



A8VO变量双泵配有采用了斜轴设计的两个轴向柱塞旋转组件,用在开式回路中进行液压传动。双泵共用一个壳体是A8VO液压泵的主要特性,其直接与发动机连接的安装方式降低了元件本身对主机安装空间的要求,摆脱了多元传动系统对分动箱的依赖。早期的A8VO泵只有机械连接的总功率和分功率两种用双弹簧调节的恒功率调节装置。20世纪80年代,德国Rexroth公司开发出运用力矩平衡原理的杠杆摇臂式双曲线功率调节器,并逐渐增加了多种控制调节装置,如交叉调节、压力切断。双曲线功率调节器的工作曲线几乎是条理想的双曲线,理论上没有功率损失,因此又被推广到A7VO、A11VO等泵上。然而,近年工程机械节能和电子化的发展,使得诸如极限负载调节大受青睐。极限负载调节使用在由多个泵组成的系统中,发动机无需功率储备,即使在变化的工作条件下,发动机功率也能得到充分利用。采用极限负载调节后,弹簧功率调节器所引起的功率损失能自动得到补偿,从而使昂贵的双曲线功率调节器成为没有必要。由于A8VO泵正越来越多地与极限负载调节结合起来,所以在双曲线功率调节器使用近20年以后,最新的A8VO泵又回归到使用成本较低的弹簧功率调节器。新的A8VO控制装置是一种简洁而多功能的装置,它以LA分功率调节为中心,可以液压连接而组合为总功率调节,可以通过液压或电子极限负载调节改变泵的设定功率,也可以通过液压外控,进行排量的负控制或正控制。
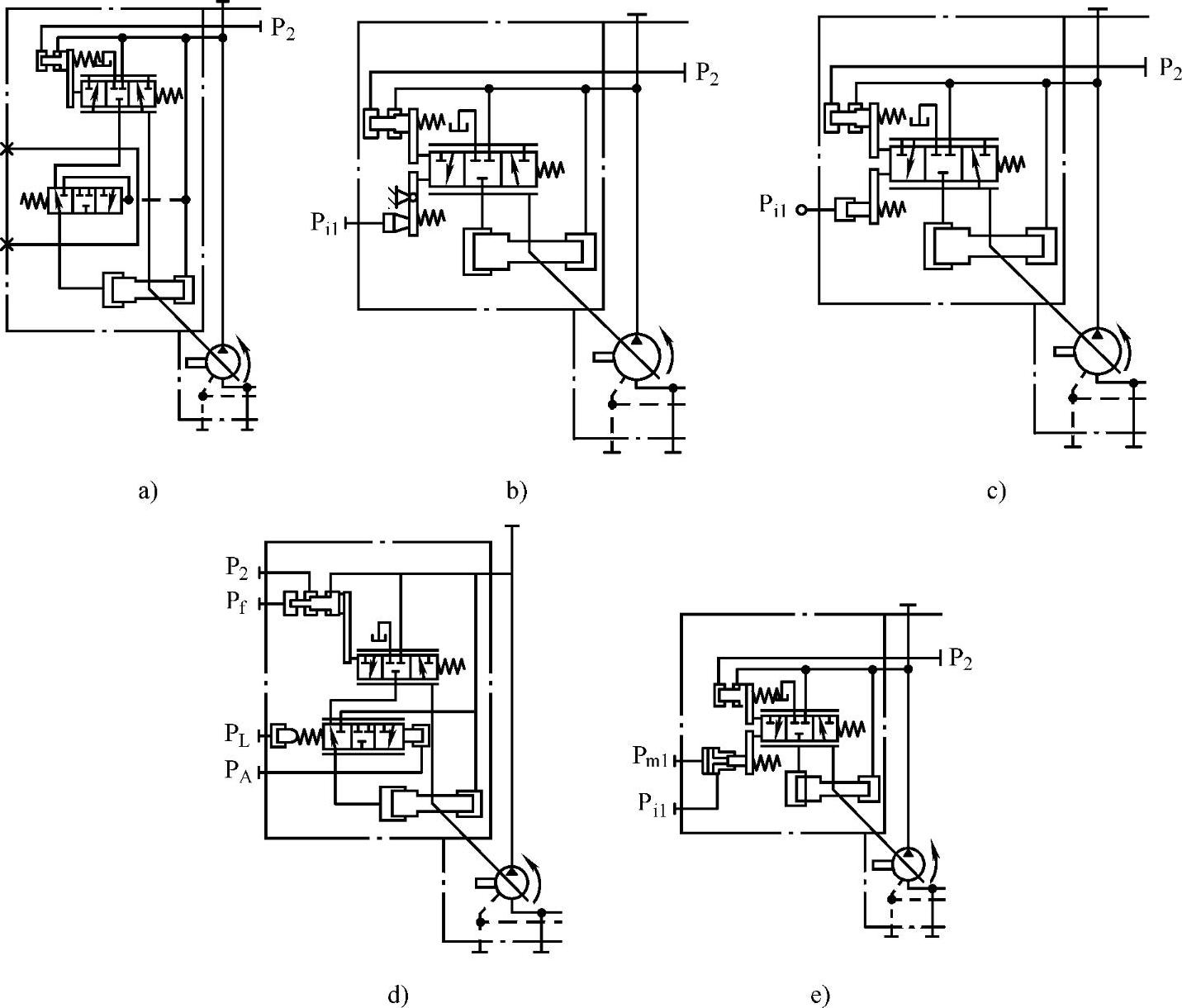
图3-52 川崎泵的其他控制方式
a)总功率控制+压力切断 b)总功率控制+正流量控制 c)总功率控制+负流量控制 d)负载敏感控制+总功率控制+变功率控制 e)负流量控制+总功率控制+二级最大流量控制
1.A8VO恒功率控制原理
