



1.步进电动机选用的基本原则
合理选用步进电动机是比较复杂的问题,需要根据电动机在整个系统中的实际工作情况,经过分析后才能正确选择。现仅就选用步进电动机最基本的原则介绍如下:
(1)步距角α 步距角应满足

式中,i为传动比;αmin为系统对步进电动机所驱动部件的最小转角。
(2)精度 步进电动机的精度可用步距误差或积累误差衡量。积累误差是指转子从任意位置开始,经过任意步后,转子的实际转角与理论转角之差的最大值,用积累误差衡量精度比较实用。所选用的步进电动机应满足
Δθm≤i[Δθs]
式中,Δθm为步进电动机的积累误差;[Δθs]——系统对步进电动机驱动部分允许的角度误差。
(3)转矩 为了使步进电动机正常运行(不失步、不越步),正常起动并满足对转速的要求,必须考虑:
1)起动转矩。一般起动转矩选取为
式中,Mq为电动机起动转矩;Ml0为电动机静负载转矩。
根据步进电动机的相数和拍数,起动转矩的选取如表10-48所示。Mjm为步进电动机的最大静转矩,是步进电动机技术数据中给出的。(https://www.xing528.com)
表10-48 步进电动机相数、拍数、起动转矩表

2)在要求的运行频率范围内,电动机运行转矩应大于电动机的静载转矩与电动机转动惯量(包括负载的转动惯量)引起的惯性力之和。
(4)起动频率。由于步进电动机的起动频率随着负载转矩和转动惯量的增大而降低,因此相应负载转矩和转动惯量的极限起动频率应满足
ft≥[fop]m
式中,ft为极限起动频率;[fop]m为要求步进电动机最高起动频率。
2.西门子6FC5系列步进电动机技术性能数据
西门子6FC5系列步进电动机技术性能数据见表10-49,安装尺寸如图10-32所示。
表10-49 西门子6FC5系列步进电动机技术性能数据 (单位:mm)
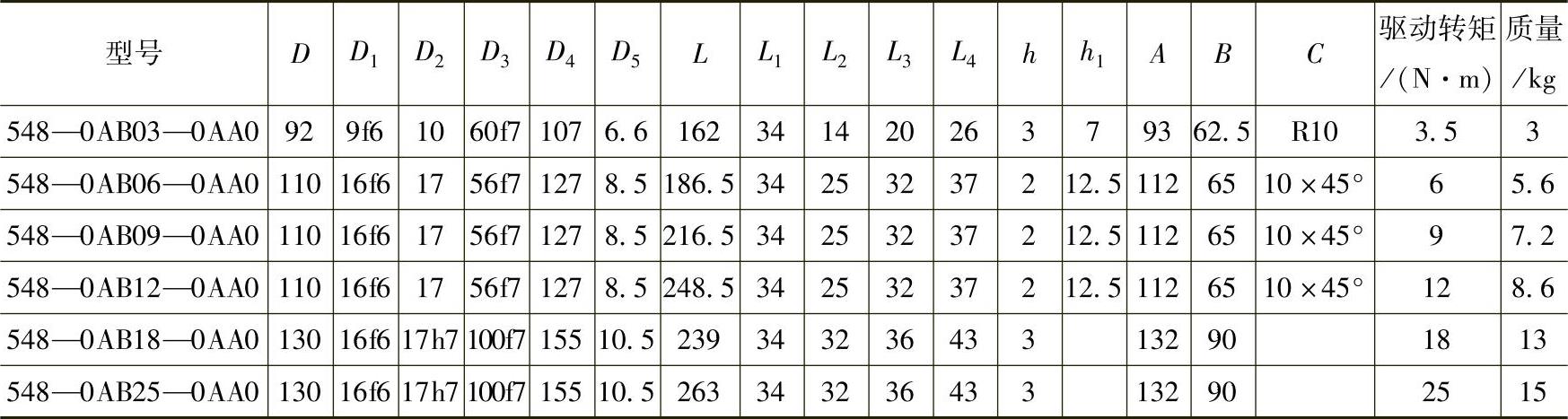
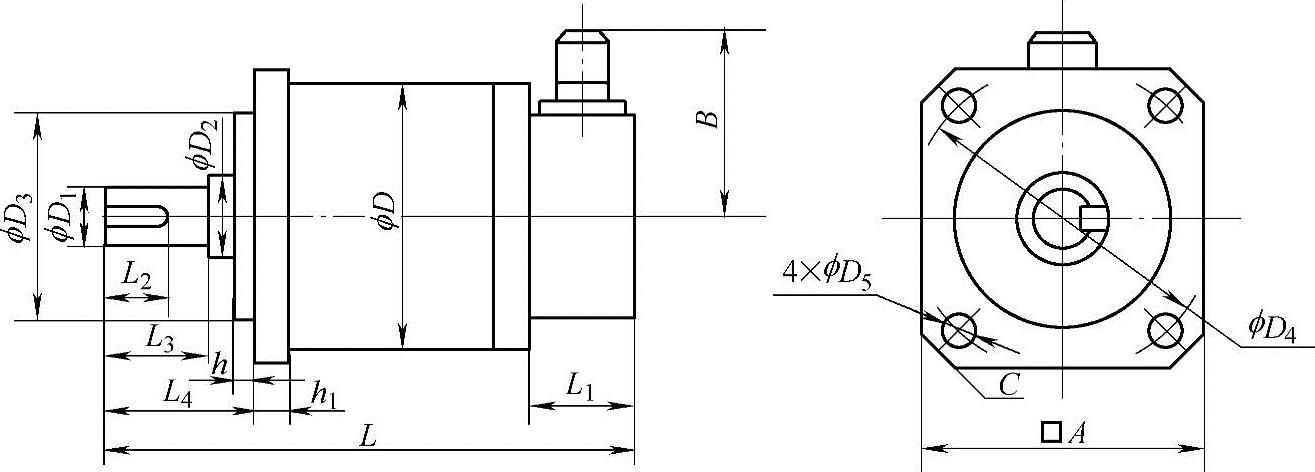
图10-32 西门子6FC5系列步进电动机安装尺寸
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。