



 打开本文提供的素材文件“安调速器.SLDASM”,启用Simulation插件后,单击“Simulation”工具栏中的“新算例”按钮
打开本文提供的素材文件“安调速器.SLDASM”,启用Simulation插件后,单击“Simulation”工具栏中的“新算例”按钮 ,打开“算例”选择属性管理器,设置算例“类型”为静态,单击“确定”按钮,创建一新的有限元算例,如图9-27所示。
,打开“算例”选择属性管理器,设置算例“类型”为静态,单击“确定”按钮,创建一新的有限元算例,如图9-27所示。
 右键单击“算例”树中的“零件”项,在弹出的快捷菜单中选择“应用材料到所有”菜单项,打开“材料”对话框,为所有零部件选用“普通碳钢”材料,如图9-28所示。
右键单击“算例”树中的“零件”项,在弹出的快捷菜单中选择“应用材料到所有”菜单项,打开“材料”对话框,为所有零部件选用“普通碳钢”材料,如图9-28所示。
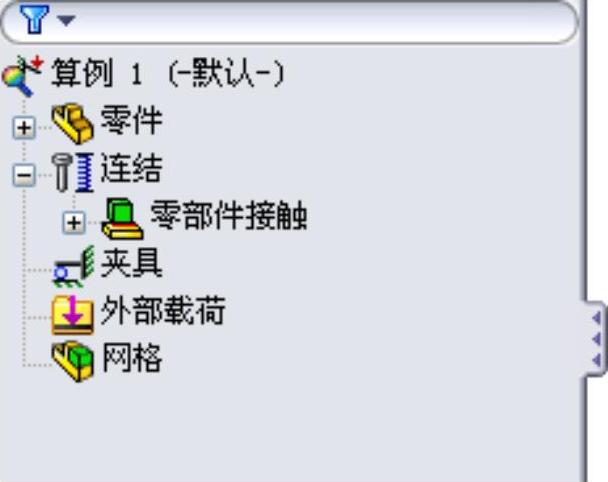
图9-27 添加新算例操作
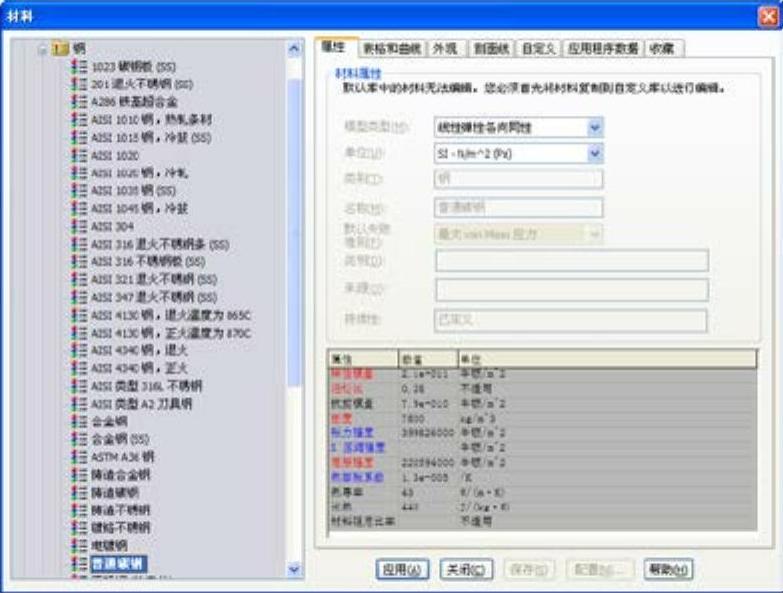