德国Rexroth公司的A8VO变量泵选择了双弹簧位移-力反馈控制方式,其控制原理与结构如图3-53a所示。图3-53b所示为A8VO变量泵的恒功率控制特性曲线。
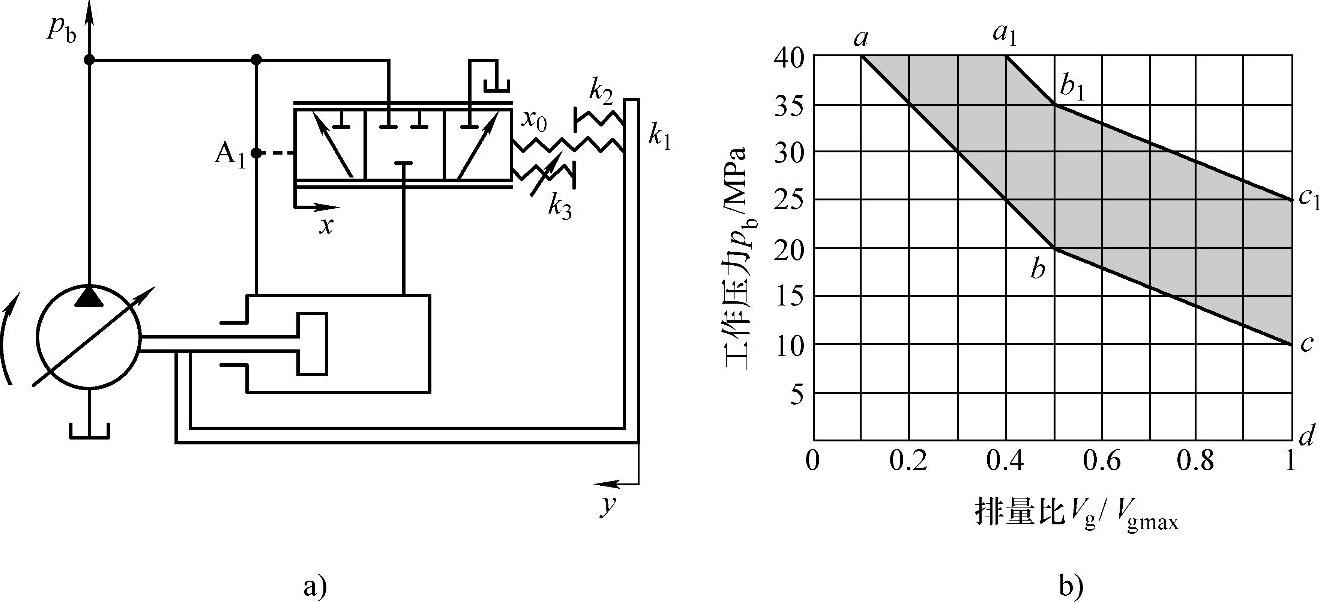
图3-53 A8VO双弹簧位移-力反馈控制
a)双弹簧位移-力反馈控制原理与结构 b)A8VO变量泵恒功率控制特性曲线
由控制方式原理(图3-53)可知,该控制方式的恒功率控制是通过三个弹簧来实现的,其中刚度为k1、k2的弹簧是两个变量弹簧;而另外一个刚度为k3的弹簧就是用来设定变量泵恒功率值的。弹簧k1、k2的安装位置不同,在被压缩过程中,弹簧k1一开始就会被压缩,而弹簧k2只有在弹簧k1已经被压缩了x0的位移后才会被压缩,即两者在有效行程上相差一个x0的位移。由控制特性曲线可知,其近似为双曲线,图中两条曲线为不同控制起点(c,c1)条件下的控制特性,改变弹簧k3的压缩量便可在曲线abc与a1、b1、c1之间得到不同的控制特性。
以曲线abc为例分析研究A8VO变量泵恒功率动态调节过程:在起始状态下,变量泵位于排量最大状态;在泵的出口压力低于预设的起调压力之前,变量泵一直位于最大排量状态,即此过程变量泵在控制曲线的dc段工作;当变量泵出口压力增加到大于弹簧k1设定的起调压力值时,变量控制阀阀芯右移,其左位工作,此时变量调节缸无杆腔与变量泵的出口压力接通,变量活塞在两腔差动作用下开始朝左滑动,变量泵排量将会降低。在变量控制阀芯右移与变量活塞左移的过程中,弹簧k1被压缩,故曲线cb段的斜率由弹簧k1决定。若负载压力继续增加,当弹簧k1被压缩x0的有效位移时,弹簧k2也开始进入压缩状态,由于弹簧k1、k2的共同作用,曲线斜率增大,进入bc段。若负载压力继续增加,变量泵便工作在恒压状态下,输出一个最小排量,此时泵处于压力切断控制状态。在变量泵排量减小的过程中,弹簧k1或者弹簧k1、k2被压缩的同时,变量控制阀阀芯右移也压缩弹簧k3,当变量控制阀阀芯两端的作用力平衡时,变量泵的输出流量在该负载压力下达到稳定状态。
