



HD1D型变量调节是在HD型液压控制的基础上增加了一台压力切断阀7而成的,如图5-3所示。当液压马达工作压力低于切断压力设定值时,压力切断阀7处于左位机能,此时压力切断阀7仅相当于伺服阀1与变量缸6大腔之间的一段油液通道,液压马达完全受先导压力的控制。当液压马达工作压力升高,达到切断压力设定值时,压力切断阀7将处于中位机能位置,此时,变量缸无杆腔油路被封闭,液压马达将保持当前的排量。当液压马达工作压力继续升高,压力切断阀7将处于右位机能位置,使变量缸无杆腔与低压油路接通,变量缸6活塞将在小腔压力油的作用下向右移动,使液压马达排量增大。
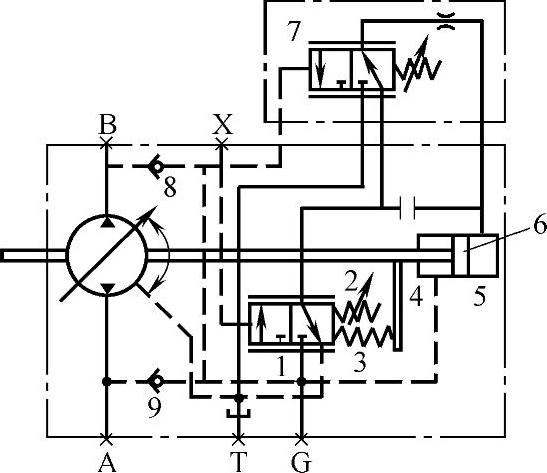
图5-3 HD1D型液压控制原理图
1—伺服阀 2—调压弹簧 3—反馈弹簧 4—反馈杆 5—变量缸 6—变量缸活塞 7—压力切断阀 8、9—单向阀
如果由于负载转矩的缘故或由于液压马达摆角减小而造成系统压力升高,在达到恒压控制的设定值时,液压马达摆向较大的摆角。由于增大排量导致压力减小,控制器偏差消失。随着排量的增加,液压马达产生较大的转矩,而压力保持常值,此值的大小可通过改变压力伺服阀1上弹簧的预压缩量确定。(https://www.xing528.com)
液压马达的输出转矩是根据负载的需要而决定的,即对于一个确定的负载来说,所需的马达转矩也是确定的,而液压马达输出转矩是其排量与进出口压差的乘积,在液压马达工作压力高于切断压力设定值的情况下,伺服阀1一直处于右位机能,液压马达排量持续增大,直到液压马达工作压力下降到与切断压力设定值相等,压力切断阀7回到中位机能位置,液压马达停止变量。当外部负载减小时,液压马达的控制过程与上述过程相反,这里不再赘述。总之,液压马达的压力切断控制功能就是根据外部负载的变化自动改变液压马达排量,从而使液压马达的工作压力保持在设定范围之内。
先导压力控制与压力切断控制之间的关系是:先导压力控制和压力切断控制不能同时对液压马达起控制作用,在液压马达工作压力低于切断压力设定值时,液压马达将完全由先导压力来控制;当液压马达工作压力达到切断压力设定值后,液压马达将由压力切断阀自动控制。
这种具有压力切断功能的先导压力控制变量柱塞马达,将人工控制和自动控制有机地结合起来,克服了传统变量马达单一控制方式的缺点,提升了主机系统的操控性能和安全性能,从而提高了工作效率。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。