图9-28 设置材料
 右键单击“算例”树中“连接”项
右键单击“算例”树中“连接”项 下的“全局接触”项,选择“编辑定义”快捷菜单项,打开“零部件相触”属性管理器,设置接触“类型”为“无接触”(其原因详见下面“知识点1”),其他选项保持系统默认设置,单击“确定”按钮继续,如图9-29所示。
下的“全局接触”项,选择“编辑定义”快捷菜单项,打开“零部件相触”属性管理器,设置接触“类型”为“无接触”(其原因详见下面“知识点1”),其他选项保持系统默认设置,单击“确定”按钮继续,如图9-29所示。
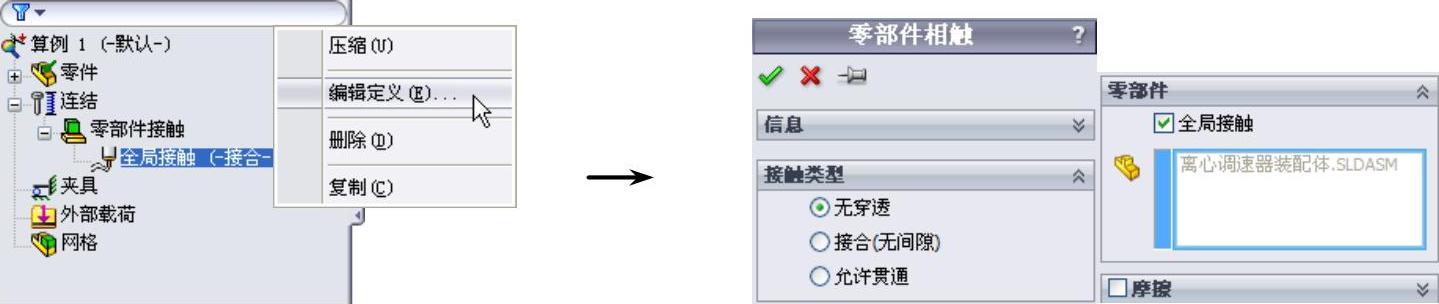
图9-29 设置零部件的接触关系
 右键单击“算例”树中“连接”项
右键单击“算例”树中“连接”项 ,在弹出的快捷菜单中选择“零部件接触”菜单项,打开“零部件相触”属性管理器,设置接触“类型”为“接合”(原因详见“知识点1”),并选择“飞球2”和“臂杆2”,添加此连接关系,如图9-30所示。