由上述分析可以看出,这种恒功率控制系统,随着负荷变动,变量泵自动改变排量,具有响应快的优点,但存在以下不足之处:
1)泵控制特性(即p-q特性)一般是由液压和弹簧作用来实现的,不能得到理想的恒功率曲线,而是用折线来近似等功率双曲线,存在近似误差,特别是按照某一恒功率曲线设计的弹簧用于某一范围恒功率调节时,误差将更大。
2)发动机的输出功率是随着转速的变化而变化的,而这种恒功率变量泵是通过调节变量弹簧的预紧力(如图3-53中的弹簧k3)来调节泵的吸收功率的,只能设定一个或几个固定的值。这种恒功率控制系统,在不同油门开度下不能充分利用发动机功率。
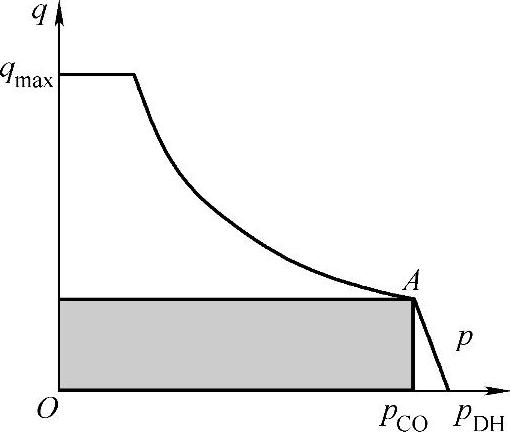
图3-54 压力切断
压力切断控制技术是A8VO恒功率变量泵普遍采用的技术。压力切断控制的主要作用是避免系统因为压力大而造成相关损害,同时压力切断可以完全避免系统在过载状态下的溢流损失(图3-54)。首先在系统中预设一个压力的极限值(pCO),当由于故障或其他原因,使得变量泵的出口压力大于此预设值时,压力切断功能使得变量泵排量沿图3-54中的A-pDH线降到接近零排量(对应压力为pDH),而输出压力仍保持在系统压力附近,因此这种功能又称为“压力补偿”(PressureCompensated),此时的排量只用于泵的内部泄漏。压力切断阀类似于系统中的安全阀,它的设定值一般高于系统正常运行压力10%左右。
2.独立功率控制器(分功率控制)LA0、LA1
