



直流调速电动机在工农业生产中和日常生活中大量使用。设计要求为:驱动电压24V,最大速度为5m/s,采用闭环控制方式。驱动的设计对象是驱动轮式机器人,两轮的直径同为0.1m,驱动电动机选用直流电动机,为了满足加速度需求,每个电动机配备了减速装置,且两轮为独立驱动。小车运行过程中自带电池,电池的供电电压为DC24V,为满足机器人比赛需要,经需求分析可得该机器人运动控制系统的最大速度为5.0m/s,最大加速度为20m/s2,控制方案为闭环控制。
通过计算可知,在没有减速器的情况下,电动机应达到955r/min才能实现最大转速5.0m/s,起动时间应该小于0.25s才能达到最大加速度20m/s2的要求。所以,可以选择额定电压24V,空载转速2500r/min的直流电动机,采用调速比2.5的减速器,加速度要求通过软件实现。
系统要求采用闭环控制方案,本设计采用转速单闭环控制,选用旋转编码器作为测速传感器。旋转编码器不仅精度高,而且安全稳定、维护方便,在Proteus库里有配套旋转编码器的直流电动机,方便仿真。理论上旋转编码器的光栅数越大,测速越精确,但是光栅数的增大会增加制作难度和成本,本设计只是用于轮式机器人的测速,采用光栅数1024的旋转编码器足矣,同时可以采用四倍频电路提高转速分辨率。
1.直流电动机调速系统结构原理及仿真
(1)硬件系统结构图 直流电动机转速单闭环调速系统硬件结构图如图9-65所示。
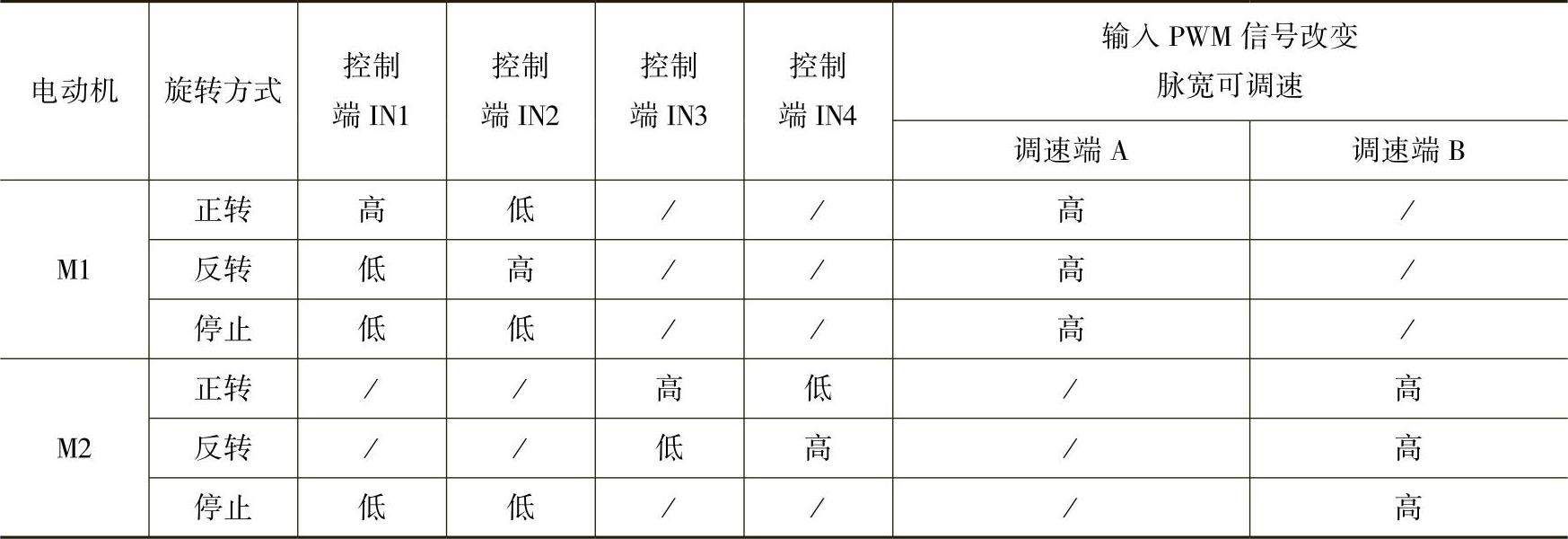
