



【摘要】:图12-11 S7-200 PLC梯形图2.S7-300 PLC程序的编写根据控制要求,S7-300 PLC程序编写如图12-12所示。图12-12 S7-300 PLC OB1程序3.全局变量的设置根据控制要求,第二台电动机要想起动,必须判断第一台电动机的运行状态。因此,S7-300 PLC需要接收S7-200 PLC传递过来的第一台电动机运行状态,通信信息由WinCC软件实现,具体操作如下:1)单击WinCC管理器“计算机”属性,按照图12-13所示步骤,选择“全局脚本运行系统”。图12-13 设置计算机属性2)在导航窗口中,选中“全局脚本”,如图12-14所示。
1.S7-200 PLC程序的编写
根据控制要求,S7-200 PLC程序编写如图12-11所示。
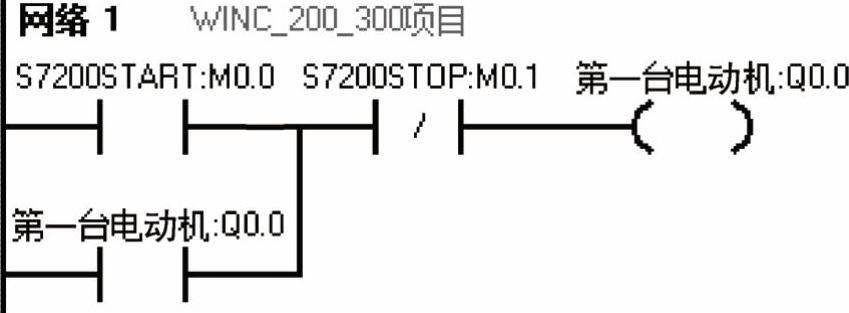
图12-11 S7-200 PLC梯形图
2.S7-300 PLC程序的编写
根据控制要求,S7-300 PLC程序编写如图12-12所示。
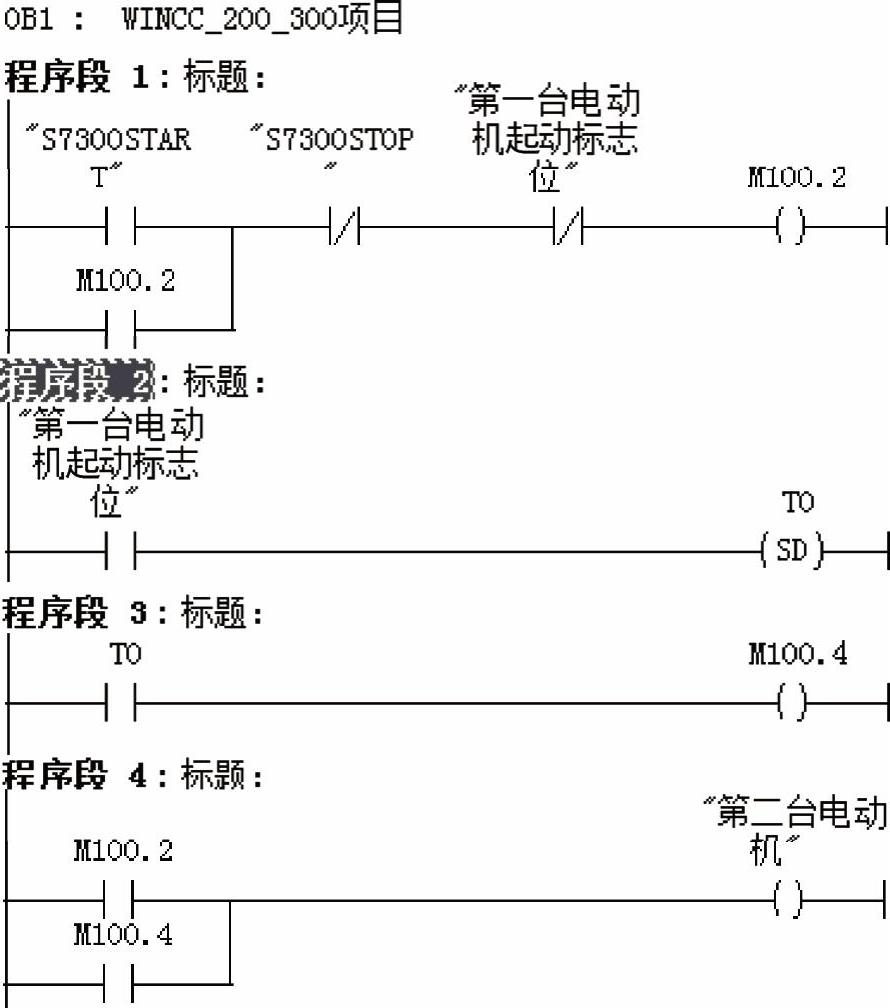
图12-12 S7-300 PLC OB1程序
3.全局变量的设置
根据控制要求,第二台电动机要想起动,必须判断第一台电动机的运行状态。如果第一台电动机起动,则第二台电动机延时5s自起动;如果第一台电动机没有运行,则第二台电动机可以在本地控制起动、停止状态。因此,S7-300 PLC需要接收S7-200 PLC传递过来的第一台电动机运行状态,通信信息由WinCC软件实现,具体操作如下:
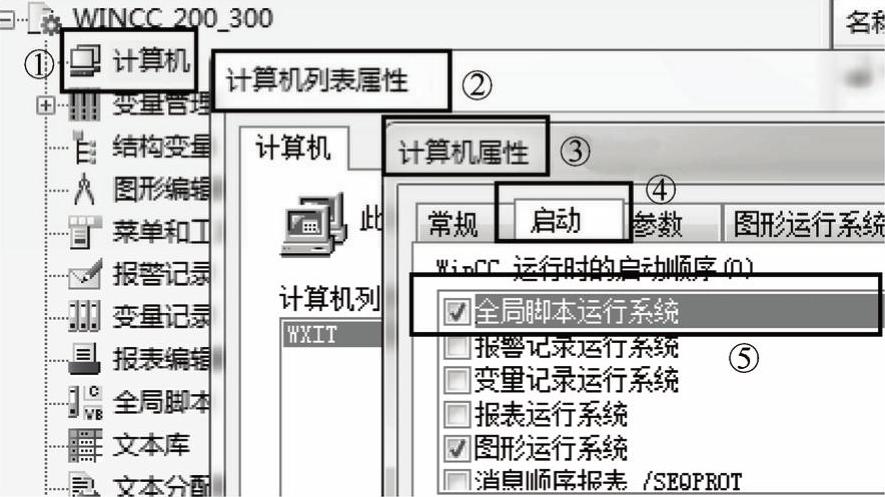
1)单击WinCC管理器“计算机”属性,按照图12-13所示步骤,选择“全局脚本运行系统”。
 (https://www.xing528.com)
(https://www.xing528.com)
图12-13 设置计算机属性
2)在导航窗口中,选中“全局脚本”,如图12-14所示。

图12-14 全局变量路径
3)脚本编写。变量传递程序的编写如图12-15所示。将第一台电动机运行状态S7-200MOTOR变量传递给S7-300 PLC的状态标志位S7-200 LABEL,即S7-300 PLC程序中的“第一台电动机起动标志位”变量,由该变量起动5s定时器延时,从而达到第一台电动机状态控制第二台电动机起停的目的。
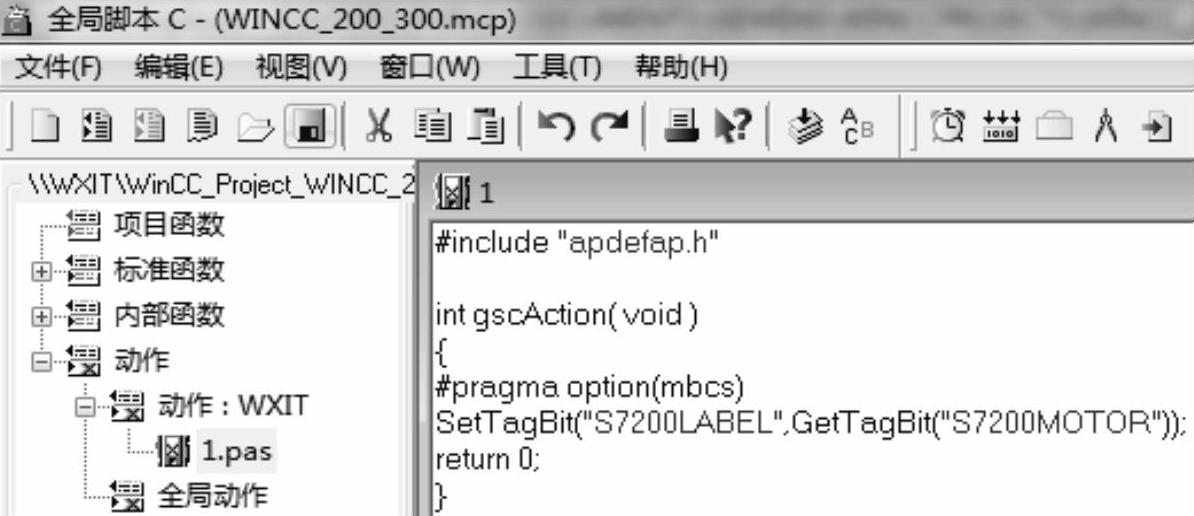
图12-15 全局脚本程序
在采用全局变量编写程序时,还需要设置变量触发的属性,本系统设置触发动作步骤如图12-16所示。
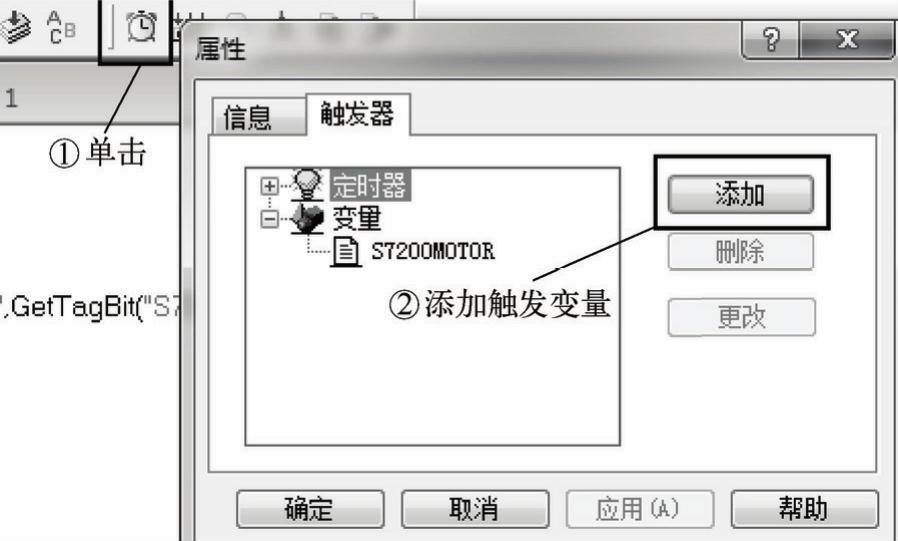
图12-16 全局变量触发动作设置
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。