在带有独立功率控制器LA0/LA1的变量双泵上,两台泵之间没有机械连接,即每台泵都装有单独的功率控制器。功率控制器根据系统工作压力来控制泵的排量,从而使泵不会超过规定的输入功率。
LA0:不带功率越权控制的独立功率控制器;LA1:带有通过先导压力进行功率越权控制的独立功率控制器。其中LA0分功率控制原理图如图3-55所示。
针对各个控制器的功率设定值可单独调整并且可以不同;每个泵可以设置为100%的输入功率。由图3-55可知,两个变量单泵1和2分别各有一套功率调节机构3。每个变量单泵输出流量只和自身回路压力相关,而不受对方回路压力的影响,即两个变量单泵相互独立地按照各自的控制特性曲线进行功率调节。分功率控制方式是将发动机的输出功率平均分配给两台泵,每台泵分到发动机输出功率的一半,两台泵之间没有相互作用,独立工作。但是这种控制方式容易产生一个问题,即其中一台泵获得的功率太大但是另一台却太小。
使用两个测量弹簧调节使泵输出近似为双曲线的功率特性。工作压力相对于测量弹簧和外部可调节弹簧作用在功率调节差压控制活塞的测量表面,外部可调节弹簧决定了功率设置值。
如果液压力总和超过弹簧力,就将控制流体供应给控制活塞,比例方向阀右位工作,变量调节缸无杆腔接通泵出口,差动作用使泵朝排量减小的方向移动,从而减少流量;与此同时,变量缸活塞又压缩弹簧,使恒功率调节器的控制活塞和比例方向阀复位,实现了行程反馈。当泵的压力继续升高时,上述过程再次重复,泵的输出流量进一步减少。未受到压力时,泵在复位弹簧的作用下摆回初始位置(Vgmax)。
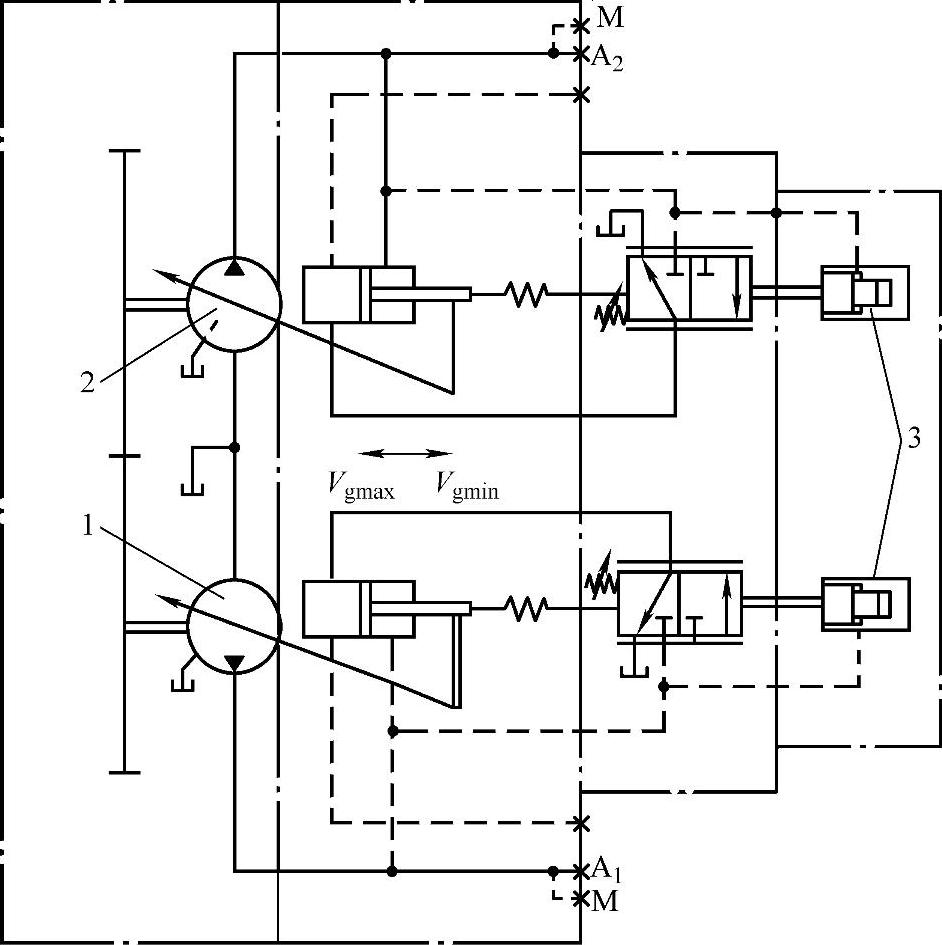
图3-55 LA0型分功率控制原理图
1—主泵1 2—主泵2 3—功率调节机构
