



在设计PLC程序时,设计要点如下:
1)为了保证精度,一般将FB41放在OB35中。OB35是个以固定时间间隔循环执行的组织块,间隔时间20ms已在硬件配置中设置,使得系统每隔20ms执行一次PID功能块。
2)由于HMI要修改设定位置值和实时显示当前位置值,需要进行模拟量输入、模拟量输出量程的转换,可采用FC105/FC106功能。
FC105将一个整形数(IN)转换成一个在上下限之间变化的实际工程值,并将结果写到OUT中。将模拟量输入的数字量转换成工程量如图8-63所示。
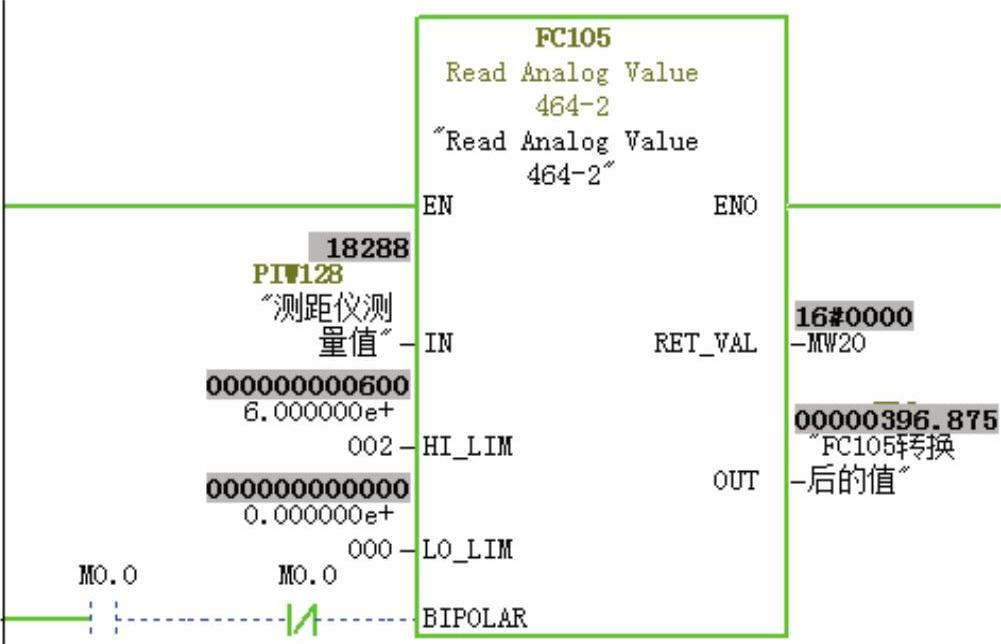
图8-63 FC105的应用
在图8-63中,HI_LIM为工程量标定上限、LO_LIM为工程量标定下限。BIPOLAR为极性输入端,0表示输入为单极性,即输入的整形范围为(0~27648),对应工程值范围(HI_LIM~LO_LIM);1表示输入为双极性,即输入的整形范围为(-27648~+27648),对应工程值范围为(HI_LIM~LO_LIM);OUT为量程转换结果,为实数。(https://www.xing528.com)
PIW128是测距仪测量的乒乓球高度,为要转换为工程量的输入值;系统标定乒乓球运动范围为0~600mm;因此输入值通过FC105转化成0~600mm范围内变化的工程值。
FC106将一个实数(IN)转换成上下限之间变化的实际工程值,并将结果写到OUT中。将模拟量输出的数字量转换成工程量如图8-64所示。
PID模块按照工程量单位计算后的输出值放在MD6中,模拟量输出通道设定为电压、单极性0~10V范围;由于PWM控制极电压范围为0~5V电压,对应高度0~600mm,为了保证模拟量输出0~5V的电压,因此在标定时HI_LIM为1200,LO_LIM为0。
由于工程换算范围为(HI_LIM~LO_LIM),则上限1200对应数字量27648,对于模拟量输出通道而言得到的电压是10V;下限0对应数字量0,对于模拟量输出通道而言得到的电压是0V;对于600而言得到的输出电压是5V。
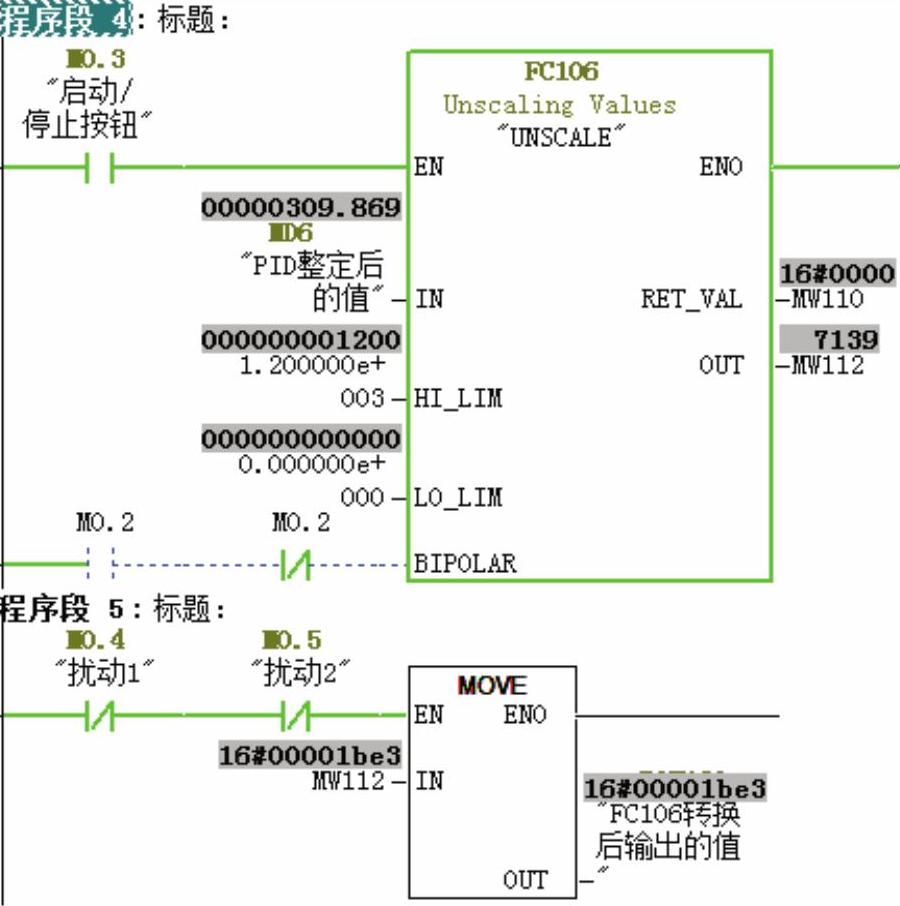
图8-64 FC106的应用
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。