



喷涂机器人在硬件及系统安装完毕以后,将对机器人本体的一些参数进行测试及调整,按顺序主要包括机器人基坐标系零点的偏移、机器人微阀的测试、机器人各个机械轴零点的标定、机器人齿轮泵的标定、机器人喷幅测试等,下面将针对以上部分分别作以简要介绍。
1.机器人基坐标系零点的偏移
喷涂机器人默认的基坐标系零点位置一般是以机器人为基本参照物进行定义的,如ABB机器人基坐标系在一轴中心点,如图3-13所示,为了方便后期机器人仿形的编制,尤其是相同位置左右仿形可通过“镜像”功能达到通用的目的,在机器人安装后需把基坐标系的原点偏移到滑橇某个特殊的点上。一般情况下Y轴选择滑橇中心位置为零点,Z轴选择滑橇某个支点或者大地平面作为零点,X轴坐标通常不需进行修改。喷涂机器人(以ABB机器人为例)基坐标系零点偏移过程大概如下:
1)在机器人末端安装TCP并设定其长度为250mm。
2)将机器人TCP端点移至某一特殊位置(修改后Y轴、Z轴坐标为零位置),并记录Y轴、Z轴的坐标。
3)读取Y轴、Z轴的数据后,将计算机连接至机器人控制器,添加控制器,输入机器人IP地址,依次选择配置→motion→robot,将出现图3-14所示对话框,将Y、Z轴数据录入后热启动机器人即可,机器人X轴的数据不变。
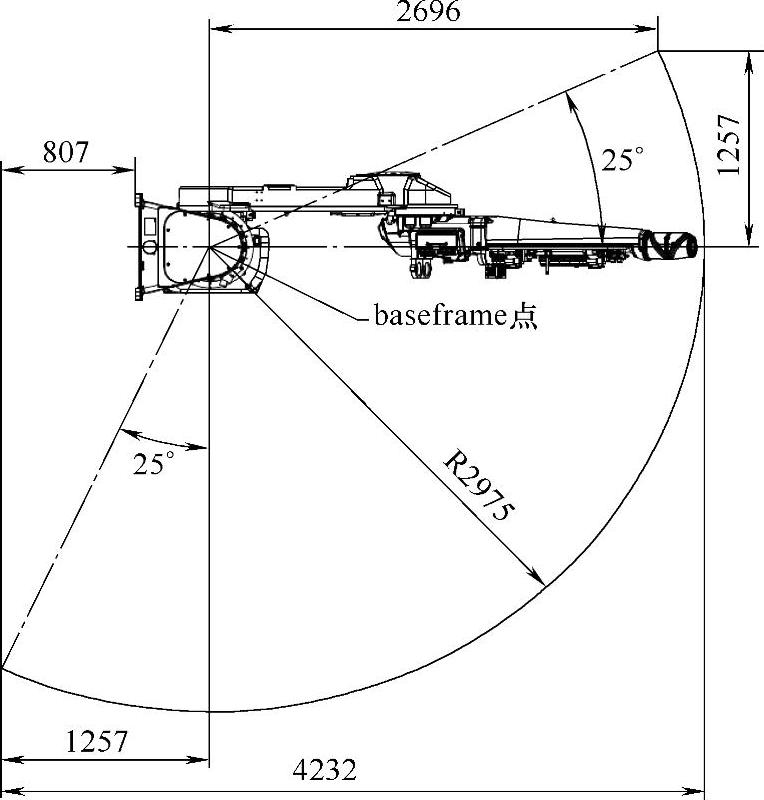
图3-13 机器人默认基坐标系零点位置
2.机器人微阀的测试
