



弹簧隔振单质体振动输送机的机构简图如图8-20a所示,图8-20b为计算弯曲振动的力学模型。振动输送机经离散化后,可得到仅有质量而不占几何空间的站(质点)和仅有刚度而无质量的场(梁段)。这里把站的左边点记为L,右边点记为R(见图8-20b),各点的状态向量包括两个位移和两个与之相应的内力,即由挠度y和转角ψ,剪切力Fτ和弯矩M所组成,将其记作

令站的下标由1开始一直到n,而场的下标由2开始一直到n,同时把建立场两端状态矢量之间关系的矩阵叫做场矩阵,把建立站两端状态矢量之间关系的矩阵叫做点矩阵。
取第i个场进行研究(2≤i≤n),该场的受力状态如图8-21所示,图中各量的正、负号的规定与通常材料力学中的规定相同。槽体做自由振动时,该梁段所受的力应满足下列平衡条件:
式中 Li——第i段的长度。
为了求出两个位移,写出任一点x的弯矩公式为

对上式积分,便可得到转角与位移的公式

图8-20 弹簧隔振单质体振动输送机的机构简图
式中 (EI)i——场i的抗弯刚度。
把式(8-57)、式(8-58)、式(8-60)、式(8-61)写成矩阵形式,便有
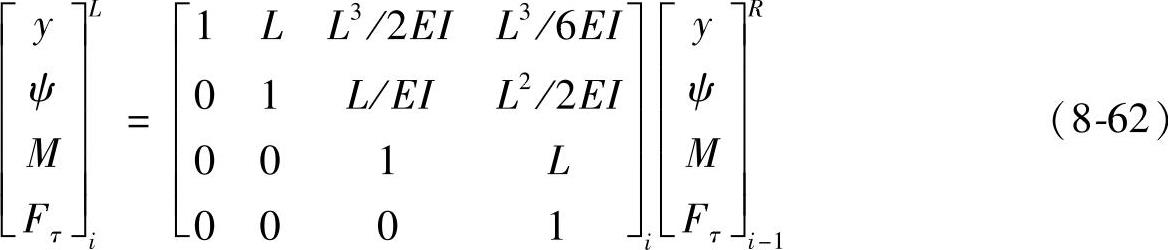
上式可简写为

式中 Fi——场矩阵。
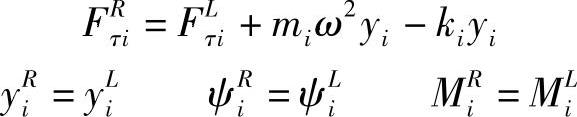
图8-22表示第i站的受力状态,这是一个由无重弹簧支撑的站,站的质量为mi,支撑弹簧刚度为ki。当槽体做自由振动时,mi以角频率ω和振幅yi做简谐运动。根据达朗贝尔原理则有如下关系式:
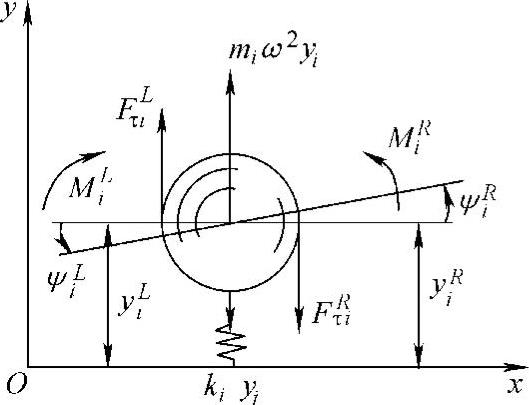
图8-21 场的受力状态图
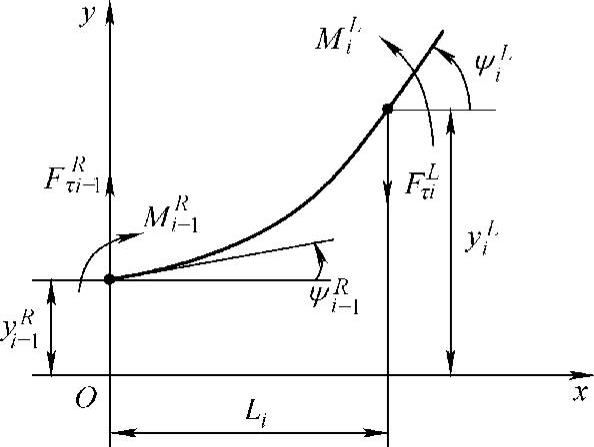
图8-22 第i站的受力状态图(https://www.xing528.com)
将上述关系式写成矩阵形式,便有
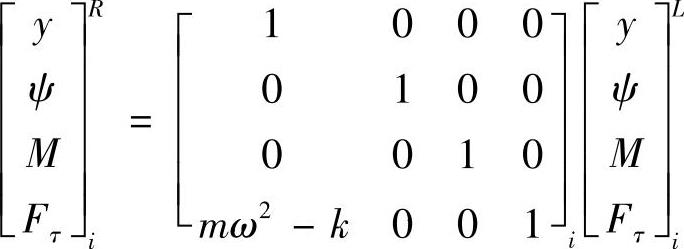
简写为