带先导压力越权的LA1分功率控制原理图如图3-56所示,外部先导油压力(油口X3)作用于恒功率控制器6差压活塞的第三个测量表面,从而使设置功率减小(负功率越权控制)。使用不同先导压力可以改变机械设置基本功率。这表示可以有不同的功率设置。如果先导压力信号通过负载限制控制进行可变控制,则液压功率的总和等于输入功率。极限负载控制(也有称之为负载限制控制、极限功率控制)的原理是通过检测发动机掉速情况来调节变量泵变量机构。当电控系统检测到发动机的转速下降超过某一数值时,主动调节液压泵的吸收转矩,来保持发动机转速的相对稳定,这一过程通常是通过降低液压泵的排量来实现的,控制液压泵排量负功率越权控制的先导压力由图3-56中的电磁比例减压阀3的压力确定,控制电磁比例减压阀的电子信号必须通过外部电子控制器产生,当转速传感器检测到发动机转速下降设定数值时,将控制器输出到电磁比例减压阀的电流值减小,作用在恒功率控制调节器环形面的压力减小,最终使液压泵的排量变小,降低泵的吸收转矩,从而使发动机转速恢复到额定点附近。
极限功率控制可减小负载的变化对发动机转速的扰动,消除发动机的功率储备,维持输出转矩的相对稳定,提高发动机功率的利用率。
如无功率越权,则油口X3应与油箱相连。
A8VOLA0/LA1型恒功率变量泵的压力-流量特性如图3-57所示,阴影部分由于控制初始值的改变,使该泵的功率调节有一定的范围。
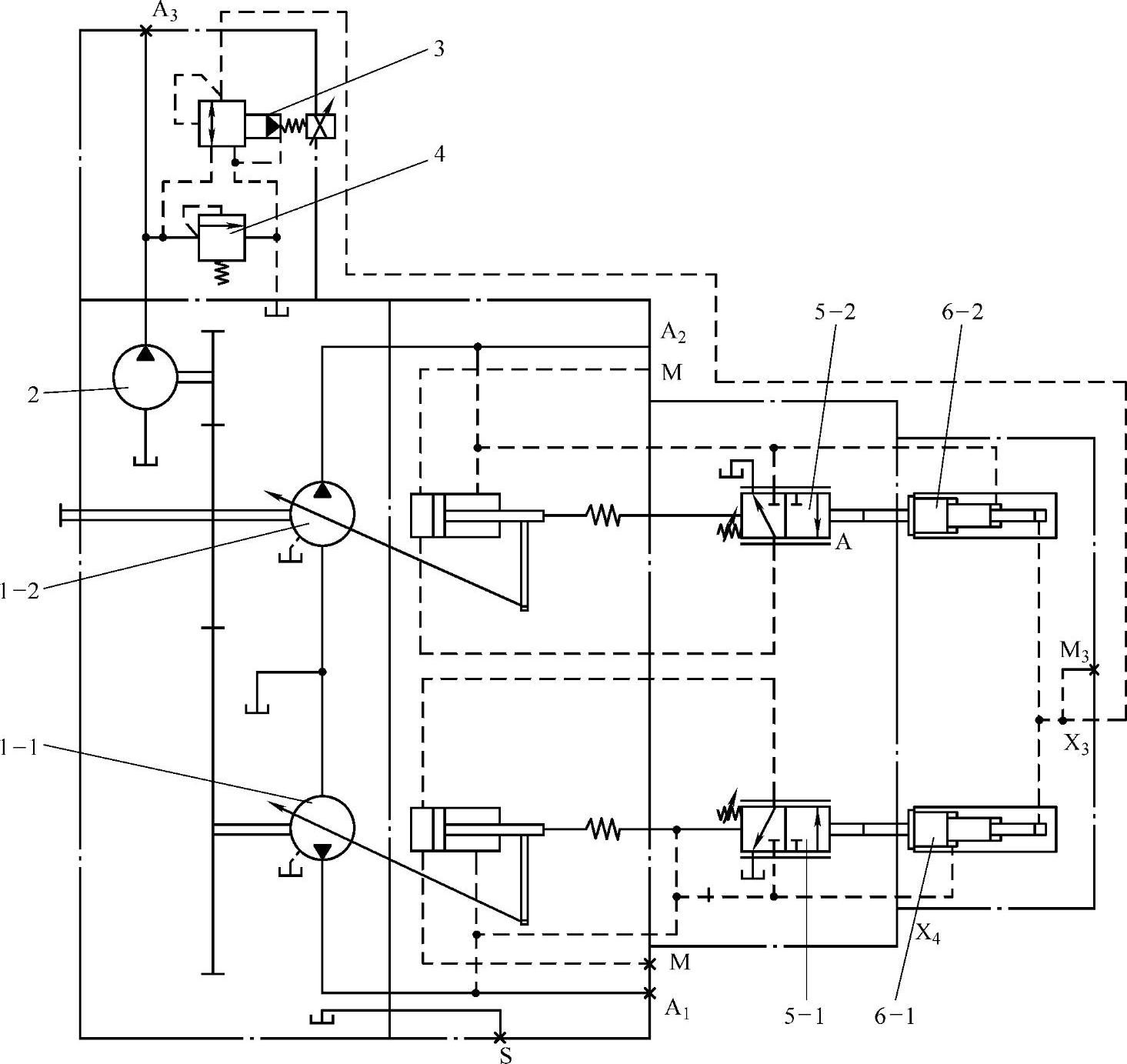
图3-56 LA1型分功率控制原理图
1—主泵 2—辅助泵 3—电磁比例减压阀 4—溢流阀 5—功率调节阀 6—恒功率控制调节器
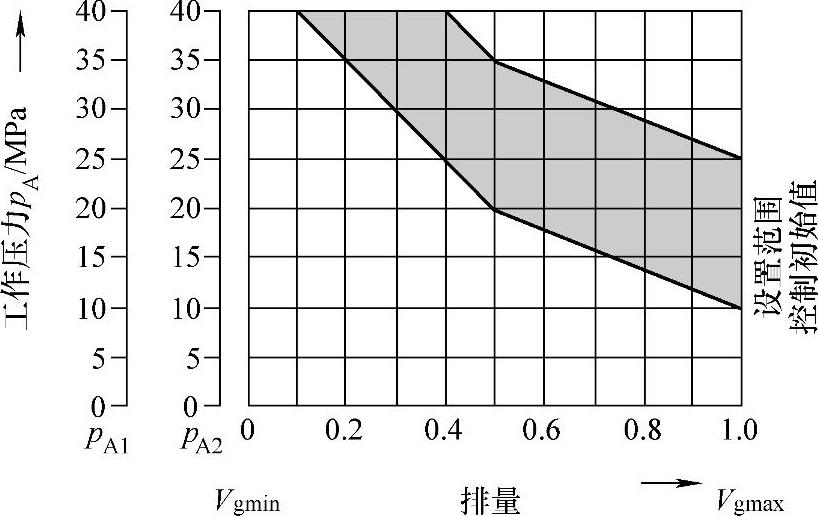
图3-57 A8VOLA0/LA1型恒功率变量泵的压力-流量特性
3.带有液压行程限位器的独立功率控制器LA0H、LA1H