对于新建的生产线来说,所有的设备零件均为出厂后首次使用,无论厂家的信誉好坏,都存在零部件不能正常工作的可能性,而机器人微阀是否工作,直接影响到后期的喷车质量,甚至导致不出漆或混色现象的发生,因此,在机器人安装后须对机器人进行微阀的测试。具体步骤如下:
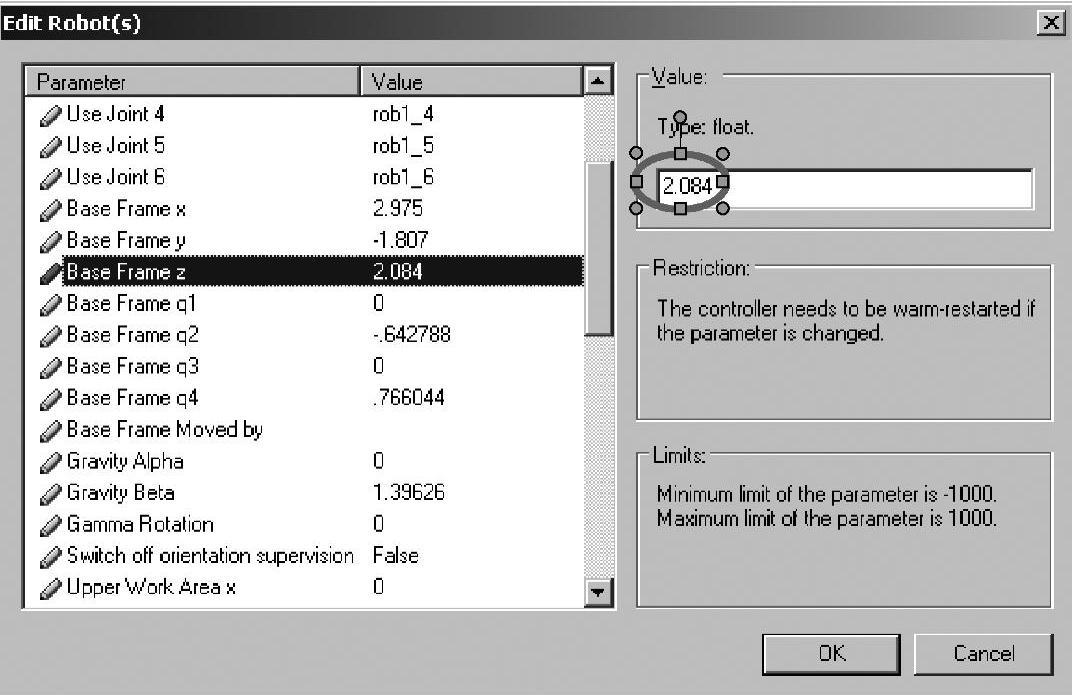
图3-14 机器人基坐标系零点偏移修改界面
1)离线用Shop Floor Editor等程序编辑软件编辑机器人各个微阀顺序打开程序,并传给机器人。
2)手动运行此程序,并观察机器人各个微阀是否顺序打开,对未打开的微阀进行更换后,继续测试,直至所有微阀按顺序打开。
3)后期根据油漆及溶剂的实际投放情况,根据喷车时的实际状态,最终判定微阀是否损坏。
3.机器人各个机械轴零点的标定
机器人安装完成后,需对机器人各个机械轴零点位置进行标定,以使机器人在喷涂过程中,按照所编辑的路径进行有序的喷涂,机器人零点标定方法如下(以ABB机器人为例):
1)用示教器将机器人调整到图3-15所示的位置(机器人零位各个轴均有标记)。(https://www.xing528.com)
2)在示教器中打开“service”→“calibrate”,选中“ROB_1”后选择“UpdateRev”,如图3-16所示。

图3-15 机器人零位
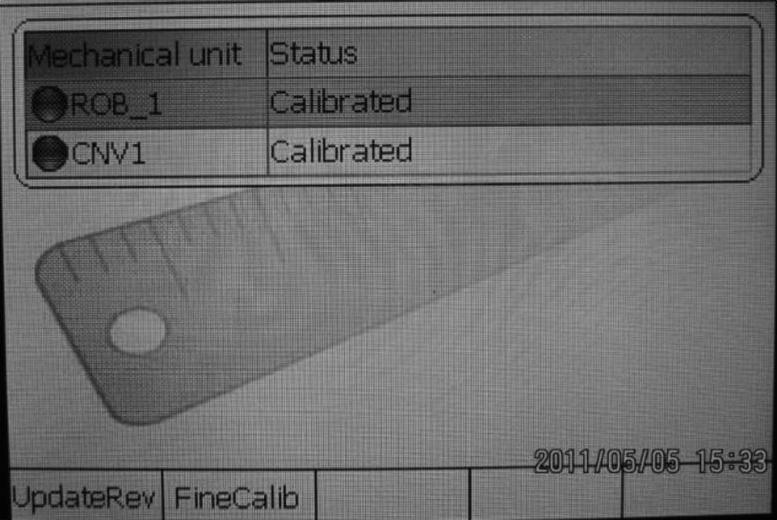
图3-16 机器人各个机械轴零点标定
4.机器人齿轮泵的标定
