



【摘要】:马达排量根据系统压力变化在最小至最大排量之间自动调节,属于与高压相关的开环排量控制。表5-1 压力补偿控制TACAXA、XB油口之间的压差:最小压差Δpmin=0.05MPa,最大压差Δpmax=5MPa。电磁换向阀6的控制方式也必须为外部电气控制信号,控制信号应基于马达旋向及表5-2中的相关信息。表5-2 压力补偿控制TAD*
马达排量根据系统压力变化在最小至最大排量之间自动调节,属于与高压相关的开环排量控制。调节器控制起始点在最小排量处,调节器控制终止点在最大排量处,调节器控制起始点设置范围为11~37MPa。
从调节器控制起始点(最小排量处)到最大排量处(控制终止点)的控制压力斜坡升幅小于1MPa,这样可以确保马达在整个排量范围内能量的充分利用,其控制原理和特性曲线如图5-27所示。
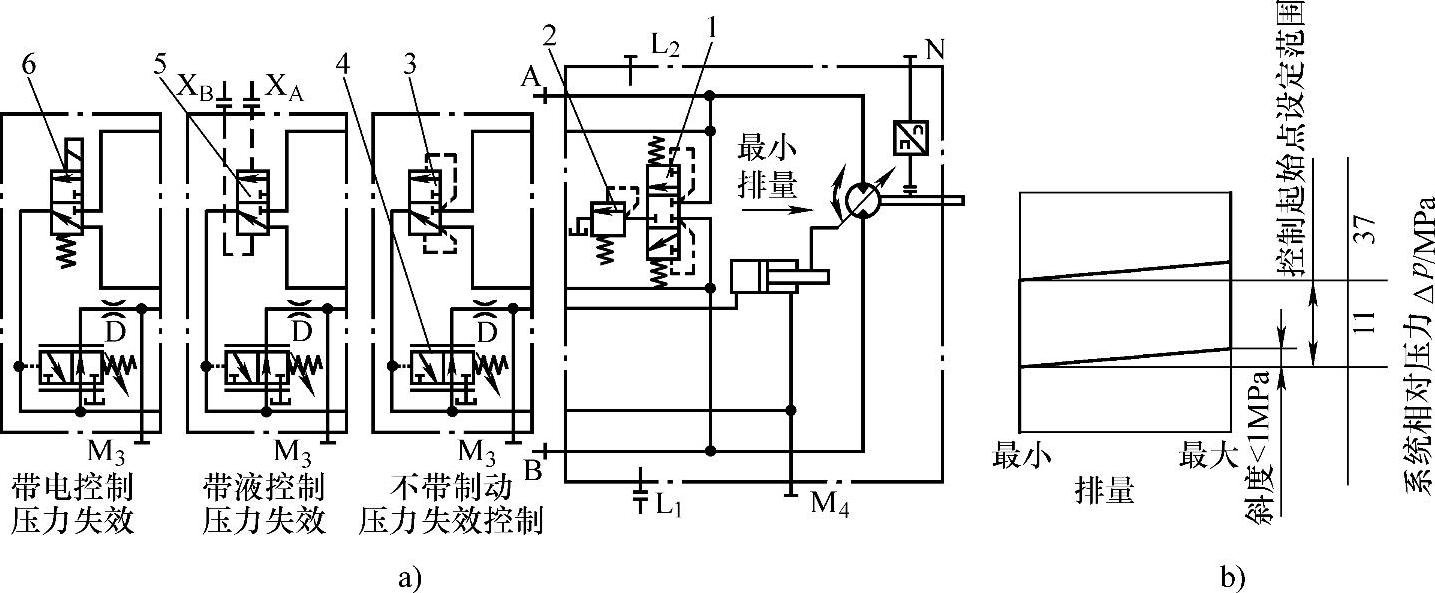
图5-27 控制特性TA**
a)控制原理 b)特性曲线
1—冲洗阀 2—冲洗溢流阀 3—梭阀 4—压力补偿控制伺服阀 5—液控换向阀 6—电磁换向阀 A、B—主压力油口 L1、L2—壳体回油口 M3、M4—伺服压力测压口 XA、XB—制动压力失效控制油口 D—阻尼孔 N—速度传感器
在压力补偿控制伺服阀4前的液控换向阀5或电磁换向阀6可以防止压力补偿器在减速(马达工作于泵工况)时起作用,此系统构造可防止车辆/机器减速时突然制动或制动失控。液控换向阀5的控制方式必须为外部双油路控制,控制信号应基于马达旋向及表5-1中的相关信息。(https://www.xing528.com)
表5-1 压力补偿控制TACA

XA、XB油口之间的压差:最小压差Δpmin=0.05MPa,最大压差Δpmax=5MPa。
电磁换向阀6的控制方式也必须为外部电气控制信号,控制信号应基于马达旋向及表5-2中的相关信息。
表5-2 压力补偿控制TAD*

免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。