,在弹出的快捷菜单中选择“零部件接触”菜单项,打开“零部件相触”属性管理器,设置接触“类型”为“接合”(原因详见“知识点1”),并选择“飞球2”和“臂杆2”,添加此连接关系,如图9-30所示。
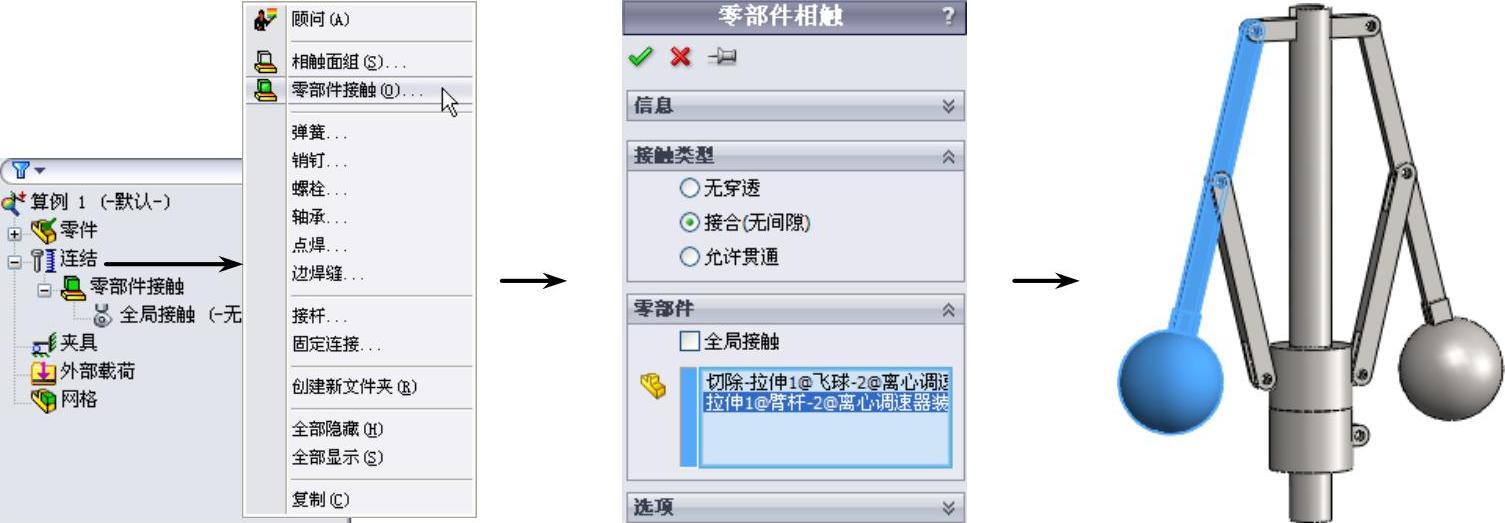
图9-30 设置“接合”接触关系1
 同“步骤4”的操作,右键单击“算例”树中“连接”项
同“步骤4”的操作,右键单击“算例”树中“连接”项 ,在弹出的快捷菜单中选择“零部件接触”菜单项,分别为“飞球1”和“臂杆1”、“立轴”和“横杆”、“轴环”和“轴套”添加“接合”连接关系,如图9-31所示。
,在弹出的快捷菜单中选择“零部件接触”菜单项,分别为“飞球1”和“臂杆1”、“立轴”和“横杆”、“轴环”和“轴套”添加“接合”连接关系,如图9-31所示。
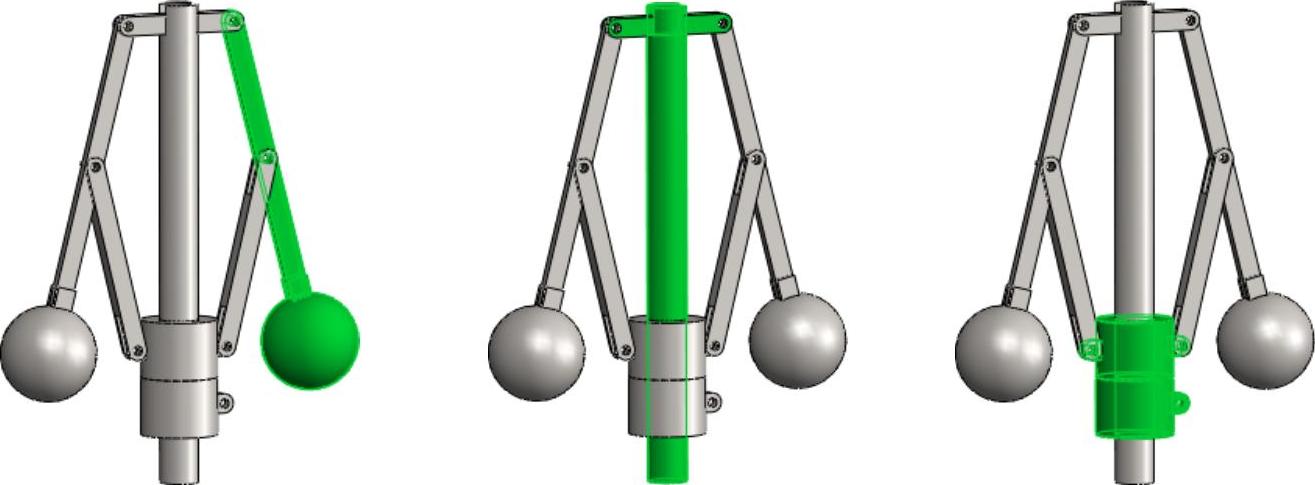
图9-31 设置“接合”接触关系2
 右键单击“算例”树中“连接”项
右键单击“算例”树中“连接”项 ,在弹出的快捷菜单中选择“销钉”菜单项,打开“接头”属性管理器,然后选择“连杆2”和“臂杆2”连接处的圆孔面为对应连接的销钉面,添加销钉连接,如图9-32所示。
