



1.概述
机械手是最早出现的工业机器人,也是最早出现的现代机器人,它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工业和原子能等部门。
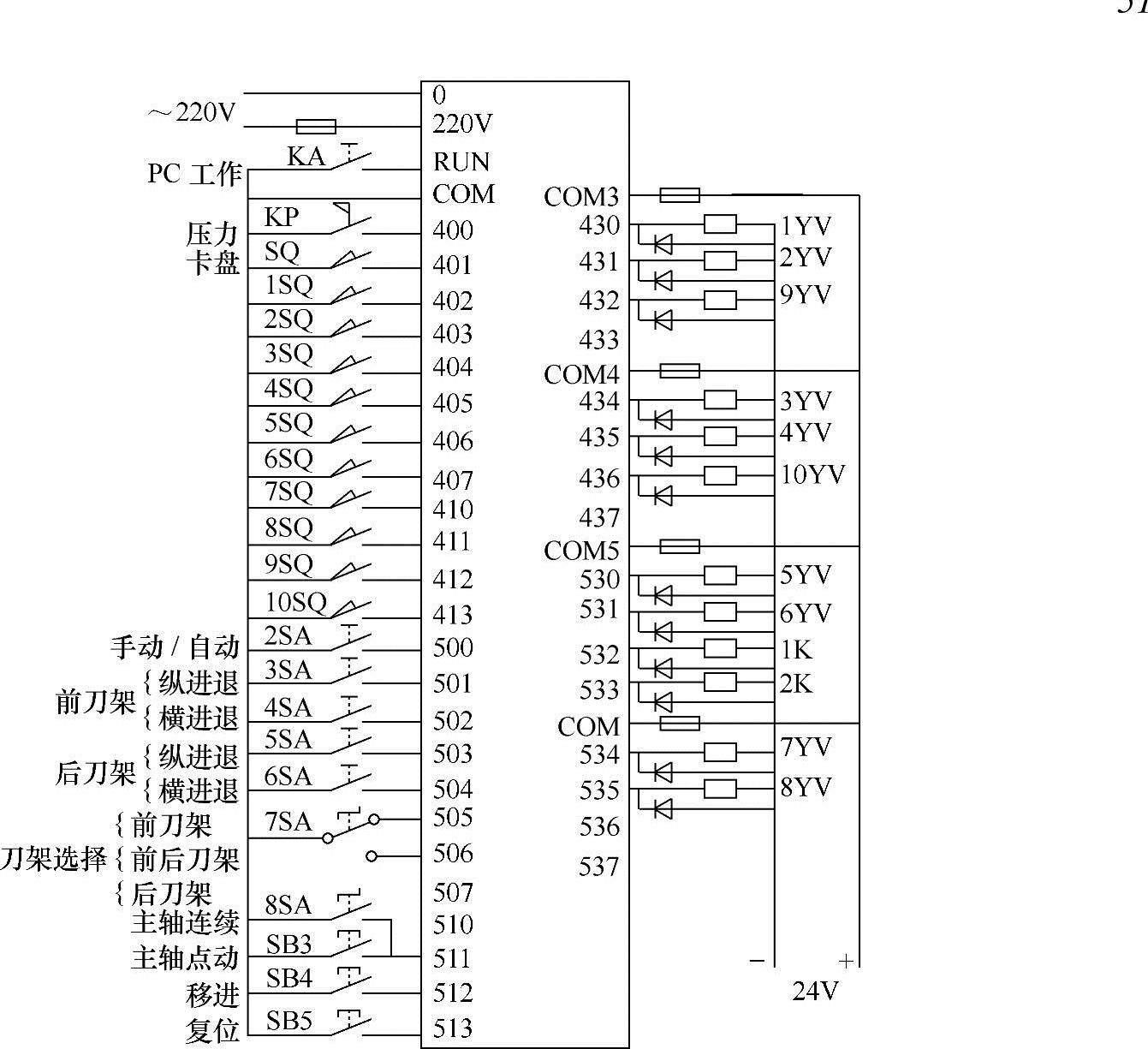
图8-10 PLC输入/输出接线图
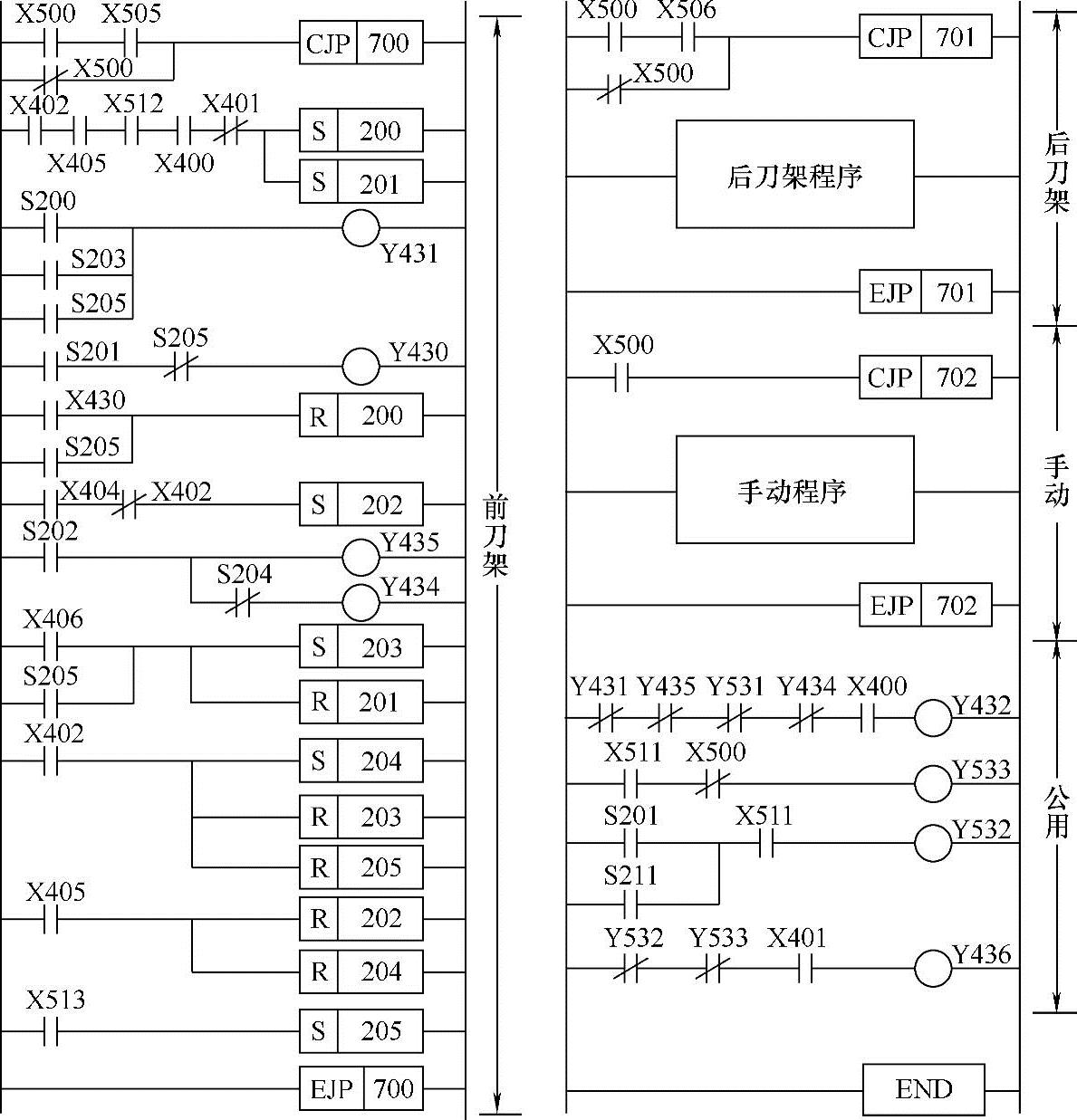
图8-11 梯形图
2.构成
机械手主要由手部、运动机构和控制系统三大部分组成。手部是用来抓持工件(或工具)的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。