(2)电动机驱动芯片L298 L298是ST公司生产的一种大电流、高电压电动机驱动芯片。该芯片使用15脚封装,可以驱动一台两相步进电动机或四相步进电动机,也可以驱动两台直流电动机。该芯片额定功率25W,最高工作电压可达46V,输出电流的瞬间峰值可达3A,持续工作电流为2A。内含两个H桥的高电压大电流全桥式驱动器,可以用来驱动直流电动机和步进电动机、继电器线圈等感性负载,可以外接检测电阻,把变化量反馈给控制电路。L298驱动参数见表9-80。
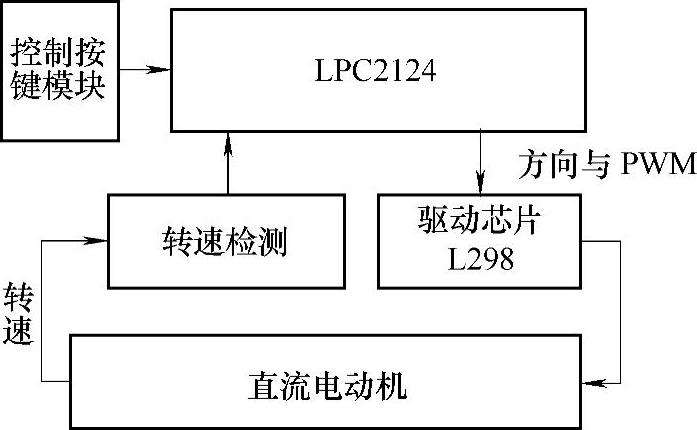
图9-65 直流电动机转速单闭环调速系统硬件结构图
表9-80 L298驱动参数表
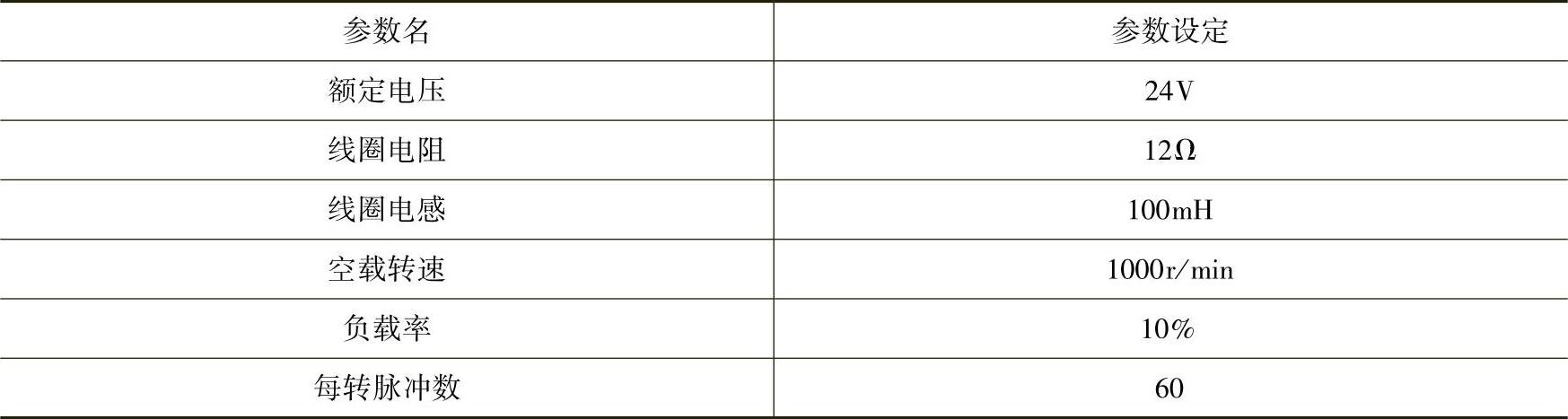