,在弹出的快捷菜单中选择“销钉”菜单项,打开“接头”属性管理器,然后选择“连杆2”和“臂杆2”连接处的圆孔面为对应连接的销钉面,添加销钉连接,如图9-32所示。
 同
同 操作,为“连杆1”和“臂杆1”、“连杆2”和“轴环”、“连杆1”和“轴环”连接处的圆孔面分别添加3个销钉连接,如图9-33所示。
操作,为“连杆1”和“臂杆1”、“连杆2”和“轴环”、“连杆1”和“轴环”连接处的圆孔面分别添加3个销钉连接,如图9-33所示。
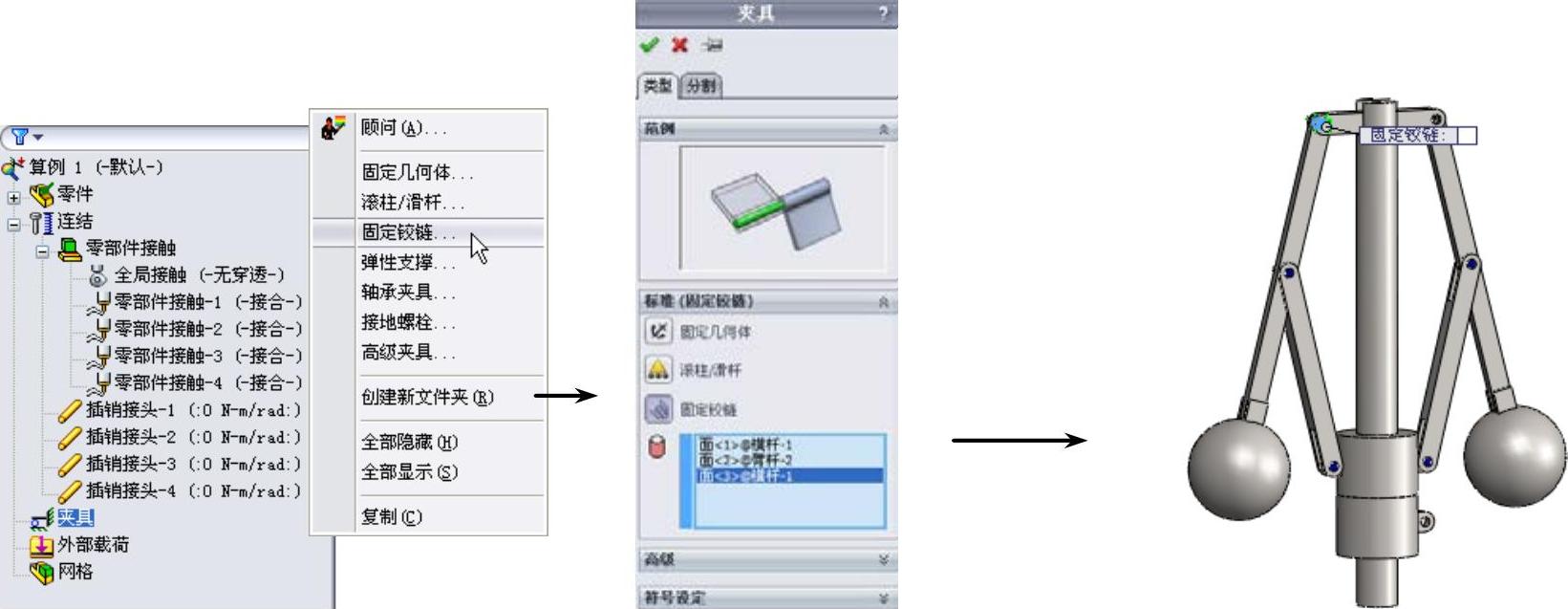
 右键单击“算例”树中“夹具”项
右键单击“算例”树中“夹具”项 ,在弹出的快捷菜单中选择“固定铰链”菜单项,打开“夹具”属性管理器,然后选择“臂杆2”和“横杆1”连接处的圆孔面为对应连接的固定铰链面,添加铰链约束,如图9-34所示。
,在弹出的快捷菜单中选择“固定铰链”菜单项,打开“夹具”属性管理器,然后选择“臂杆2”和“横杆1”连接处的圆孔面为对应连接的固定铰链面,添加铰链约束,如图9-34所示。