式中 Pi——第i站的点矩阵。
若该站不受外部约束,则应有ki=0。根据场矩阵和点矩阵的定义,式(8-63)及式(8-64)可直接写出:
ZRn=PnFnPn-1Fn-1…P2F2P1ZL1=AZL1 (8-65)
式中A——4×4阶方阵,称为传递矩阵,A=PnFnPn-1Fn-1…P2F2P1。
根据振动输送机的边界条件,两端为自由端或弹性支撑端,由式(8-60)可知:

式中,a31、a32、a41、a42为矩阵A的元素。由于y1、ψ1取任何值上式都应成立,所以必然有

这是一个终端判据,R是角频率ω的多项式,显然能够满足式(8-67)的ω值,就是振动输送机弯曲振动的固有频率。因此求弯曲振动固有频率的问题,就归结为求方程(8-67)的根。为了求解方程(8-67),本节采用了半步长自动觅根方法。由于振动输送机弯曲振动的固有频率,较一般轴的固有频率低得多(振动输送机的抗弯刚度与其长度之比EI/L较普通轴为小),并且通常只需求最低的几阶固有频率,因此弯曲振动固有频率的求解适合采用这种方法。求解方程(8-67),即R(ω)=0的根,可以分下面两个步骤进行。
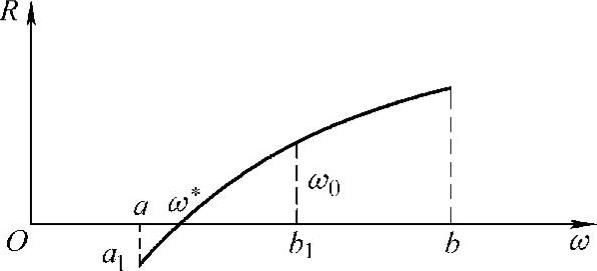
图8-23 半步长自动觅根法
(1)求根的初始近似值 首先选定一个初始值,例如ω=d(d≥0),然后由此初值出发,按某个预选的步长h一步一步地递增(向右移动),并检查每一步的起点ωa和终点ωa+h对应的函数R(ω)值是否同号,如果发现R(ωa)和R(ωa+h)为异号,即
R(ωa)R(ωa+h)<0则所求的根必在ωa与ωa+h之间,于是便可转入自动觅根过程。
(2)求误差小于允许值的根的近似值 设方程R(ω)=0在有根区间内仅有一个根ω∗,取区间中点ω0 ,并检查R(a)和R(ω0)是否同号。若同号,则ω∗在ω0和b之间;若异号,则ω∗在a和ω0之间。于是便得到新的区间(a1,b1),如图8-23所示,如此继续下去便得到ω0、ω1、ω2……序列,其极限即为ω∗,若取ωk为根的近似值,则
,并检查R(a)和R(ω0)是否同号。若同号,则ω∗在ω0和b之间;若异号,则ω∗在a和ω0之间。于是便得到新的区间(a1,b1),如图8-23所示,如此继续下去便得到ω0、ω1、ω2……序列,其极限即为ω∗,若取ωk为根的近似值,则
ε=bk+1-ak+1
求得第一个根之后,在此根的基础上继续按预定步长向右搜索,重复上述两个
过程,即可求得其余诸根。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。