为了使机器人达到稳定的喷涂状态,机器人齿轮泵必须保证完好无损,且齿轮泵齿轮每转动一圈出漆量为一定值,在喷涂前期需对各个机器人的齿轮泵进行标定,如发现异常则更换齿轮泵。标定方法如下:
1)卸掉机器人杯帽,用示教器打开机器人某种颜色微阀、齿轮泵微阀及杯头针阀,并设定一定流量(不能加转速,以防伤人)。
2)用量筒接漆1min,查看量筒内油漆的体积,如与所设定流量值相同,则齿轮泵完好,如与所设定流量值不符,则齿轮泵存在问题,需进行更换,并重新标定。
5.机器人喷幅的测试
为了使车身质量(色差、橘皮、膜厚等)达到工艺范围以内,需要机器人的喷幅按照车身各个位置及油漆性质的不同而不同,故对于一个新的生产线来说,需要先对机器人喷涂参数(流量、成型空气一、成型空气二、转速、高压)对机器人喷幅形状的影响有一个基本的认识,这可通过示教器手工操作来完成,具体如下:
1)手动模式下,在机器人示教器中依次选择“Edit Brushes”→“Table→New”,命名(默认为“Table1”)后单击“OK”。
2)在示教器中选择“Edit Brushes”→“Table”→“Open”,选择Table1,将出现图3-17所示画面。
3)手工调整各个喷涂参数后,选择“Table”→“test”即可,并记录某一流量下喷幅较适中的成型空气、转速、高压值,以便颜色调试时使用。
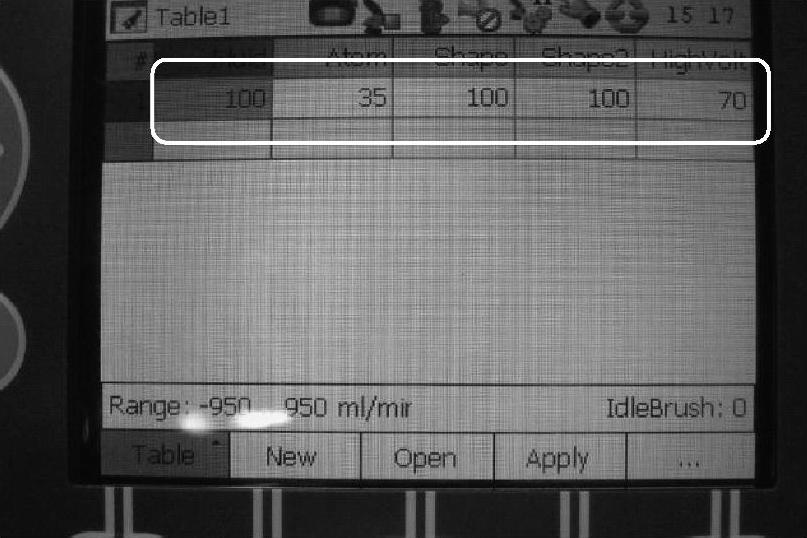
图3-17 机器人喷幅测试界面
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。