如图3-58所示,液压行程限位器8使排量在Vgmax至Vgmin的整个控制范围内无级可变。排量的设置与作用于油口X1(最高44MPa)的先导压力pst成比例。功率控制器优先于液压行程限位器,即低于功率控制器特性时,根据先导压力调节排量。如果设置流量或工作压力超过了功率控制器特性,则功率控制器优先于行程限位器,并随着弹簧特性减小排量。油口X3一般接负载限制控制。
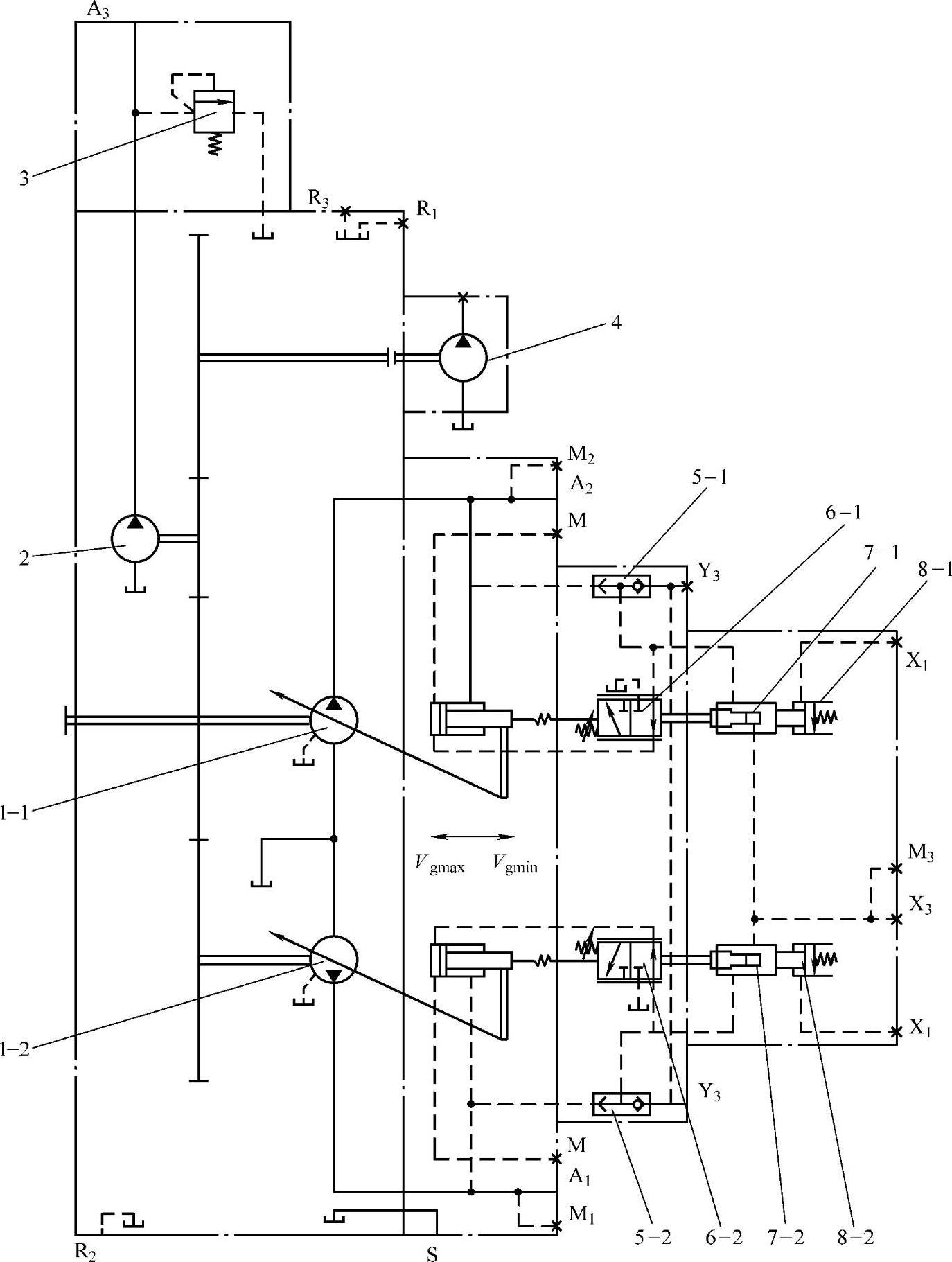
图3-58 LA1H2油路图
1—主泵 2—2号辅助泵 3—溢流阀 4—3号辅助泵 5—梭阀 6—功率调节阀 7—恒功率控制调节器 8—液压行程限位器
(1)液压行程限位器(负流量控制)LA0H1/3、LA1H1/3 随着先导压力的增加,泵调节至较小排量,控制范围从最大排量Vgmax到最小排量Vgmin,控制起点在Vgmax,可设定范围为0.4~1.5MPa,控制起点取决于功率控制器设置。卸压状态的初始位置为最大排量Vgmax。LA0H1/3、LA1H1/3先导压力与排量之间的关系曲线如图3-59所示。
使用LA0H1/LA1H1时的注意事项是:所需控制压力≥3MPa。可以从高压管路获得所需的控制流体。当使用负控制方向阀时,控制压力通过高压管路从负控制系统获得。先导压力越大,排量越小。
使用LA0H3/LA1H3时的注意事项是:所需控制压力≥3MPa。所需的控制压力来自高压管路或施加在油口Y3的外部控制压力≥3MPa。当使用标准的开芯式方向阀时,必须使用外部控制压力供应进行该控制。先导压力增量Δp约为2.5MPa。
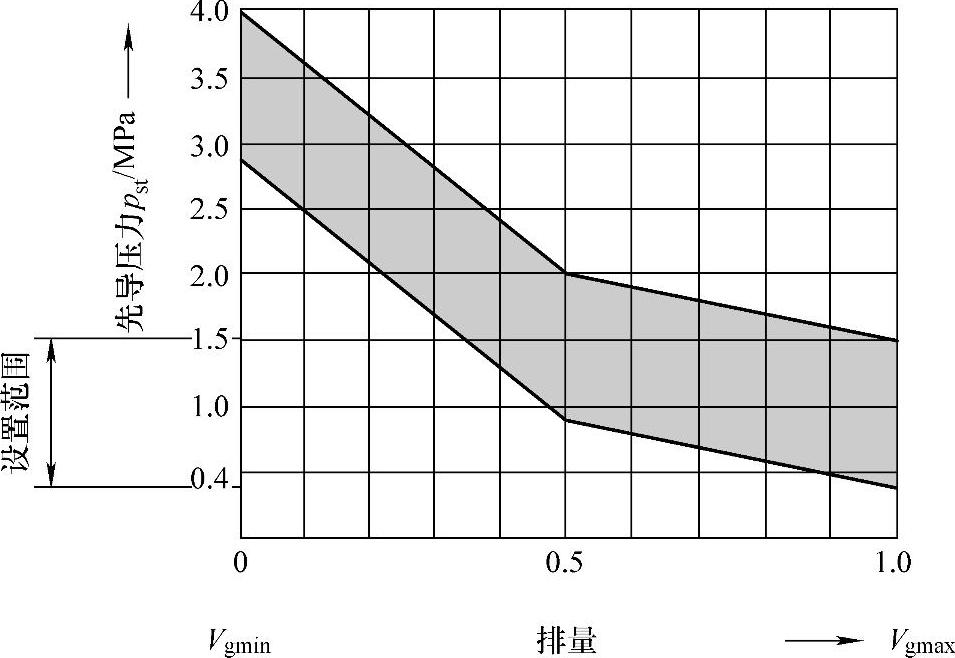
图3-59 LA0H1/3、LA1H1/3先导压力与排量之间的关系曲线
