



采用工业控制计算机与单片机组成的上下位机控制系统,可以实现较为复杂的控制过程,如机器人控制、工业过程控制,以及相应的控制算法、控制策略、路径规划、协调控制、数据通信及处理、图像处理、最优控制和自适应控制等控制方法的实现。本例仅以步进电动机作为控制对象,说明工控机在工业控制中实现的过程。
1.设计要求
1)步进电动机能实现正、反转,具有加速、恒速和减速功能。
2)步进电动机能实现正、反方向的点动调整及停止功能。
2.控制系统的元件选择
(1)步进电动机的选择 根据步进电动机工作负载情况,通过计算,选择如下:
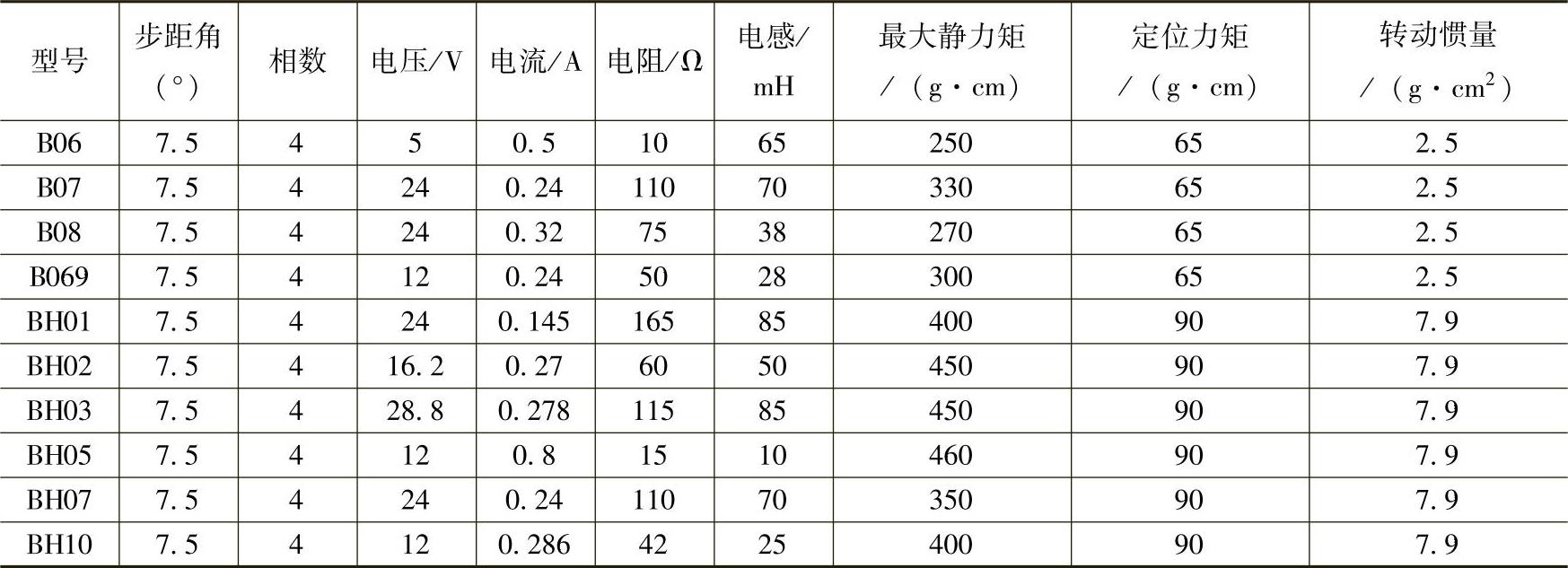
