



在介绍LUDV负载传感控制系统之前,先了解一下普通的负载传感控制系统。20世纪90年代以来,负载传感控制系统开始应用到液压挖掘机上,通常其组成是变量泵、中闭式负载传感多路阀、卸荷阀、压差传感器及电气控制几部分,其控制阀无论在中位是开式还是闭式,都附有压力补偿阀。负载传感控制系统由负载传感控制阀和负载传感控制泵两个部分组成。
与传统的液压系统相比较,负载传感控制系统具有以下几个优点:
1)能量消耗小。采用负载传感变量系统,泵能够根据负载的情况对自身的排量进行调节,由压差传感器检测负荷压力,通过泵阀控制器发出指令,根据负载的需求调节液压泵排量,使泵输出压力始终比负载压力高出不大的恒定值,从而保证液压泵输出功率与负载相适应,减小能量损失。
2)流量控制精度高,不受负载压力变化的影响。
3)能实现对不同负载压力的多个执行元件同时进行快速和精确的控制,各个执行元件互不干涉。泵控负载传感控制系统图如图7-16所示。
1.负荷传感控制阀的基本原理
负荷传感控制阀的基本原理为伯努利流量方程:

式中 Cd——流量常数;
A——阀开口面积;(https://www.xing528.com)
Δp——阀口前后压差。
通过调定Δp的值为常数,则流量q只与阀的开口面积有关,而与负载压力无关。而Δp的值是通过压力补偿阀来实现的(图7-16),其中压力补偿阀的弹簧决定了节流口处压降Δp的值。
2.负载传感控制泵的基本工作原理
变量泵的变量机构根据来自LS口的负载压力可自动地对泵的斜盘摆角进行调节,从而控制泵的流量始终等于执行元件所需流量。当负载压力升高时,泵的斜盘摆角自动调小,泵的流量减小。反之,泵的斜盘摆角增大,输出流量变大。
3.负载传感控制系统的缺点
在液压挖掘机系统中采用负载传感控制,为了保证工作正常,泵输送的压力必须与最高负载压力相适应,即负载传感控制只在最高负载回路中起作用,而对其他负载压力较低的回路采用压力补偿,以使阀口压差保持定值。阀口全打开,使工作系统要求的流量超过泵的供油能力的极限时,最高负载回路上的执行元件速度会迅速降低直至停止,从而使挖掘机失去复合动作的协调能力。
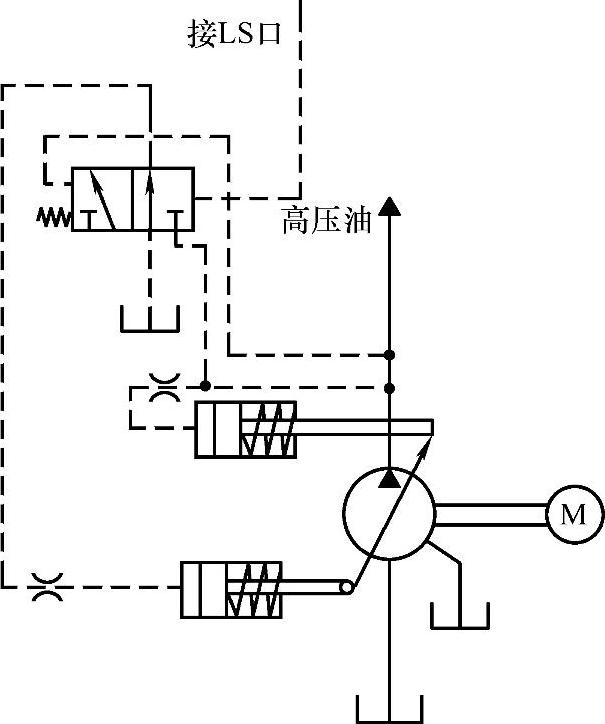
图7-16 泵控负荷传感控制系统图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。