(2)液压行程限位器和外部先导油压力供应(正流量控制) LA0H2、LA1H2随着先导压力的增加,泵调节至较大排量,控制范围从Vgmin到Vgmax。控制起点在最小排量Vgmin,可设定范围为0~1.5MPa,卸压状态的初始位置在最大排量Vgmax。为了从Vgmax到Vgmin进行控制,需要的压力需≥3MPa。所需的液压油来自高压管路或施加在油口Y3的外部控制压力(≥3MPa)(先导压力<控制起点)。先导压力增量Δp约为2.5MPa。LA0H2、LA1H2先导压力与排量之间的关系曲线如图3-60所示。
液压行程限制器的外部压力供应控制方式采用的是正流量控制,正流量控制具有的主要特点是:操纵多路换向阀的先导压力不仅用来控制换向阀的阀口开度,同时还被引至变量泵的变量机构来调节排量。待机时,泵只输出用来维持系统泄漏的流量。通过推拉先导手柄,系统中的先导液压回路会建立与之对应的先导压力来控制阀口开度,进而控制泵的排量,由此可知泵的输出流量与先导压力成正比。
主泵的正控制功能可根据不同的流量需求,由主控制器发出不同的信号,对应着X1口不同的先导控制压力,也对应着不同的主泵排量。这样一系列先导控制压力值和主泵排量值就形成了主泵的正控制特性曲线,如图3-60所示。(https://www.xing528.com)
注意:如果有油口Y3(H2+H3),必须总是将其连接至外部控制压力。如果没有外部控制压力供应,此口应接至油箱卸压。
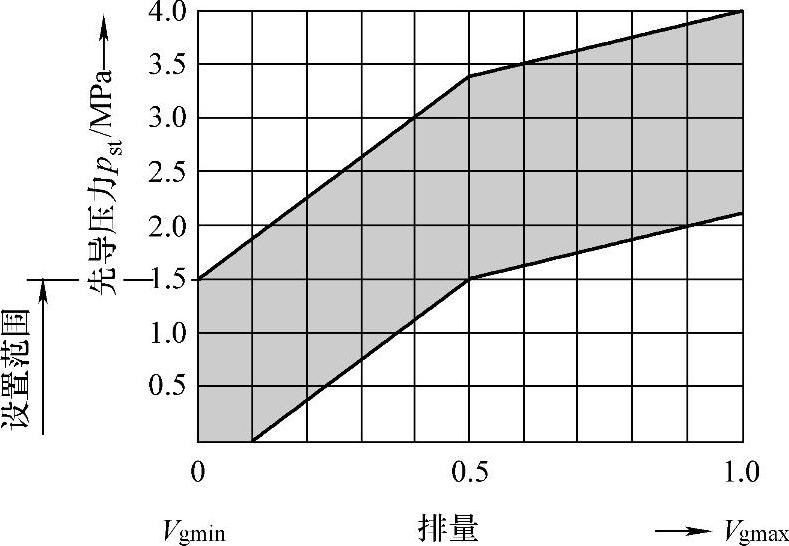
图3-60 LA0H2、LA1H2先导压力与排量之间的关系曲线
4.带液压连接的分功率控制(交叉功率控制方式)LA0K、LA1K
图3-61所示为A8VOLA1KH1型控制原理图,其实为带液压耦合器的独立功率控制器,两个独立控制器的液压耦合器提供总功率控制功能。然而,两台泵通过液压而不是机械耦合。