1)永磁式步进电动机:35BY48BH10,其技术参数见表9-87。
表9-87 35BY48系列技术参数
2)混合式步进电动机:42BYGH101,其技术参数见表9-88。
表9-88 42BYGH系列技术参数

(续)
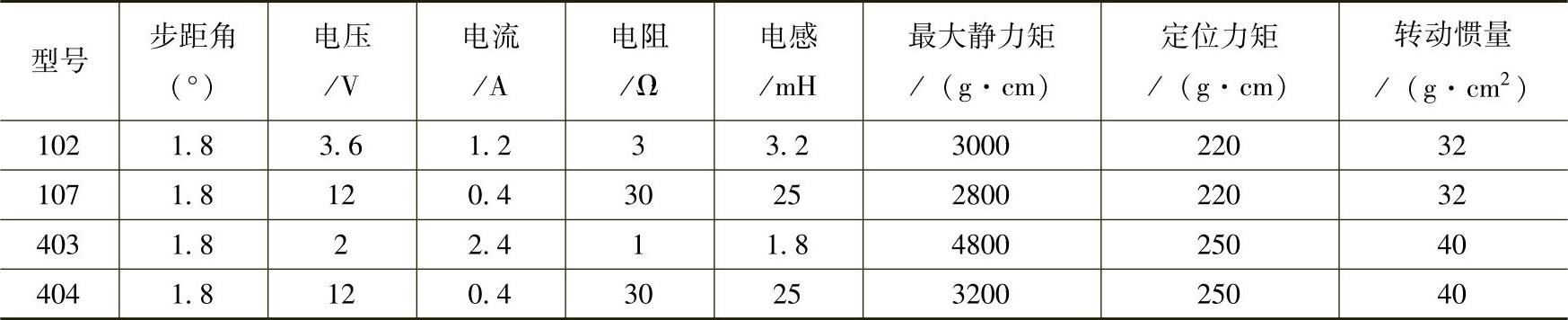
3)混合式步进电动机:57BYGH803,其技术参数见表9-89。
表9-89 57BYGH系列技术参数

(2)步进电动机驱动器的选择
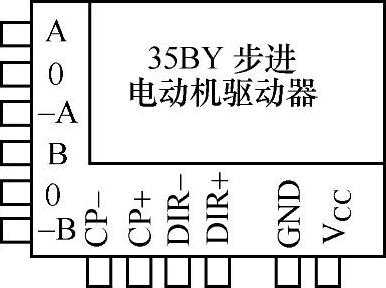
