



STP点和CTP点对于初学者来说,是难理解的概念,STP(Synchronization start position)是同步的起始位置,CTP(convyer teaching point)是试教中心点(相对双链)。这两者之间既存在联系,又相互独立,因此,很多初学者在做仿形试教时总是处理不好两者之间的关系,总想要保证STP点值与CTP点值相同,为此付出了很多不存在任何价值的劳动。
STP点是保证喷涂工件和承载的载体同时运动,两者之间存在等同关系。由此可知,如果设置STP点和工件运动速度一致时,喷涂机器人便可以完成工件表面的所有喷涂动作。CTP点是试教中心点,是喷枪中心点与工件上某一点对应的点,只要保证喷枪与工件表面有点接触,那么,试教位置便能确定。
编程有两种方式:一种方式是现场编程,通常的做法是把工件实际导入到工作现场,首先设置好试教轨迹,然后在工件表面贴试教轨迹条,仿形试教工程师手持编程器按设置程序沿着工件外表面做合理运动完成最终编程(图6-18);另一种方式是采用仿形试教软件编程,编程人员把工件导入编程软件(导入比例为实际工件尺寸/导入工件尺寸=1000/1),采用软件完成离线编程(图6-19);并模拟运行。

图6-18 现场编程
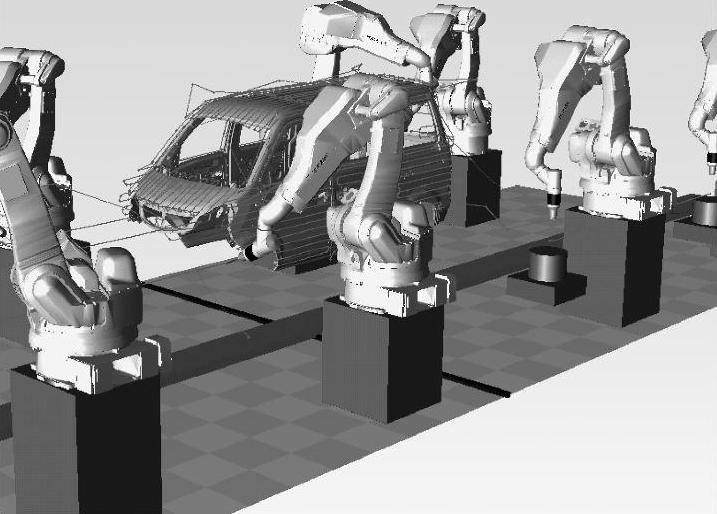
图6-19 采用仿形软件编程
这两种方式所做出来的程序STP点和CTP点始终都是相同的,如设置STP等于1000,那么CTP也等于1000,因此,给初学者造成的印象是STP点值和CTP点是相同的。如果发现现场程序中STP点和CTP点值不相同,则千方百计地把两者值设置一样,唯恐错误。(https://www.xing528.com)
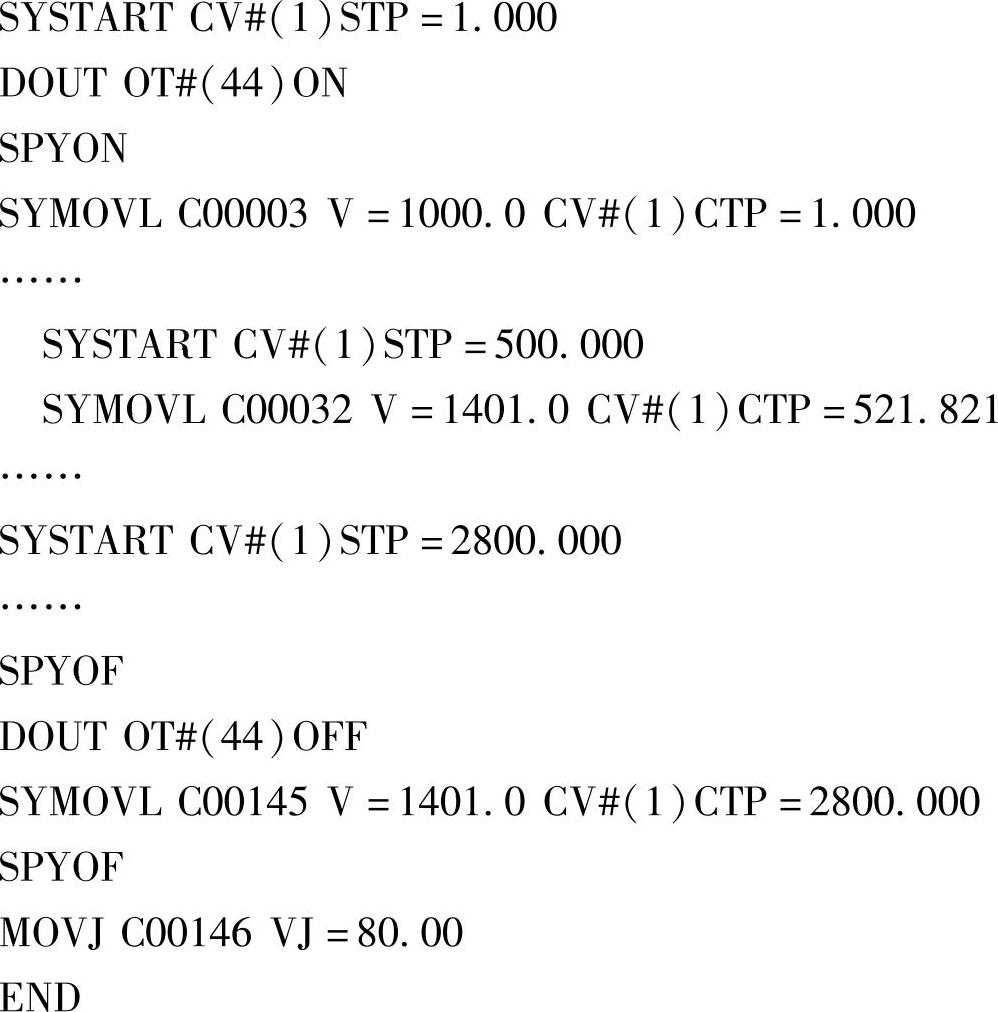
实际编程时采用两种方式混合使用,既采用编程软件试教方式,又采用现场试教方式,因此,两者是不可能保持相同的。EPX-2900型机器人是六轴机器人,其底座体积庞大,工作半径相对较小,因此,在程序设置时,无法采用一个STP点完成工件所有面的喷涂工作,在程序设置时,我们会设置多个STP点保证工件喷涂工作的完成,以下是笔者编写的某工件编喷涂程序:
为了完成某工件的喷涂动作,我采用了多个STP点,把工件在承载体上区分为多个区域,当工件运行到所设置的区域之后,机器人便开始工作,在该区域内完成所设定的喷涂动作。
程序中显示STP等于500时,CTP等于521.821,这种情况是合理的,先用试教软件做完程序,然后在现场实际工件模拟运行,并作修改。因为操作人员控制工件载体运行的双链PLC程序无法做到MM误差,因此,会出现实际位置CTP等于521.821与设置位置STP等于500不同的情况。
当然,我们控制的某一区域的CTP值一定要大于STP值,在多个STP值区分工作区域后,程序各步会相互干涉。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。