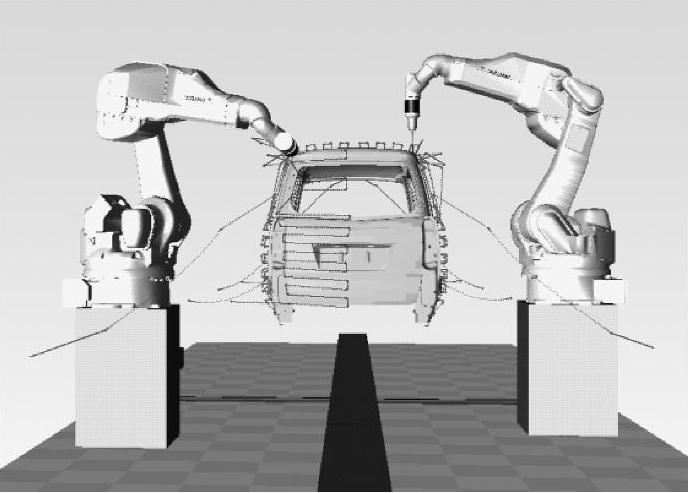
图6-21 背喷
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。