1)永磁式步进电动机驱动器选择。永磁式步进电动机驱动器选用,其接线图如图9-68。其中CP接PCL-839的PLUSE信号,DIR接PCL-839的DIR信号,VCC接12V直流电源,A、-A,B、-B接步进电动机的对应绕组,0接步进电动机的0端。
2)混合式步进电动机驱动器的选择。混合式步进电动机驱动器选用,其接线图如图9-69。其中CP接PCL-839的PLUSE信号,DIR接PCL-839的DIR信号,VCC接12V直流电源,A、-A,B、-B接步进电动机的对应绕组。
 (https://www.xing528.com)
(https://www.xing528.com)
图9-68 永磁式步进电动机驱动器接线图
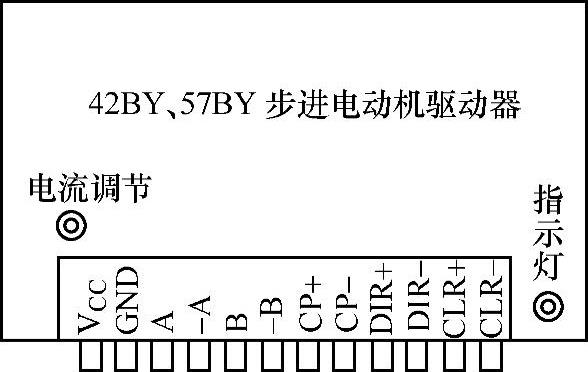
图9-69 混合式步进电动机驱动器接线图
(3)驱动卡的选择 给步进电动机驱动器发送控制信号通过驱动卡完成,驱动卡选用PCL-839。PCL-839是三轴智能步进电动机驱动卡,该卡的三个PCL-AK智能控制芯片可以执行各种动作,可以通过板卡上的I/O寄存器对每个轴进行控制,也可以使用该卡的高级解释器,利用VisualC语言进行编程控制,PCL-839的功能见表9-90。其各引脚功能如图9-70所示。其中DIR/-dir:方向信号输出(在方向模式下)或(-)方向脉冲输出(在脉冲模式下);PLUSE/+dir:脉冲信号输出(在方向模式下)或(+)方向脉冲输出(在脉冲模式下);EXT。