



在机器人安装、本体调试完成以后,在外界条件(喷漆室参数、油漆参数、输送装置、烘房等)具备的条件下,就可以进行车型的颜色调试了,车型的颜色调试主要分为机器人仿形的编制及车身工艺调试(主要为色差、橘皮、膜厚等),下面将分别作简要介绍。
1.机器人仿形的编制
随着计算机软件技术的高速发展,目前喷涂机器人仿形编制的大部分工作都离线进行,例如一汽轿车公司二工厂所用的ABB机器人离线编程软件主要为Shop Floor Editor和Robot Studio,下面将分别作简要介绍。
(1)Shop Floor Editor软件O Shop Floor Editor由于其具有坐标点移动、调整方便的特点,所以路径的编辑工作大部分在Shop Floor Editor上进行;Shop Floor Editor编辑界面如图3-18所示,导入调整好的需要编制仿形的车型文件(只能为“wrl”格式)后,用语句与三维视图相结合的方式编制车型仿形并直观调整各个点的角度。
(2)Robot Studio软件O Robot Studio软件可以根据现场机器人实际的安装位置及系统设置,实际模拟机器人喷涂运动,而使调试人员对机器人实际运行状态(两机器人之间的距离、机器人与墙壁之间的距离等)有直观了解,进而对机器人轨迹的通过性能作出直观的判断,进一步减少了现场实际两机器人之间以及机器人与墙壁之间由于碰撞而损坏的风险。但有一点值得说明,离线模拟只能降低碰撞的风险,而实际机器人运动状态与模拟状态还会有一定的差异,机器人手臂较长,如果喷漆室宽度不足(小于5m),碰撞现象发生的可能性还是非常大的。
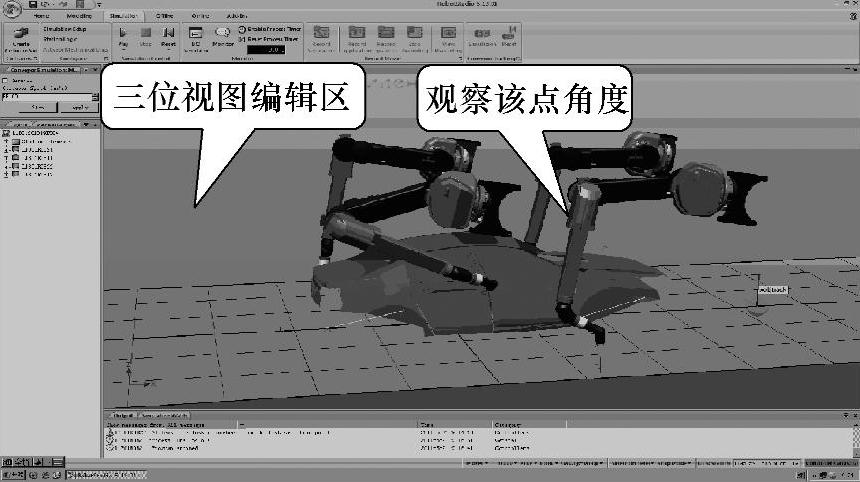
Robot Studio创建的机器人工作站如图3-19所示,将提前用Shop Floor Editor编制好的仿形导入工作站后,便可进行离线模拟验证,并对动作过大或不能通过的点用Shop Floor Editor进行修改,然后再次验证,直至满意为止。
