



1.控制要求
用PLC实现台车的呼车控制系统的功能。如图4-37所示,一部电动运输车供8个加工点使用。台车的控制要求如下:PLC上电后,车停在某个加工点(下称工位),若无用车呼叫(下称呼车)时,则各工位的指示灯亮,表示各工位可以呼车。如果工作人员按下本工位的呼车按钮呼车时,各工位的指示灯均灭,此时其他工位呼车无效。如停车位呼车时,台车不动,呼车工位号大于停车位号时,台车自动向高位行驶,当呼车位号小于停车位号时,台车自动向低位行驶,当台车运行到呼车工位时自动停车。停车时间为30s供呼车工位使用,其他工位不能呼车。从安全角度出发,停电再来电时,台车不应自行起动。
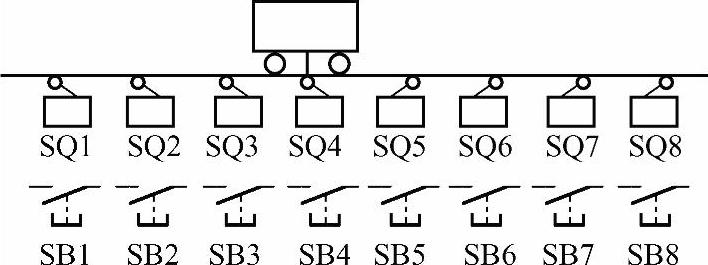
图4-37 台车运行示意图
2.预备知识
根据设计要求,程序结构可以使用一个主程序,也可以采用在主程序中调用子程序的方法,本设计采用调用子程序的方法,这部分内容在前面3.4节中已有描述,可参阅。
子程序逻辑关系编写时主要考虑比较台车实际位置与呼叫工位编号的关系。由图4-24可见,当台车位置小于呼叫位置时,控制台车右行;当台车位置大于呼叫位置时,控制台车左行,可用到数据比较指令,这部分内容在前面3.5节中已有描述,可参阅。
3.功能的实现
(1)PLC I/O地址分配
PLC I/O地址分配见表4-14。
表4-14 PLC的I/O地址分配表(https://www.xing528.com)

(2)程序设计