VCC:外电源,5V或12V直流电源;CO-:各通道地;EL+:(+)方向紧急限位开关;EL-:(-)方向紧急限位开关;SD+:(+)方向减速限位开关;SD-:(-)方向减速限位开关;ORG:原位归零开关;LCO-:各通道限位开关地。
表9-90 PCL-839驱动卡功能说明
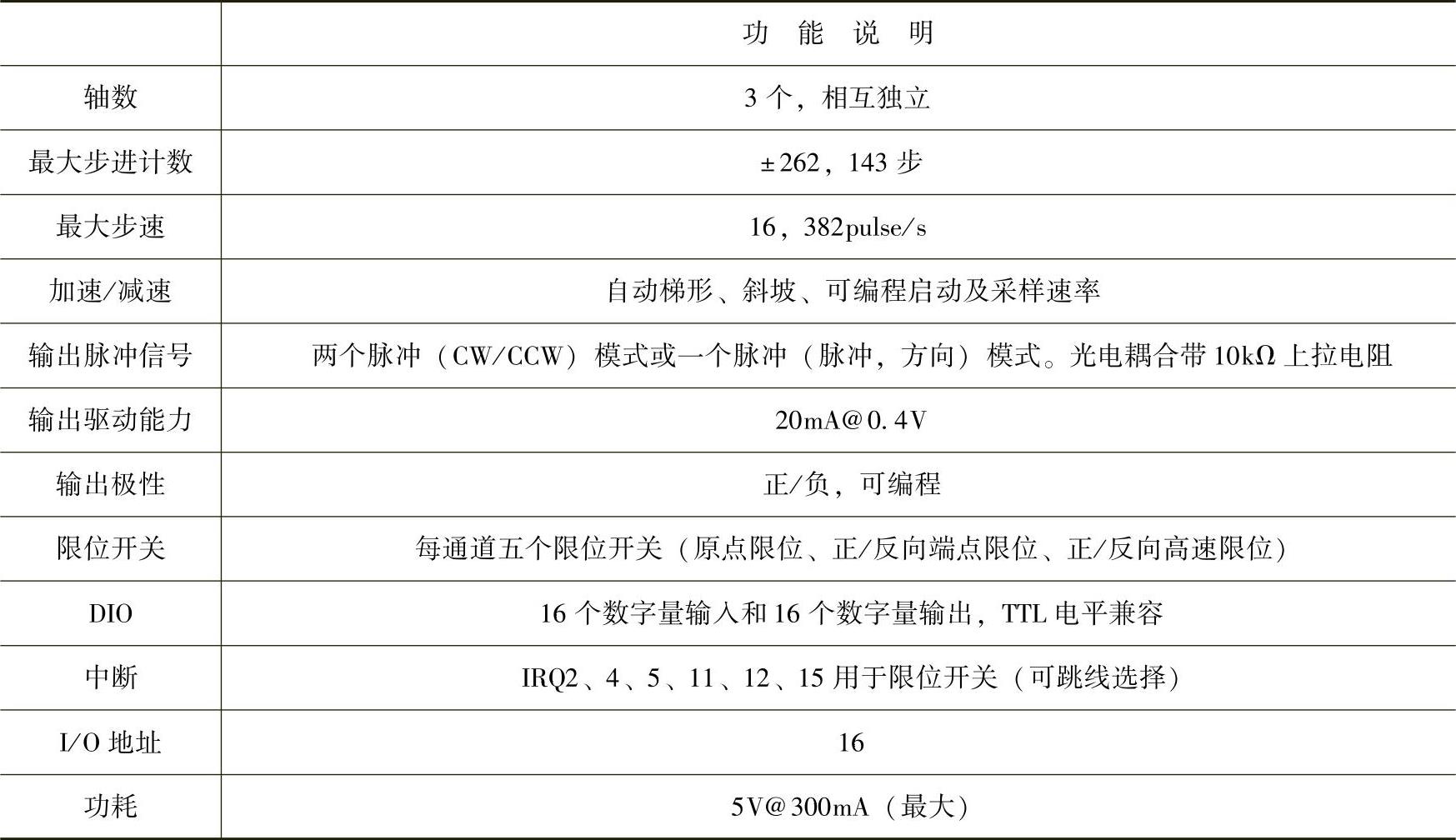
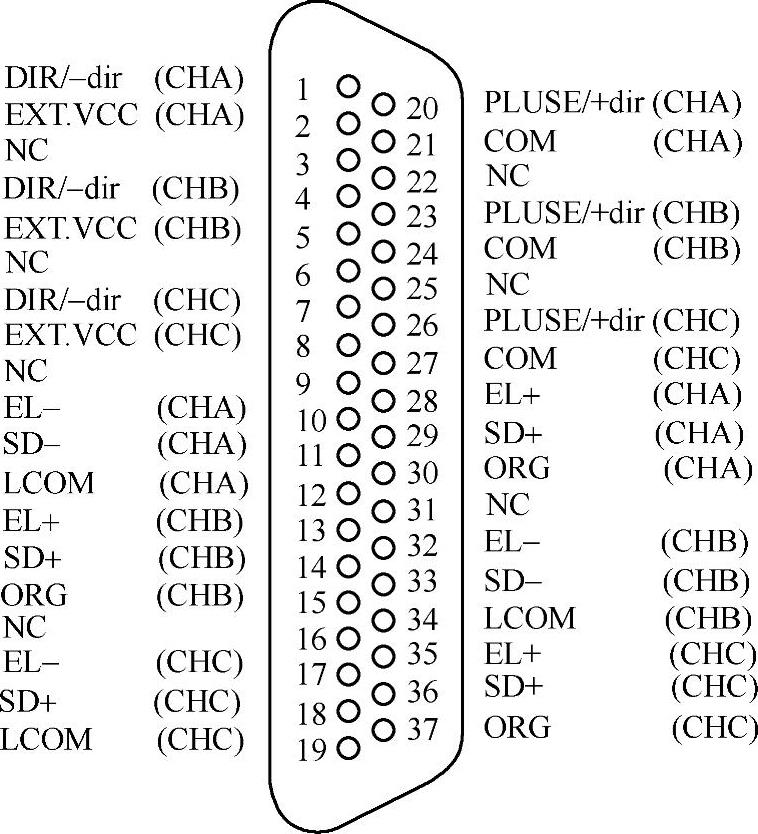
图9-70 PCL-839引脚排列图
(4)工业控制计算机的选择 工控机可以适当选择配置高一些的工控机,为以后的开发提供裕量,本例选择IPC-610工控机,其配置为PⅢ500,16-B内存,20GB硬盘等。