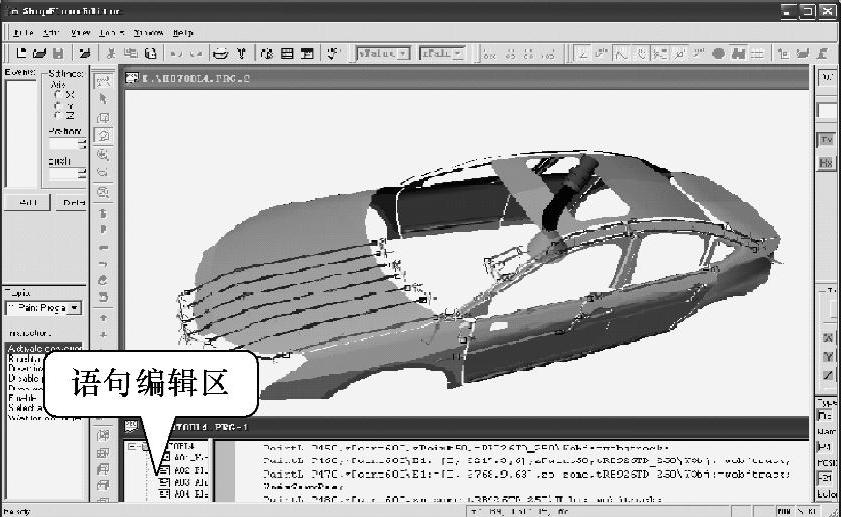
图3-18 Shop Floor Editor软件编辑区域
 (https://www.xing528.com)
(https://www.xing528.com)
图3-19 Robot Studio软件离线模拟
2.车身工艺调试
离线仿形通过以后,便可将仿形程序传到现场机器人当中,不带车模拟通过后,便可以进行喷涂工艺的调试工作了。车身喷涂工艺主要包括色差、橘皮、膜厚等,进入工艺调试阶段后,可根据油漆参数(固体分、粘度等)、先期测得的机器人喷幅及路径分区,编制喷涂参数表,并导入机器人当中,进而进行喷车实验。一种新颜色的调试流程如图3-20所示。
(1)贴板膜厚调试O无论机器人仿形编制如何细腻,喷涂参数设定如何精准,在首次喷涂时,调试人员也很难保证膜厚的均匀性。为了降低调试成本,减少调试过程中车身需求量,膜厚均匀性调试可按车身包铝箔纸后贴马口铁板的方式进行。当车身各个主要部位马口铁板膜厚均在要求范围内后,再根据实际情况进行其他调试工作(中涂、罩光调试进行整车膜厚验证,面漆颜色调试进行贴板色差验证)。
(2)贴板色差调试 与贴板膜厚调试一样,在一种新颜色调试初期,为了节约成本,亦可以先进行包铝箔贴板(中涂板)色差验证,直至各个试验板色差均在工艺要求范围内后,进行整车喷涂色差验证。
(3)局部调整优化 当整车膜厚、色差调试完成以后,可根据实际生产过程当中产生的缺陷(流挂、少漆、针孔等),对车身个别点进行微调、优化,以使车身表面达到更好的状态。
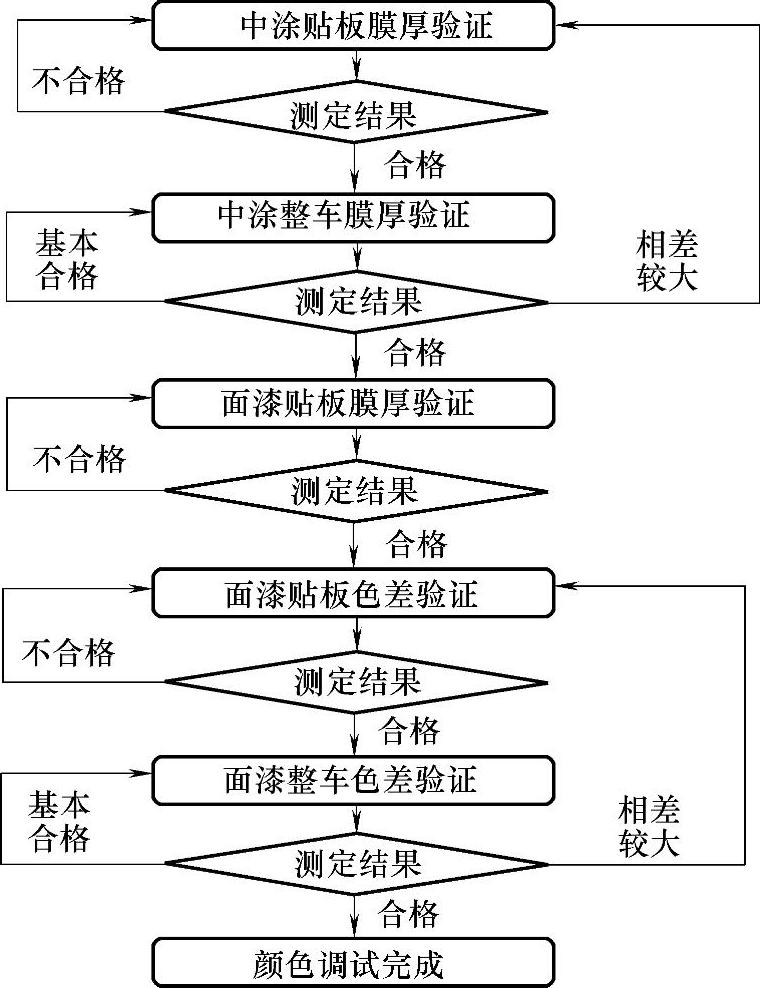
图3-20 一种新颜色的调试流程
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。