根据控制要求设计主程序如图4-38所示。其中网络1为呼车控制系统启动、停止功能,M0.0为系统启动/停止标志位;网络2为系统启动后给位置存储器VB0、工位呼叫存储器VB1清零,以便下一步接收新的数据;网络3为系统启动后调用呼车子程序。
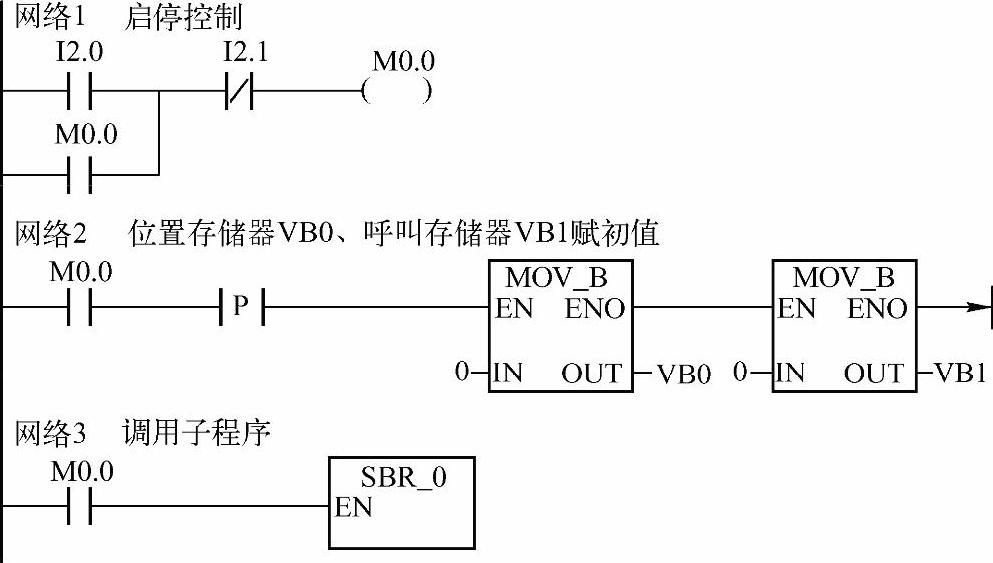
图4-38 主程序
呼车控制子程序主要包括台车位置显示、呼叫信号处理和台车驱动处理三部分功能,程序如图4-39所示。网络1~网络8为台车实际位置编号显示;网络9~网络16为呼叫台车工位编号显示;当有呼叫信号时,呼叫按钮按下,网络18的M0.1=1,从网络17可见,可用车指示灯Q0.1=0,其他工位不能再呼叫台车,直到本次用车完毕,T37动作,M0.1=0,可用车指示灯重新点亮;网络19~网络22为系统判断台车位置与呼叫编号的关系,或者左行(Q0.3=1)或者右行(Q0.2=1),直到台车到达呼叫位置,VB0=VB1,台车制动(Q0.0=1),同时延时30s,完成工位工作;M0.2的逻辑控制确保了当上电后台车不能自启动,符合控制要求。
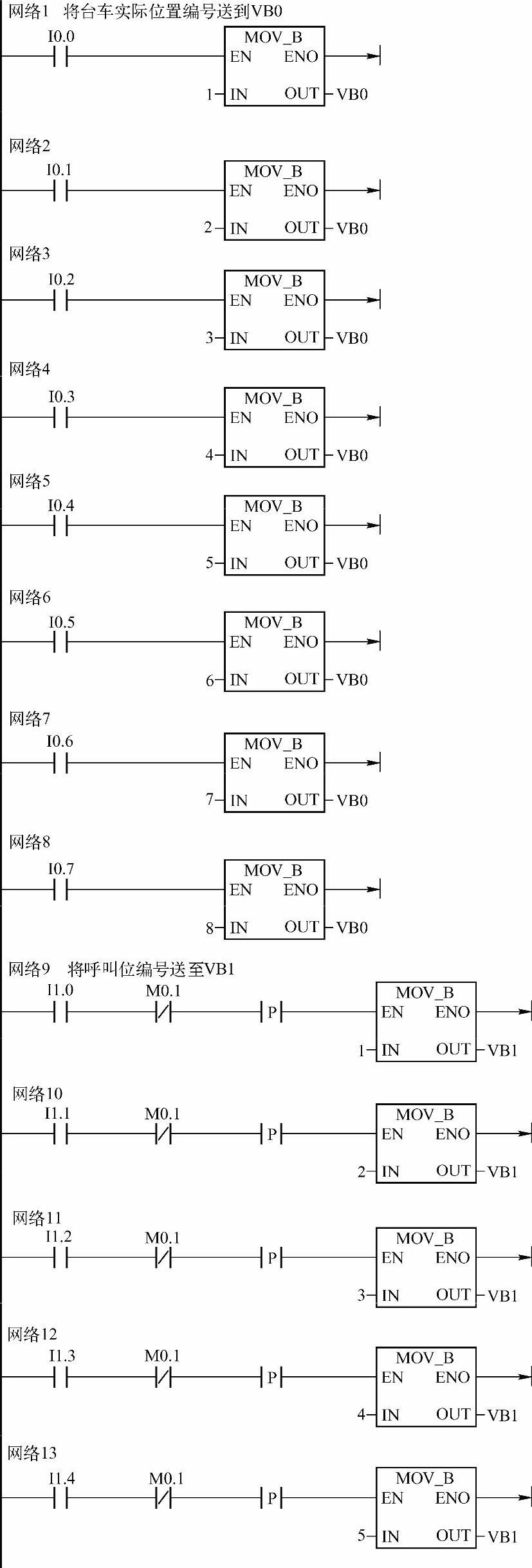
图4-39 呼车控制子程序
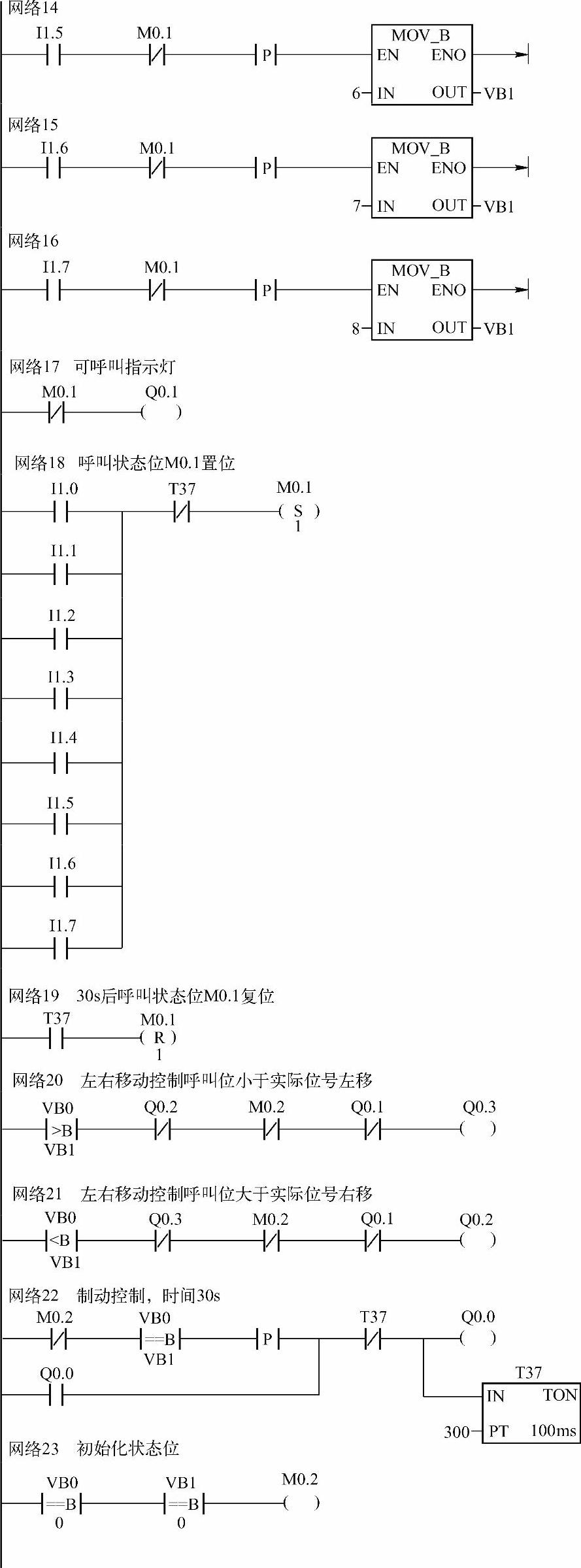
图4-39 呼车控制子程序(续)
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。