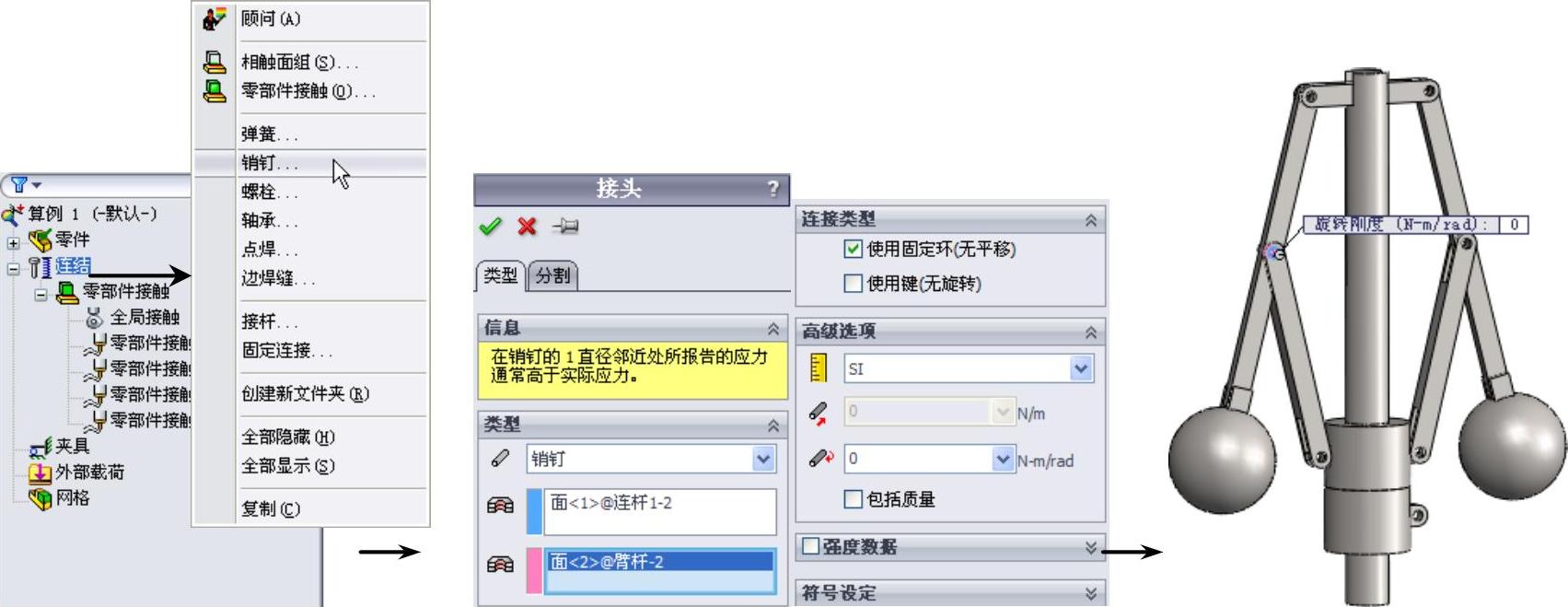
图9-32 添加“销钉”连接关系1

图9-33 添加“销钉”连接关系2
 (https://www.xing528.com)
(https://www.xing528.com)
图9-34 添加“固定铰链”夹具1
 同
同 操作,选择“臂杆1”和“横杆1”连接处的圆孔面添加铰链约束,如图9-35所示。
操作,选择“臂杆1”和“横杆1”连接处的圆孔面添加铰链约束,如图9-35所示。
 右键单击“算例”树中“夹具”项
右键单击“算例”树中“夹具”项 ,在弹出的快捷菜单中选择“高级夹具”菜单项,打开“夹具”属性管理器,选择“在圆柱面上”按钮,选择“立轴”柱面,并选中“径向”和“轴”按钮,添加此高级约束,如图9-36所示。
,在弹出的快捷菜单中选择“高级夹具”菜单项,打开“夹具”属性管理器,选择“在圆柱面上”按钮,选择“立轴”柱面,并选中“径向”和“轴”按钮,添加此高级约束,如图9-36所示。
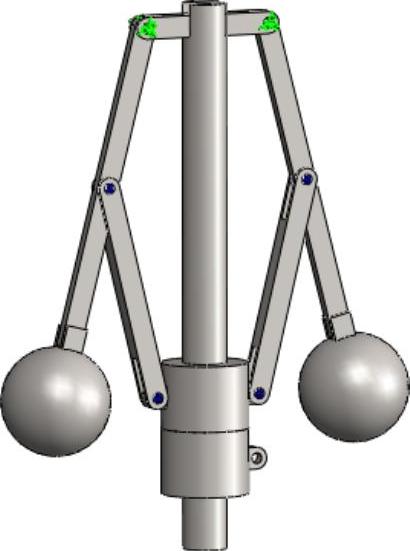
图9-35 添加“固定铰链”夹具2