(3)直流调速电动机的Proteus仿真电路 从Proteus的元件库中选取一个带编码器的电动机-OTOR-ENCODER来仿真。利用编码器的输出信号来测量电动机的转速,从而实现对转速的检测。-OTOR-ENCODER的参数设置如表9-81所示。直流调速电动机整个仿真电路如图9-66所示。
表9-81 MOTOR-ENCODER参数设置
(4)PW-调速 系统采用PW-方法调整电动机的速度。先应确定合理的脉冲频率,当脉冲宽度一定时,频率对电动机运行平稳性有较大影响。高频脉冲时电动机运行连续性好,但带负载能力差,而低频脉冲率则反之。
调脉宽的方式有三种:定频调宽、定宽调频和调宽调频。本系统采用定频调宽方式,PW-输出频率采用系统时钟频率,通过转速调节器调节PW-占空比,实现直流电动机的调速驱动。
(5)测速与控制 本系统采用T法测速,旋转编码器输出的脉冲由LPC2124的P0.28捕获,电动机每转一圈旋转编码器输出60个脉冲,每捕获一个编码器输出脉冲,则进入中断读取定时器的值,计算测速时间,通过公式n=60/(z×ΔT)计算转速。
在数字控制系统中,若采样频率足够高,设计调节器可以按模拟系统的设计方法,然后进行离散化,然后得到数字控制器的算法。
当输入时误差函数为e(t)、输出函数是u(t)时,PI调节器的传递函数如下:
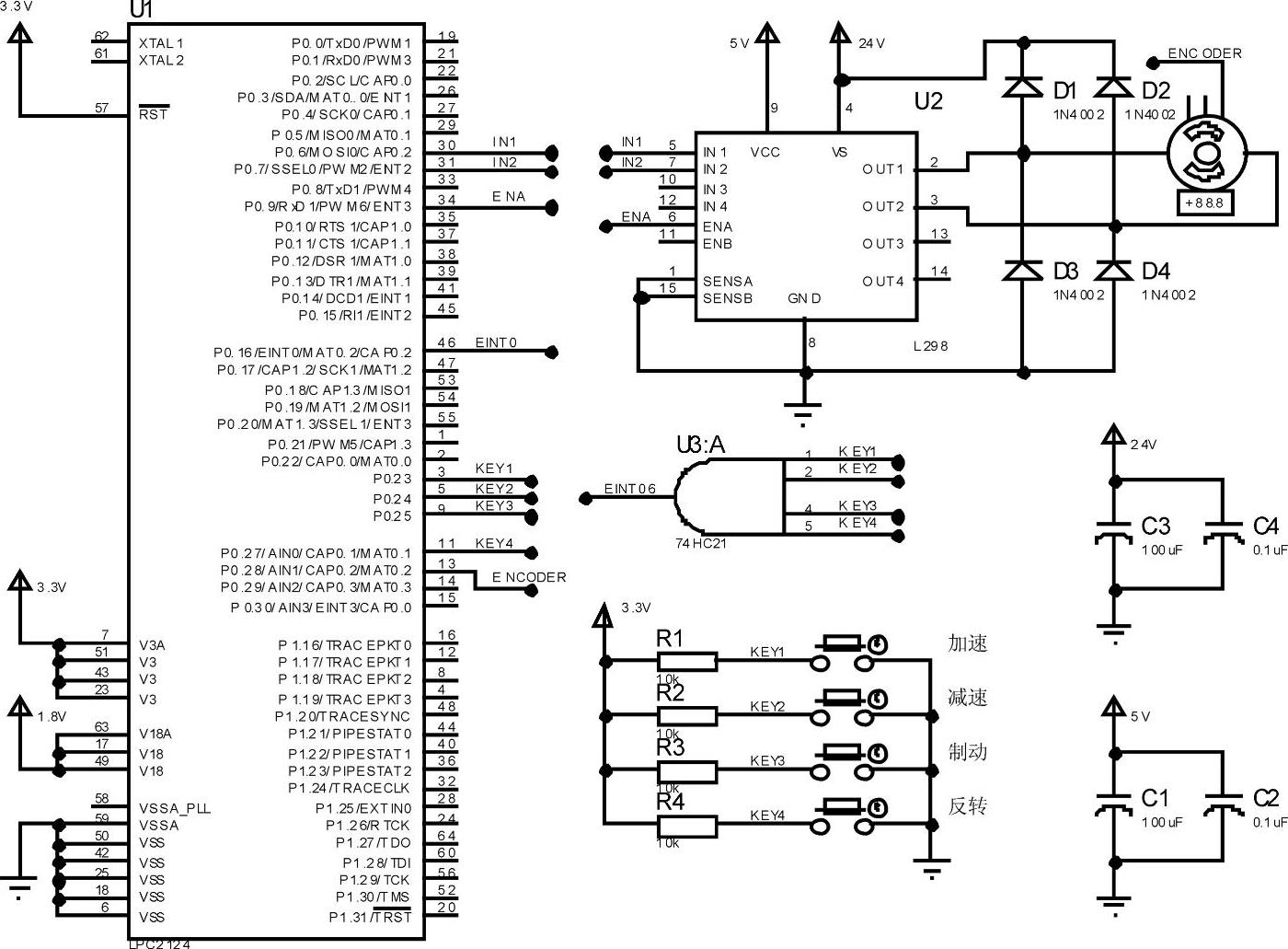
图9-66 直流电动机调速系统Proteus仿真电路(https://www.xing528.com)

式中,KPI为PI调节器比例部分的放大系数;τ为PI调节器的积分时间常数。
式中的时域表达式可写成:

式中,KP=KPI为比例系数;KI=1/τ为积分系数。