运动机构,使手部完成各种转动(摆动)、移动或复合运动来实现规定的动作,改变被抓持物件的位置和姿势。运动机构的升降、伸缩、旋转等独立运动方式,称为机械手的自由度。为了抓取空间中任意位置和方位的物体,需有6个自由度。自由度是机械手设计的关键参数。自由度越多,机械手的灵活性越大,通用性越广,其结构也越复杂。一般专用机械手有2~3个自由度。控制系统是通过对机械手每个自由度的电动机的控制来完成特定动作,同时接收传感器反馈的信息,形成稳定的闭环控制。控制系统的核心通常是由单片机或DSP等微控制芯片构成,通过对其编程实现所要功能。
3.设计内容
机械手控制示意图如图8-12所示。
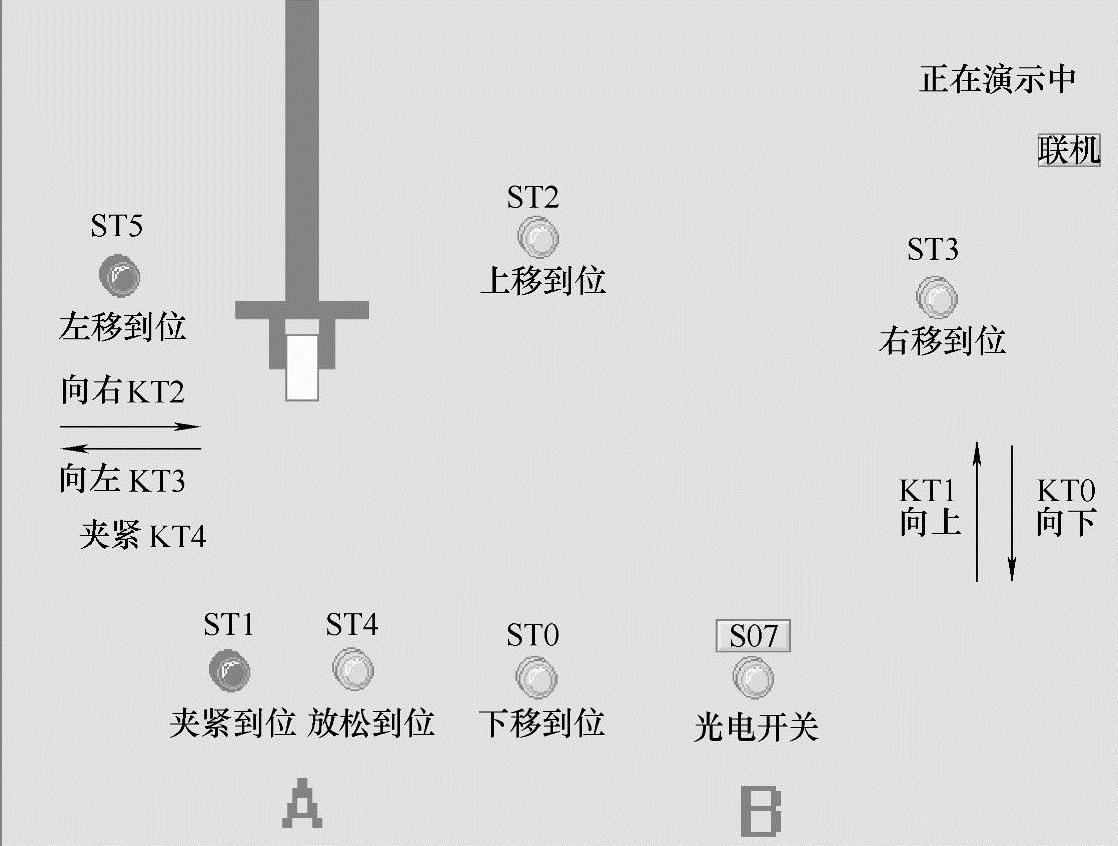
图8-12 机械手控制示意图(https://www.xing528.com)
1)机械手“取与放”搬运系统,定义原点为左上方所达到的极限位置,其左限位开关闭合,上限位开关闭合,机械手处于放松状态。
2)搬运过程是机械手把工件从A处搬到B处。
3)上升和下降,左移和右移均由电磁阀驱动气缸来实现。
4)当工件处于B处上方准备下放时,为确保安全,用光电开关检测B处有无工件。只有在B处无工件时才能发出下放信号。