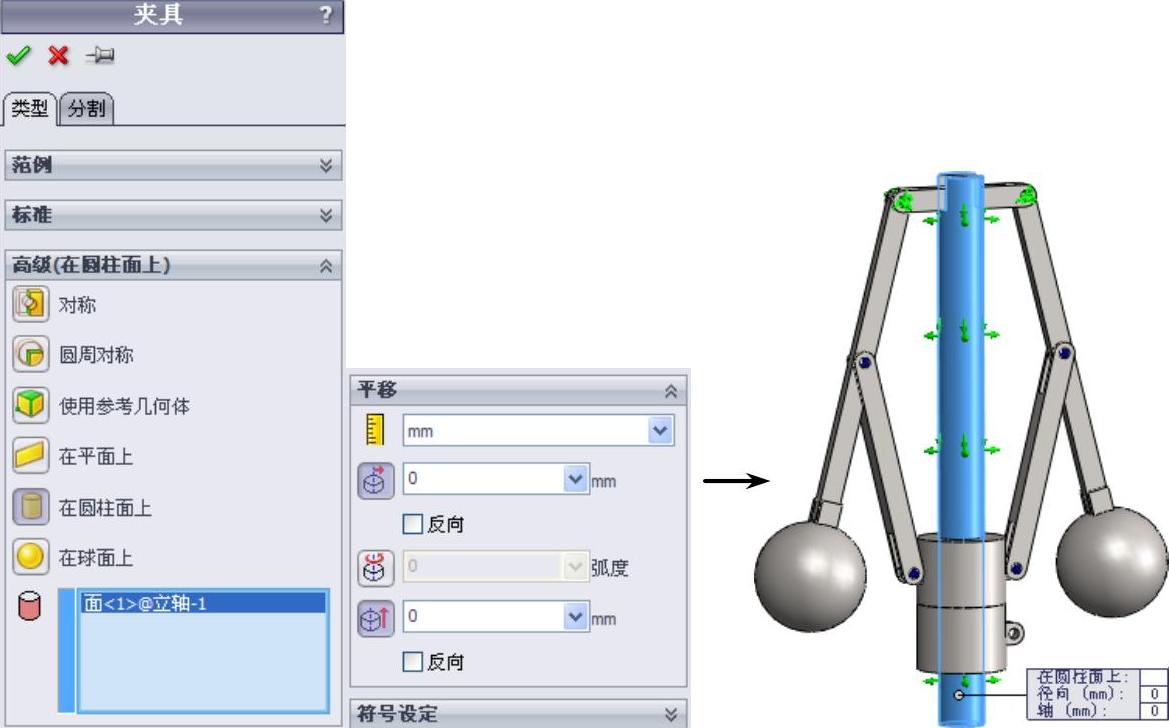
图9-36 设置“在圆柱面上”夹具操作
 右键单击“算例”树中“外部载荷”项
右键单击“算例”树中“外部载荷”项 ,在弹出的快捷菜单中选择“引力”菜单项,打开“引力”属性管理器,然后选择“前视基准面”为参考面,添加一“引力”外部载荷,如图9-37所示。
,在弹出的快捷菜单中选择“引力”菜单项,打开“引力”属性管理器,然后选择“前视基准面”为参考面,添加一“引力”外部载荷,如图9-37所示。
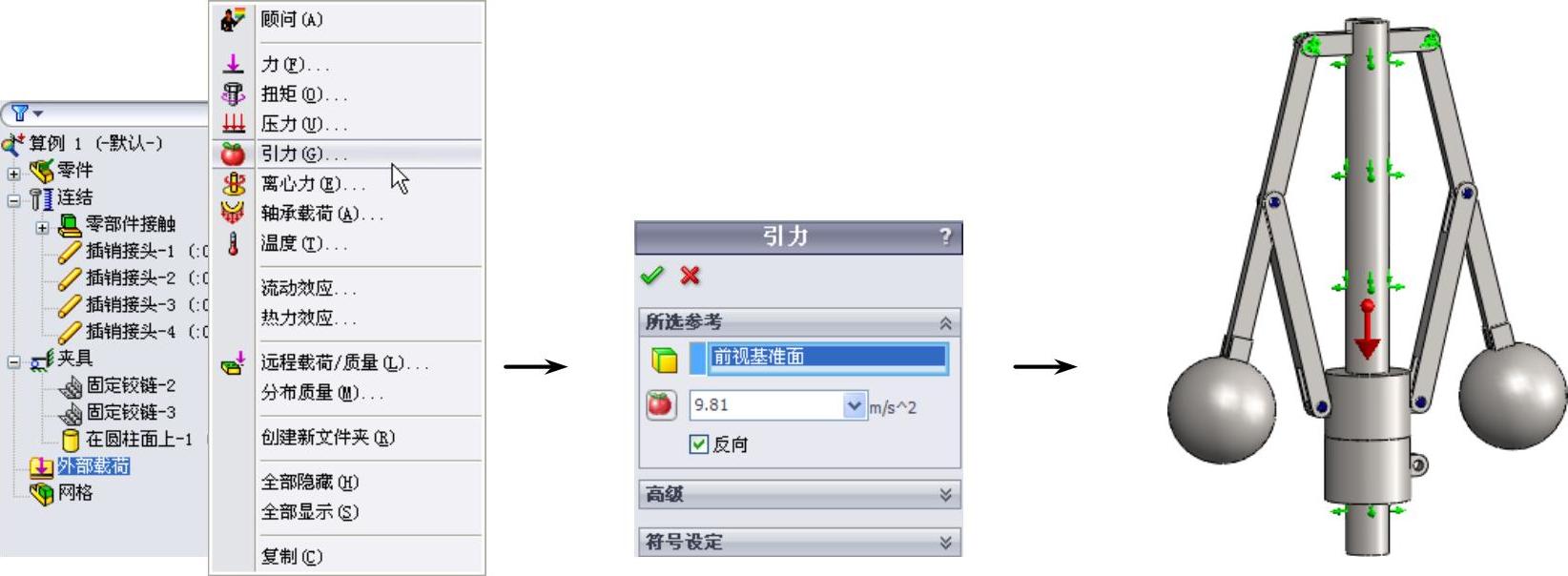
图9-37 添加“引力”载荷操作
 继续右键单击“算例”树中“外部载荷”项
继续右键单击“算例”树中“外部载荷”项 ,在弹出的快捷菜单中分别选择“离心力”菜单项和“力”菜单项,打开其属性管理器,并分别选择“立轴”的柱面和轴环的上部面为受力面,大小分别为150r/s和2N,添加两个载荷,如图9-38所示。
,在弹出的快捷菜单中分别选择“离心力”菜单项和“力”菜单项,打开其属性管理器,并分别选择“立轴”的柱面和轴环的上部面为受力面,大小分别为150r/s和2N,添加两个载荷,如图9-38所示。
