



在PLC中,可以自己编写程序,实现PID运算功能,也可以调用PLC中提供的PID模块,按照模块说明设置相关参数,本例采用PID功能块实现系统闭环控制功能,该类功能块的性能和处理速度只取决于所使用的CPU性能。
PID控制包的功能块包含了用于连续控制的CONT_C(FB41)功能块、用于步进控制的CONT_S功能块以及用于脉宽调制的PULSEGEN的功能块。控制器块实现了一个纯软件控制器,它所包含的功能块可以提供控制器的所有功能,循环计算所需要的数据存储在为FB分配的数据块中,这样可以按照需要频繁地调用FB。
小球位置和风机转动属于连续输入和输出变量的工艺过程,因此采用FB41功能块。
PID功能块调用路径如图8-40所示,FB41功能块设置参数如图8-41所示。
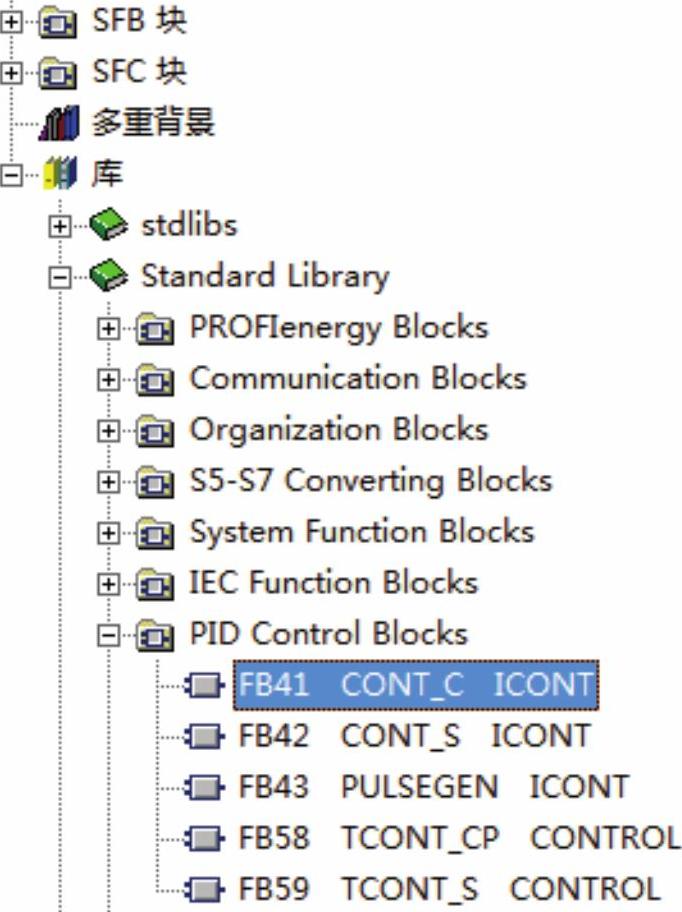
图8-40 FB41的位置
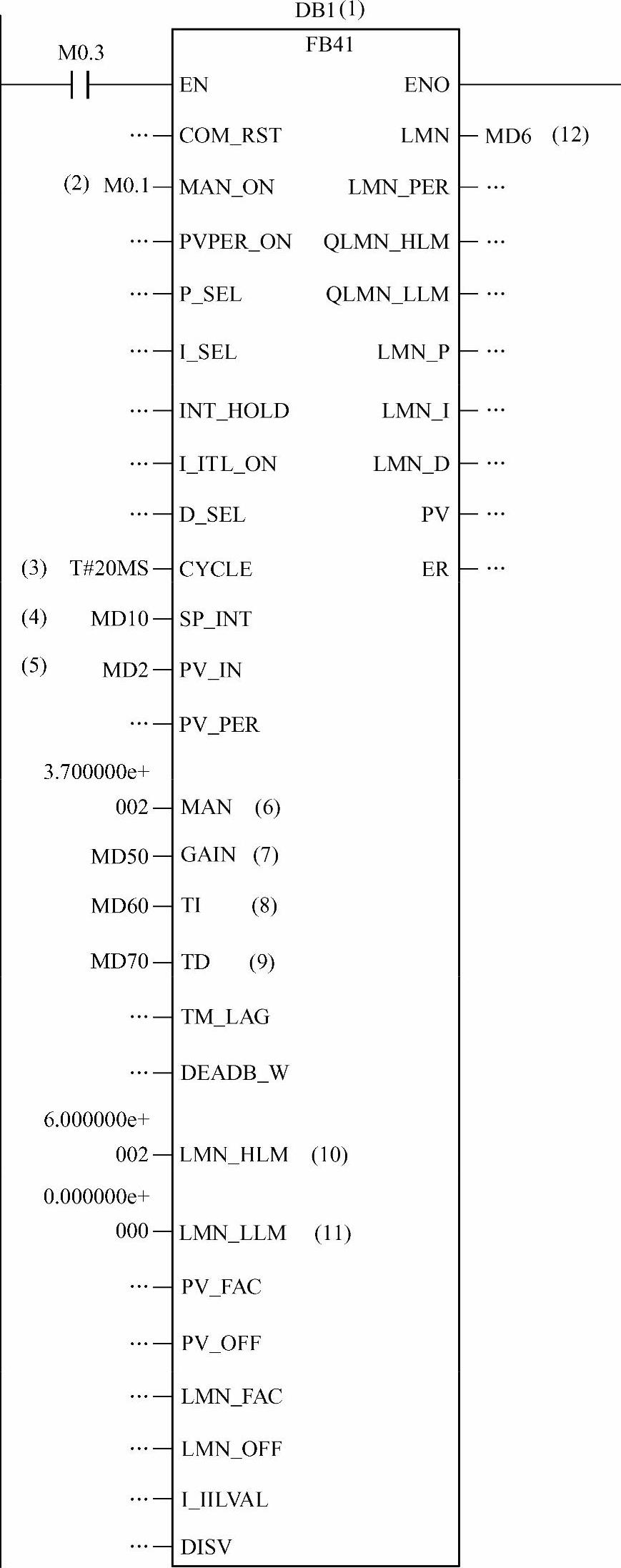
图8-41 FB41参数设置
图8-41为FB41功能块需要设置的参数,在这里仅对本例需要用到的参数做一个简单说明。
1)DB1:功能块FB41的背景数据块。
2)MAN_ON:手动值打开,当该位为“1”时,PID可直接将MAN的值输出到LMN。(https://www.xing528.com)
3)CYCLE:采样时间,块调用之间的时间间隔必须恒定,采样时间输入确定了块调用之间的时间间隔。
4)SP_INT:内部设定值,用于输入小球高度的设定值。
5)PV_INT:过程变量输入值,用于实时显示小球当前高度值。
6)MAN:手动值,当MAN_ON=1时有效。
7)GAIN:比例增益。
8)TI:积分时间。
9)TD:微分时间。
10)LMN_HLM:调节值上限,调节值总是受到上限和下限的限制,该值指定调节值的上限。
11)LMN_LLM:调节值下限,调节值总是受到上限和下限的限制,该值指定调节值的下限。
12)LMN:PID计算后的输出值。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。