将上式离散化成差分方程,其第k拍输出为

式中,Tsam为采样周期。
上式表述的差分方程为位置式算法,u(k)为第k拍的输出值。
2.直流调速电动机系统的软件设计
直流电动机调速系统软件设计流程图如图9-67所示。
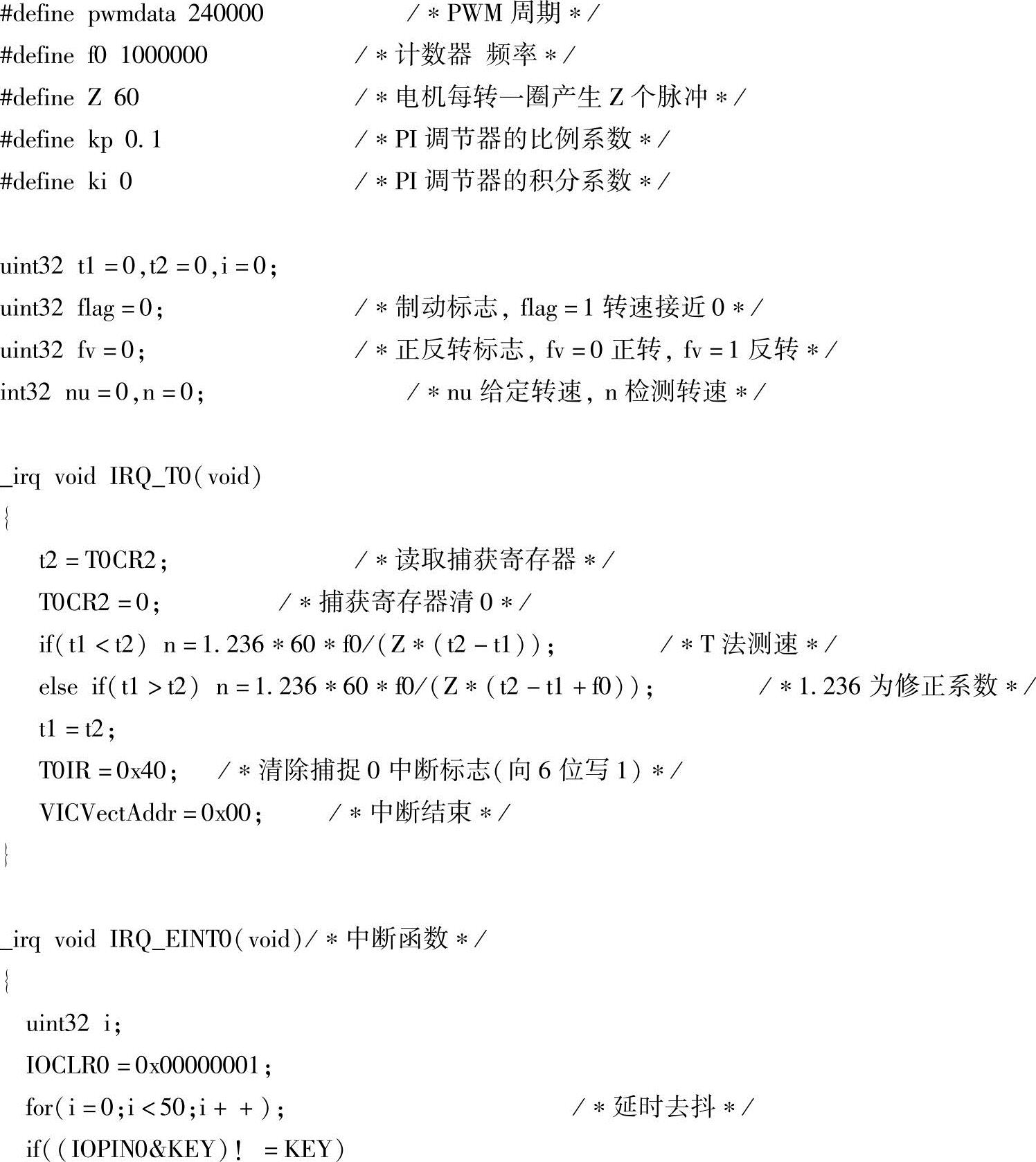
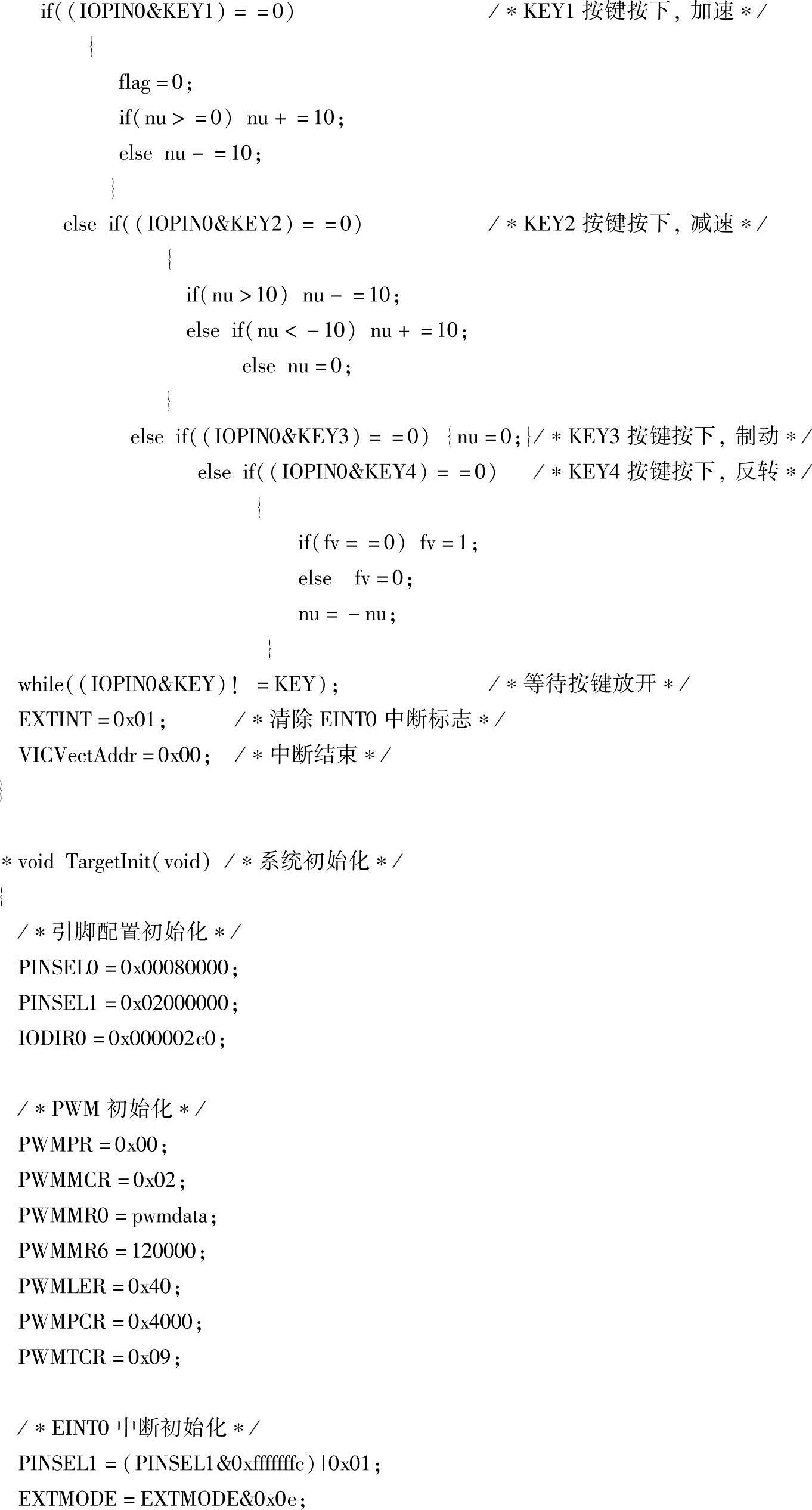
下面给出程序清单供参考。
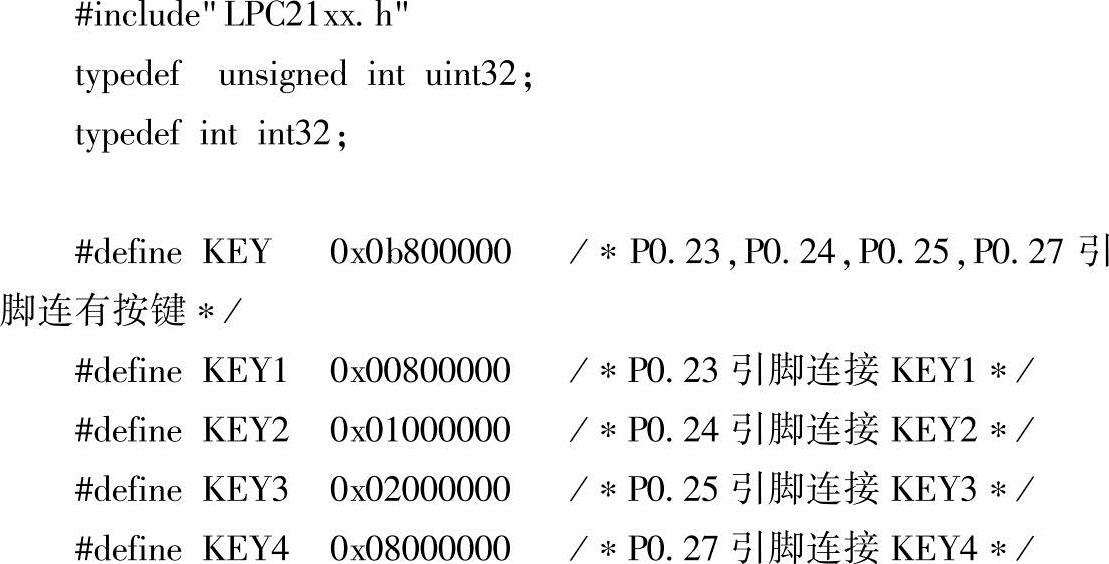
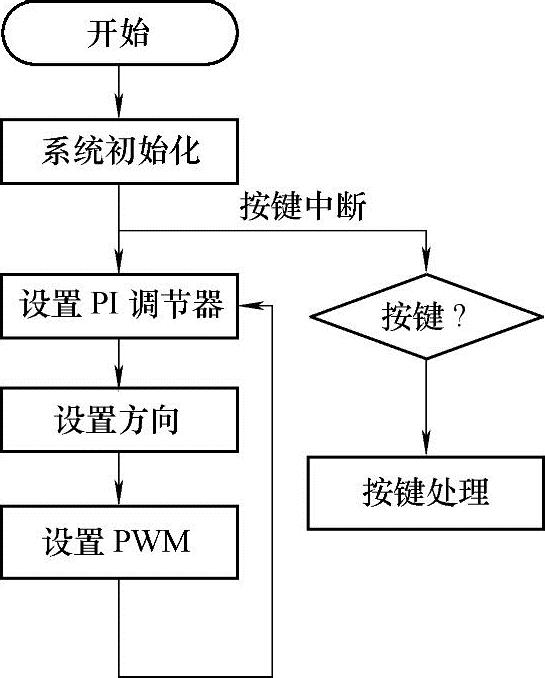
图9-67 调速系统软件设计流程图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。