3.电路接线图
电路接线图如图9-71所示。
4.编程
部分程序清单如下,其对话框如图9-72所示。
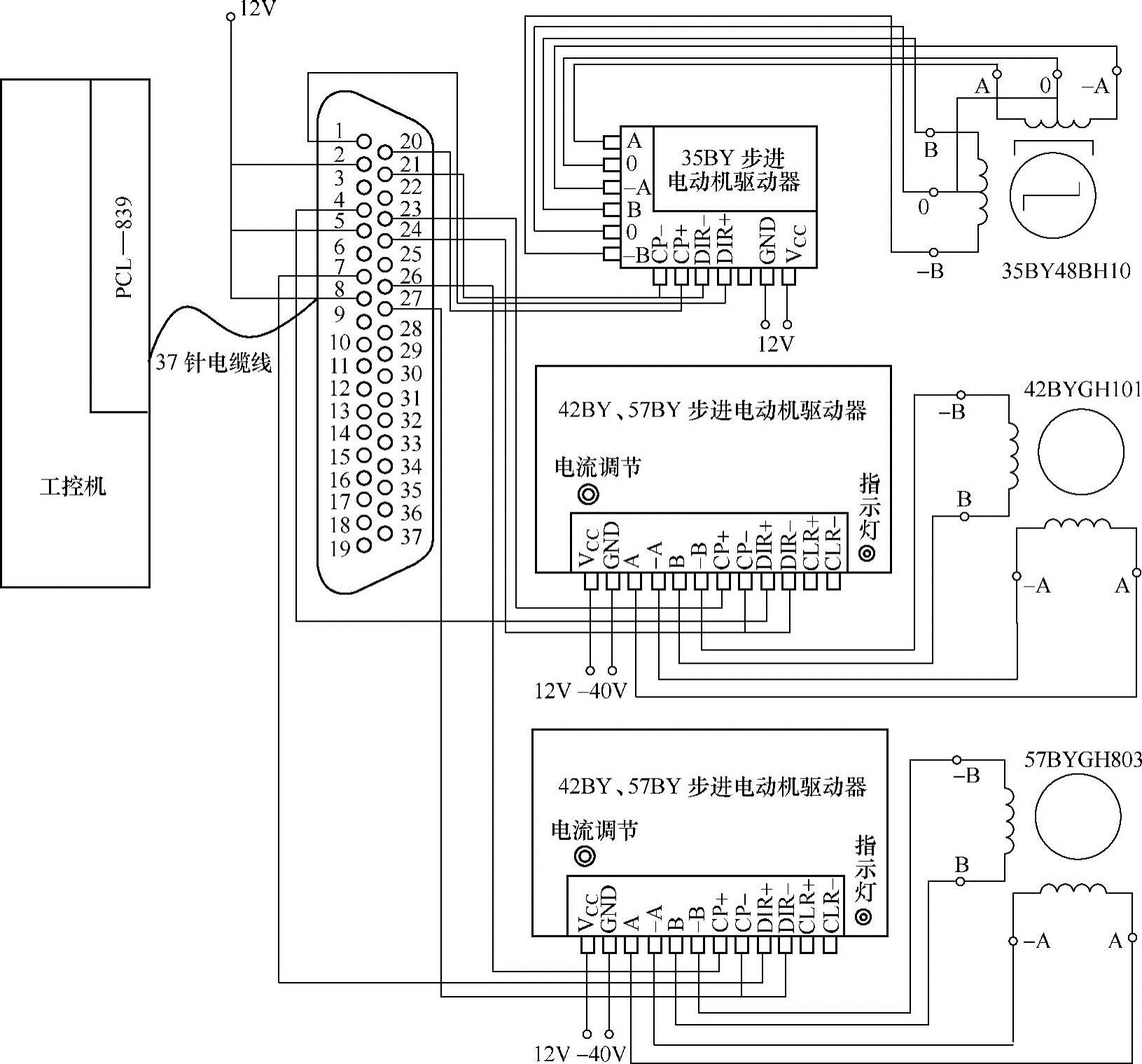
图9-71 电路接线图
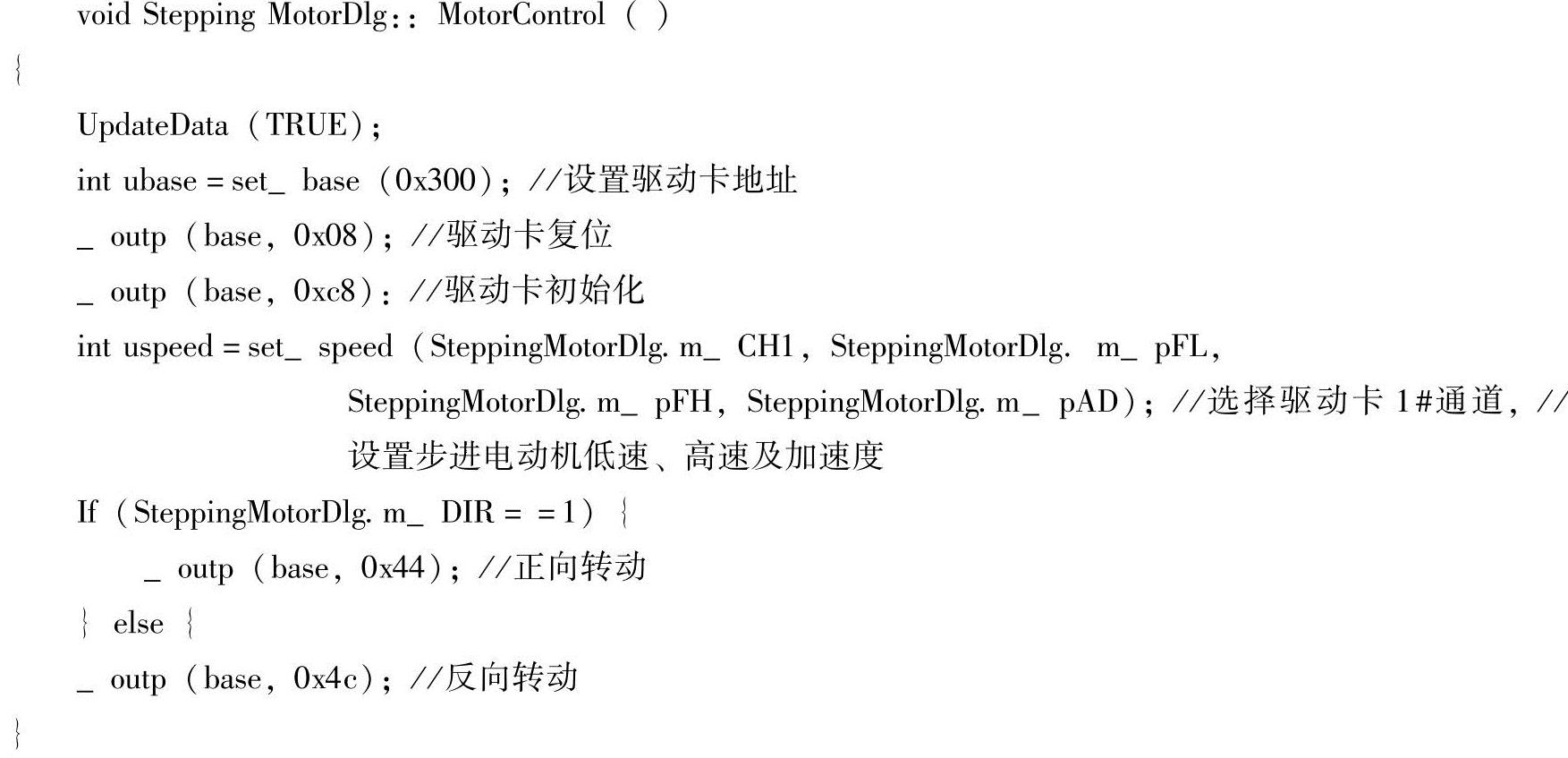
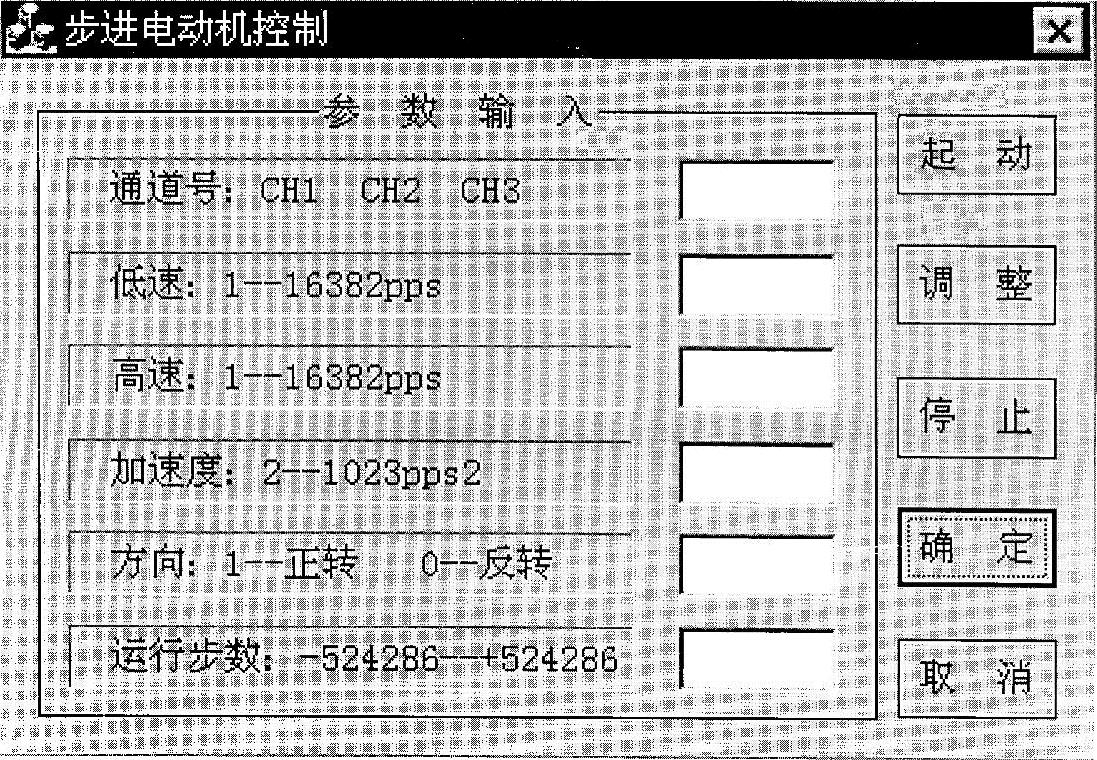
图9-72 步进电动机控制对话框
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。