5)机械手工作过程:起动机械手下降到A处位置→夹紧工件→夹住工件上升到顶端→机械手横向移动到右端,进行光电检测→下降到B处位置→机械手放松,把工件放到B处→机械手上升到顶端→机械手横向移动返回到左端原点处。
机械手控制系统设计流程图如图8-13所示,梯形图如图8-14所示。
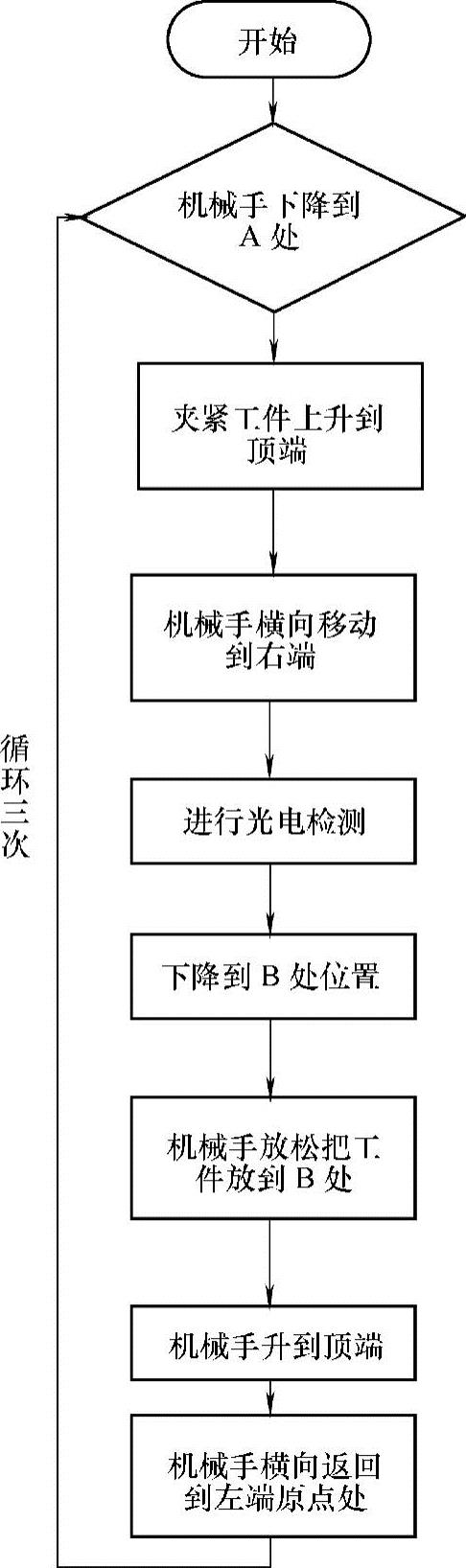
图8-13 设计流程图
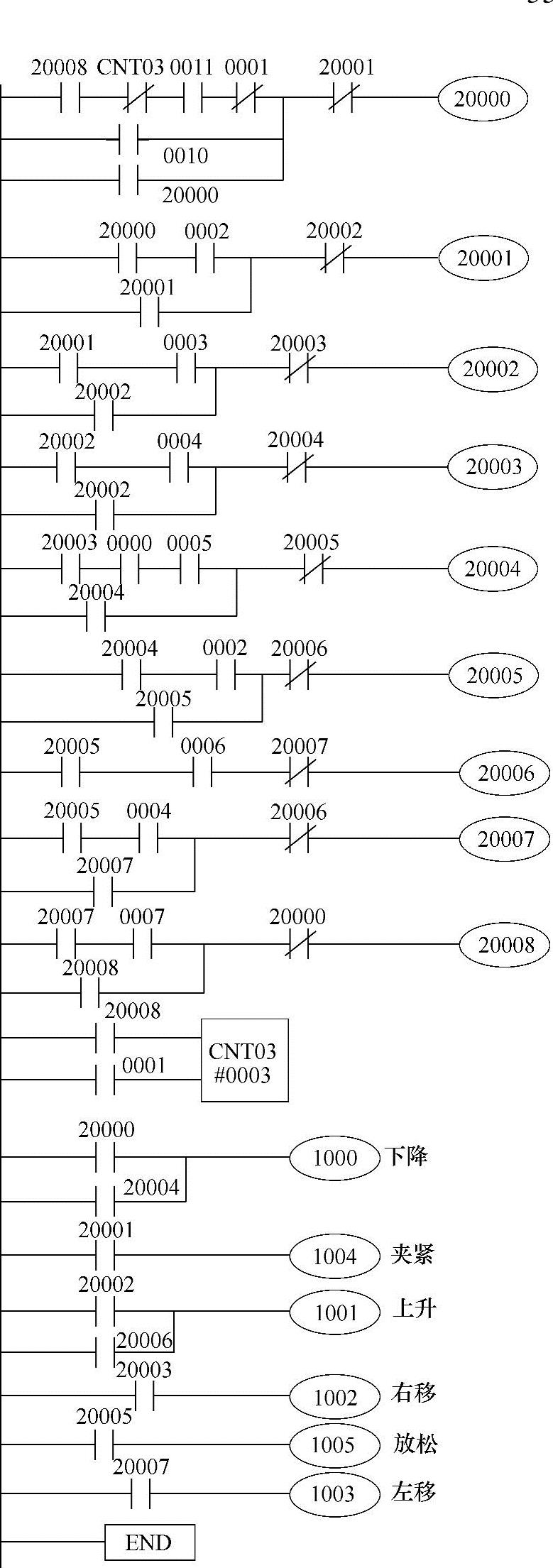
图8-14 梯形图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。