 右键单击“算例”树中的“网格”项
右键单击“算例”树中的“网格”项 ,在弹出的快捷菜单中选择“生成网格”菜单项,使用默认值划分网格,然后右键单击“算例”树中的“算例1”项
,在弹出的快捷菜单中选择“生成网格”菜单项,使用默认值划分网格,然后右键单击“算例”树中的“算例1”项 ,选择“运行”按钮,进行仿真分析,如图9-39所示(对出现的对话框,全部选择“否”)。
,选择“运行”按钮,进行仿真分析,如图9-39所示(对出现的对话框,全部选择“否”)。
 右键单击“算例”树中“结果”中的“位移1”项,在弹出的快捷菜单中选择“显示”菜单项,显示零部件的位移有限元分析图例,从图例中可知,模型中最大位移为127mm,如图9-40所示,但是此值并非轴套的移动距离,所以需要继续进行操作。
右键单击“算例”树中“结果”中的“位移1”项,在弹出的快捷菜单中选择“显示”菜单项,显示零部件的位移有限元分析图例,从图例中可知,模型中最大位移为127mm,如图9-40所示,但是此值并非轴套的移动距离,所以需要继续进行操作。

图9-38 添加“离心力”和“力”载荷操作
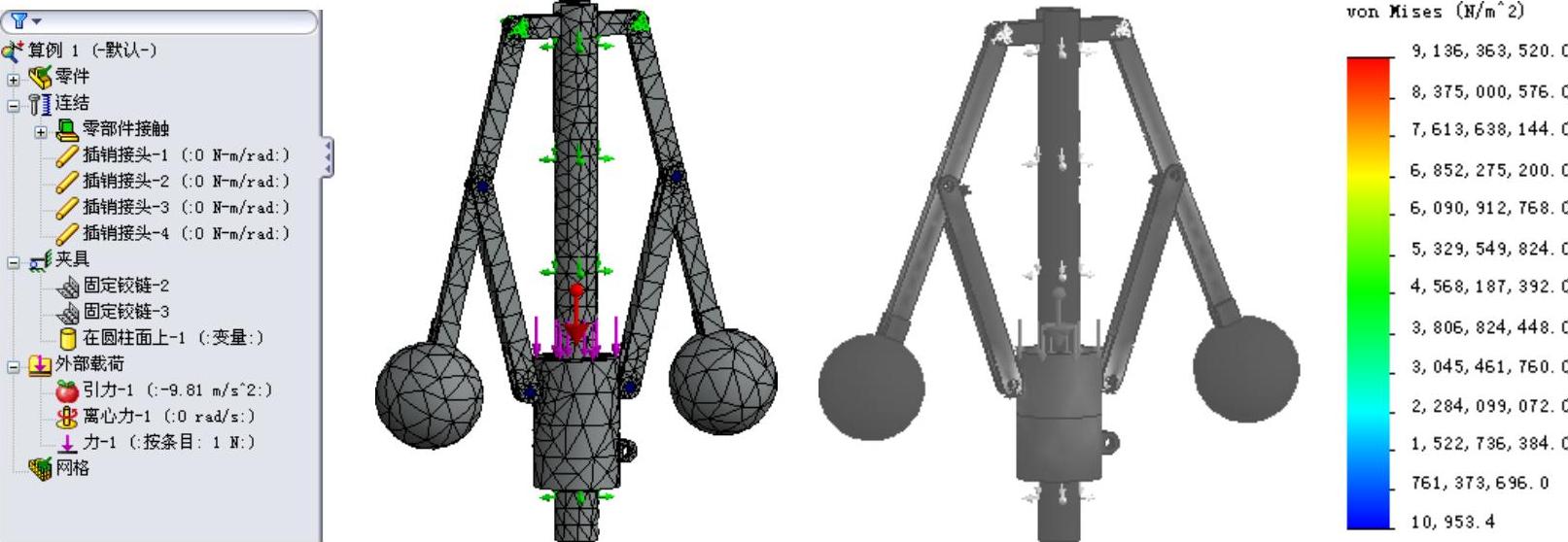
图9-39 划分网格并进行分析操作
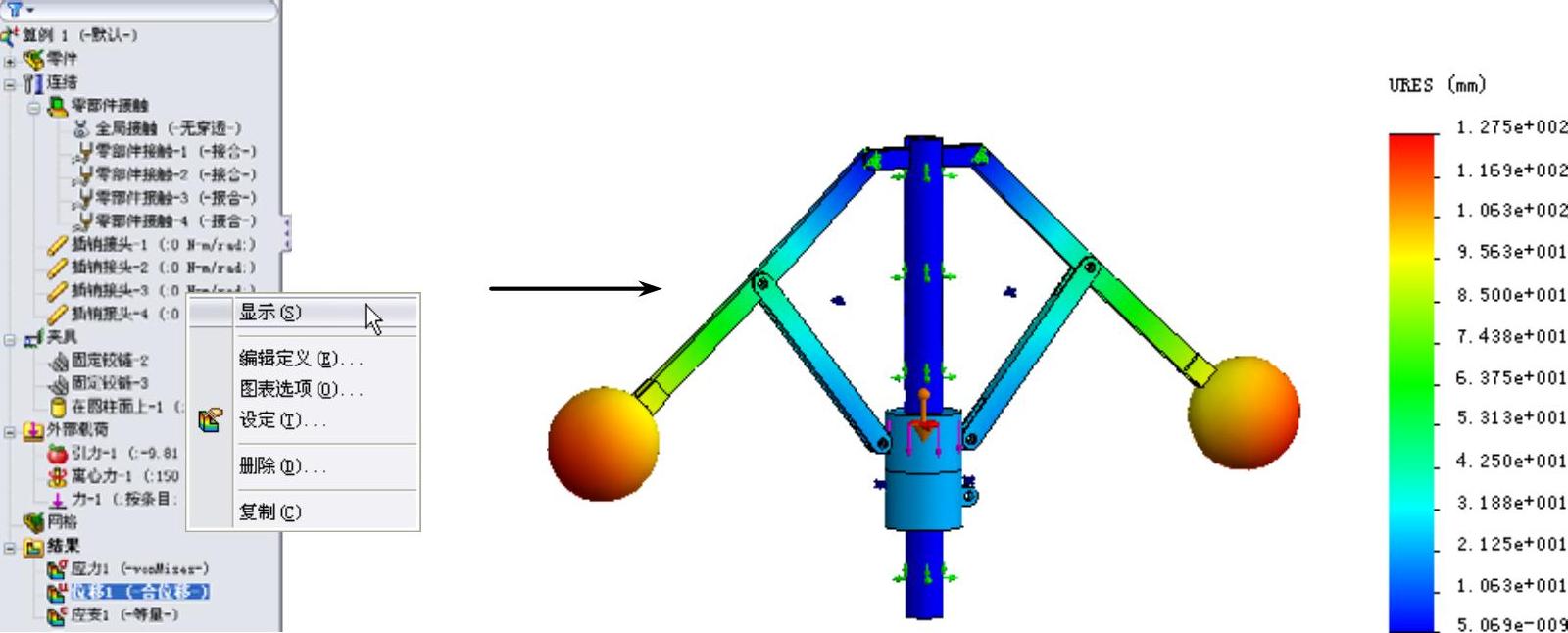
图9-40 查看位移操作
 右键单击“算例”树中“结果”中的“位移1”项,在弹出的快捷菜单中选择“探测”菜单项,打开“探测结果”属性管理器,选择“轴套”底部边线,可在“探测结果”对话框以及图例的提示对话框中获得“轴套”的移动距离为21.7mm,符合设计要求,如图9-41所示。
右键单击“算例”树中“结果”中的“位移1”项,在弹出的快捷菜单中选择“探测”菜单项,打开“探测结果”属性管理器,选择“轴套”底部边线,可在“探测结果”对话框以及图例的提示对话框中获得“轴套”的移动距离为21.7mm,符合设计要求,如图9-41所示。
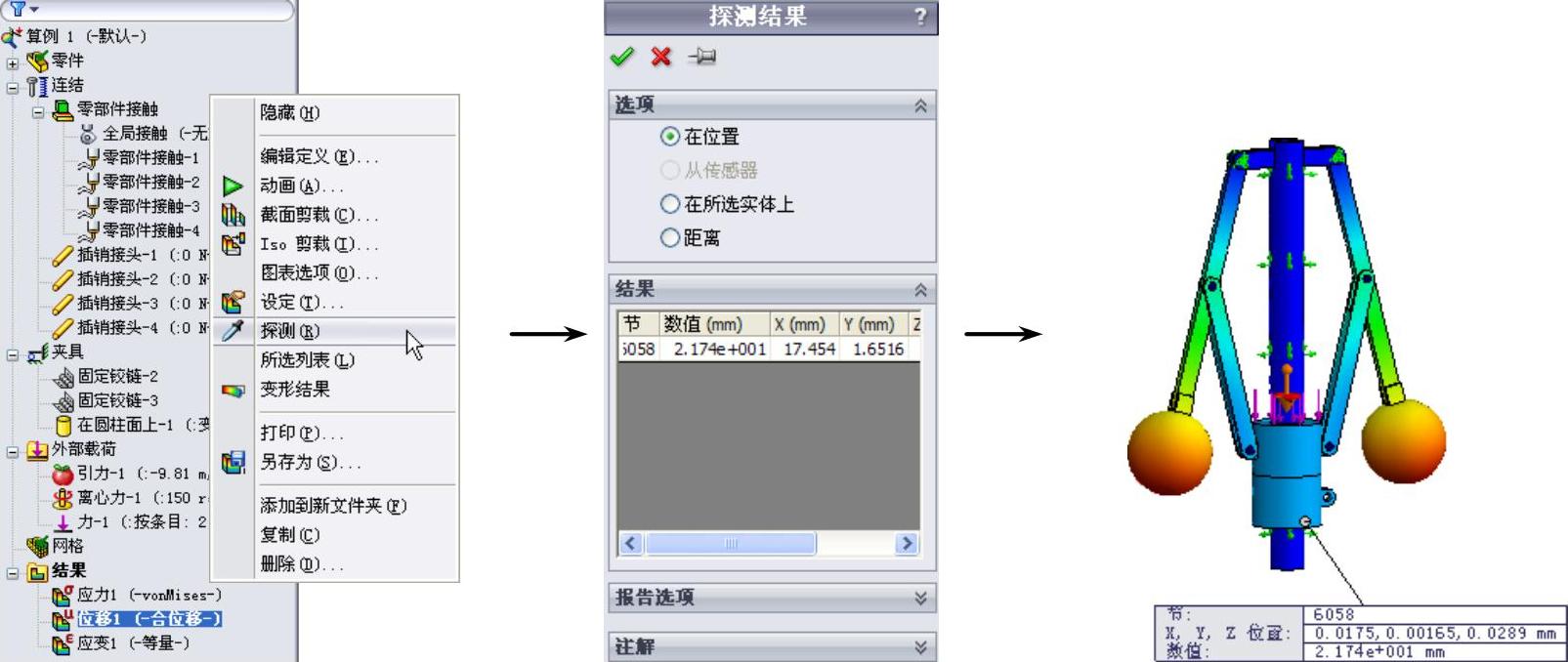
图9-41 探测位移操作
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。