



力士乐公司在LUDV系统中设置了负载传感分流器,以克服普通负载传感控制系统的缺点,其主要作用是保证在供油不足时所有执行元件的工作速度按比例下降,以获得与负载压力无关的控制。负载传感控制(LS)系统与负载传感分流器控制(LUDV)系统的工作原理分别如图7-17和图7-18所示。
如图7-18所示,LUDV系统中的压力补偿阀位于节流孔A1和A2之后,故LUDV系统又称为带次级压力补偿阀的负载传感控制系统。在图7-17中,两个执行元件的负载压力分别传感到各自换向阀的压力补偿阀,其中较高的压力经梭阀再传送到变量泵。而在图7-18中,最高负载压力不但传送到变量泵中,也传送到各个压力补偿阀。图7-17中采用的是基于定差减压原理的压力补偿阀,而图7-18中采用的是基于比例溢流原理的流量分配型压力补偿阀,最高负载压力作为比例控制信号传递给所有的压力补偿阀;同时负载传感控制器也在最高负荷压力作用下,对液压泵的排量进行控制,使泵的输出压力高出最高负载压力一个固定值。这样,所有的多路阀阀口的压降都被控制在同一值。即使泵出现供油不足的情况,执行机构的速度会下降,但由于所有阀口的压降是一致的,各工作机构的工作速度还会按阀的开口面积保持比例关系,从而保证挖掘机动作的准确性。在一般情况下,LS系统、LUDV系统的工作性能基本相同,但当执行元件所需流量超过泵输出流量极限时,LUDV系统中各节流孔压差Δp始终保持相等,流量总是与节流孔面积成正比,所有执行元件将以同一比率减速,并能独立平稳地工作,保持驾驶人预定的工作运动轨迹,而与负载和泵流量大小无关。
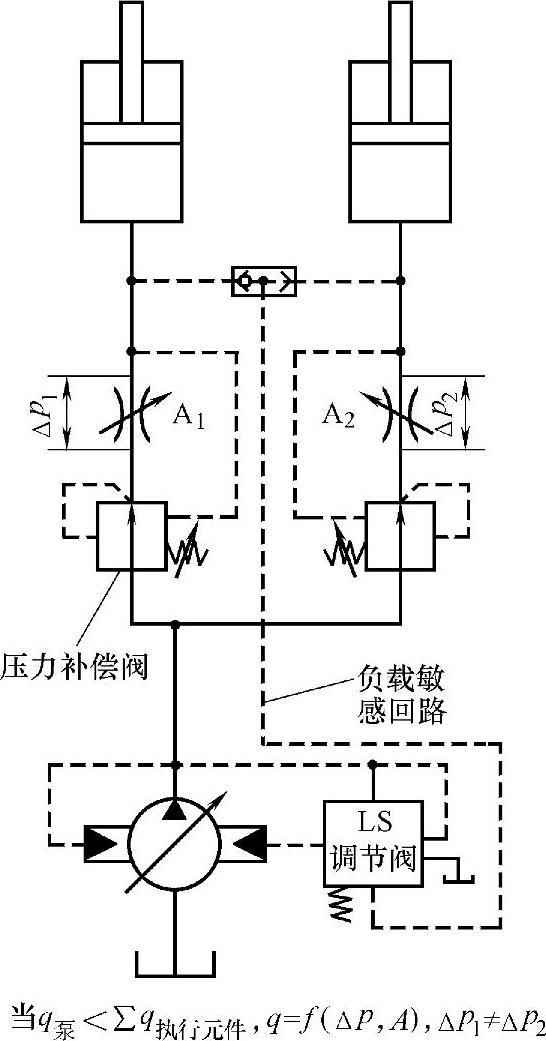
图7-17 负载传感控制(LS)系统的工作原理(https://www.xing528.com)
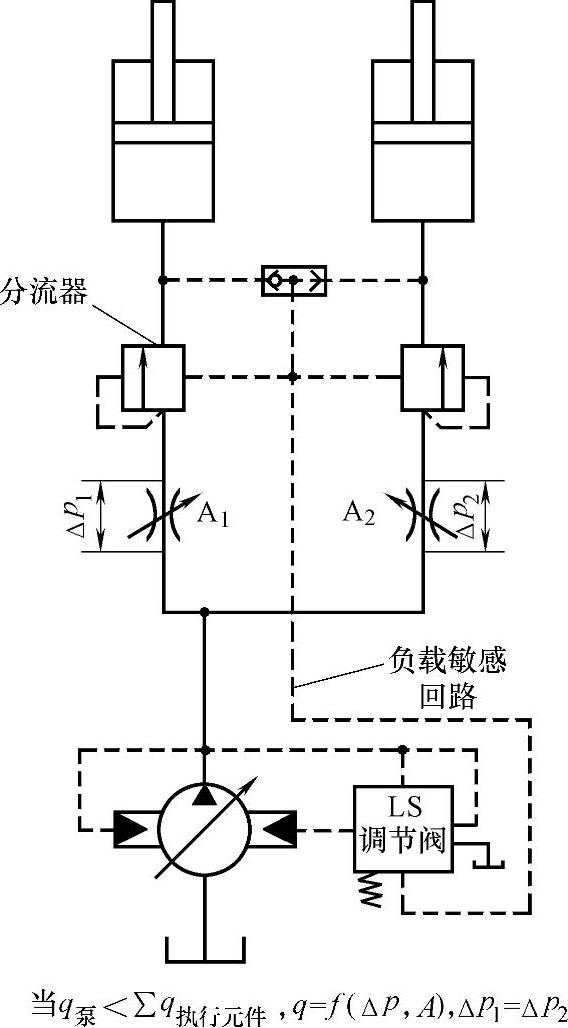
图7-18 负载传感分流器控制(LUDV)系统的工作原理
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。