两个回路的工作压力分别作用在两个独立控制器的差压活塞上,使两台泵斜盘一起摆出或摆回(两台泵的出口压力通过内部通道不仅连接到各自的功率控制调节器控制活塞上,而且还分别连接到对方的功率控制器活塞上)。
如果一个泵以低于总输入功率的50%工作,其余功率可以传输至另一个泵,这样最高工作功率可达总输入功率的100%。
通俗来讲,就是液压泵的流量变化不仅受该泵所在回路压力变化的影响,也与另一回路的压力变化有关系,也就是两个回路的液压泵独立分功率控制与交叉控制结合进行恒功率调节变量。功率交叉控制系统的发动机功率分给两台泵,每一回路可分别拥有发动机功率的一半,当其中一台泵的需求降低或不工作时,另一台泵自动利用发动机功率直至100%。
交叉功率控制方式是在综合全功率控制以及分功率控制的优点的基础上开发出来的,它的原理和全功率控制是相同的,但是每台泵的流量却是不同的。
交叉功率控制结构是把两台排量和调节机构相同的泵串联起来,所以这种控制方式又可以像分功率控制一样每一台泵独立控制各自的回路。所以说,交叉功率控制不仅能将发动机的输出功率全部吸收,而且可以像分功率控制一样按照回路的负载压力实现对自身回路的独立调节,从而将发动机的输出功率充分利用起来。交叉功率控制相对于上面两种控制方式来说,它既可以最大程度地利用发动机的输出功率,又增强了低负载回路对实际功率的适应性。
通过附加的H1/H3液压行程限位器功能,每个斜盘旋转组件可以独立摆回到比当前功率控制规定更小的指定排量Vg上。
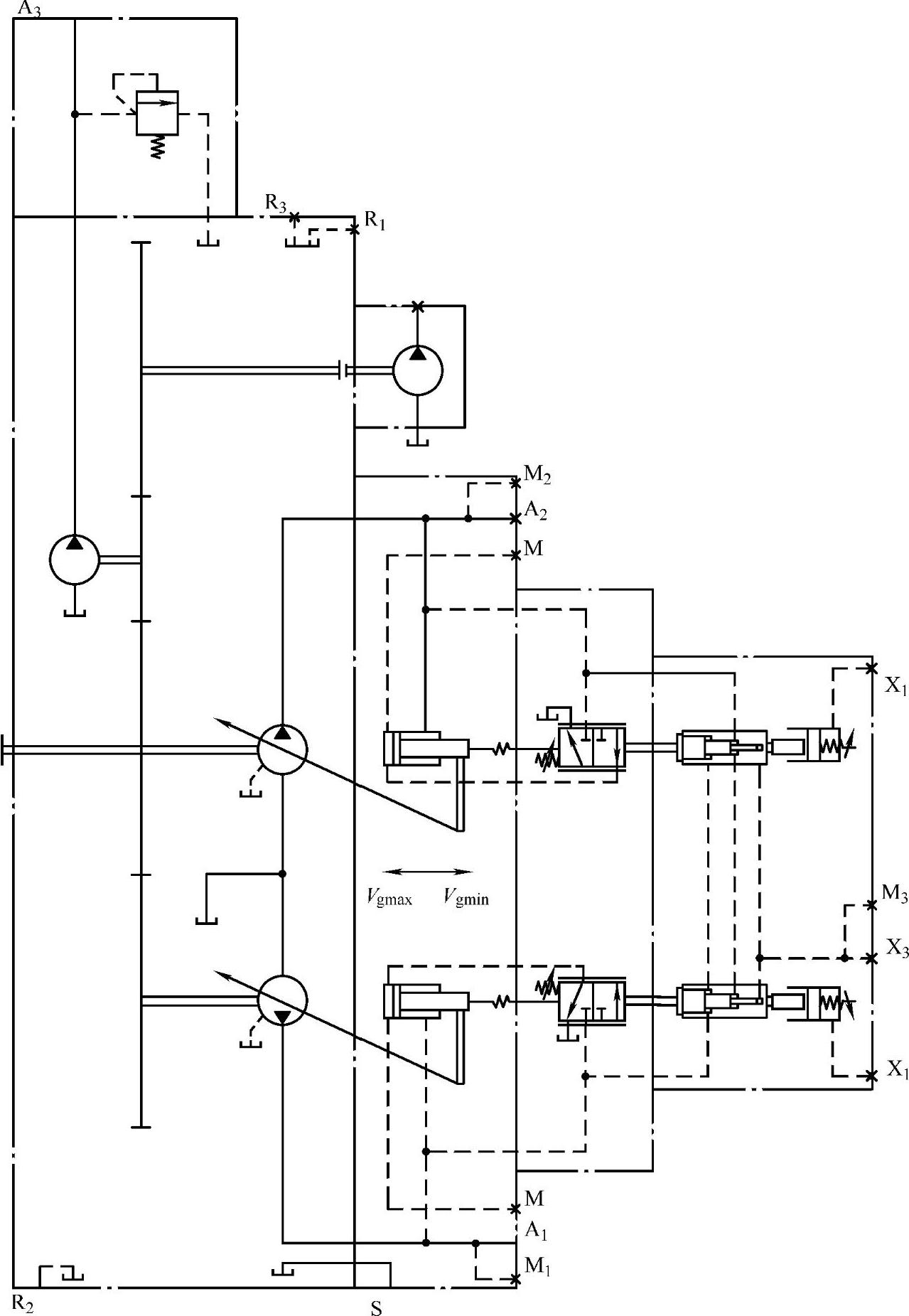
图3-61 A8VOLA1KH1型控制系统原理图
图3-62所示为A8VOLA1K型控制系统原理图,其中每台泵都带有压力切断阀5,前已叙述,压力切断最大的好处是可以避免系统在过载状态下的溢流损失。
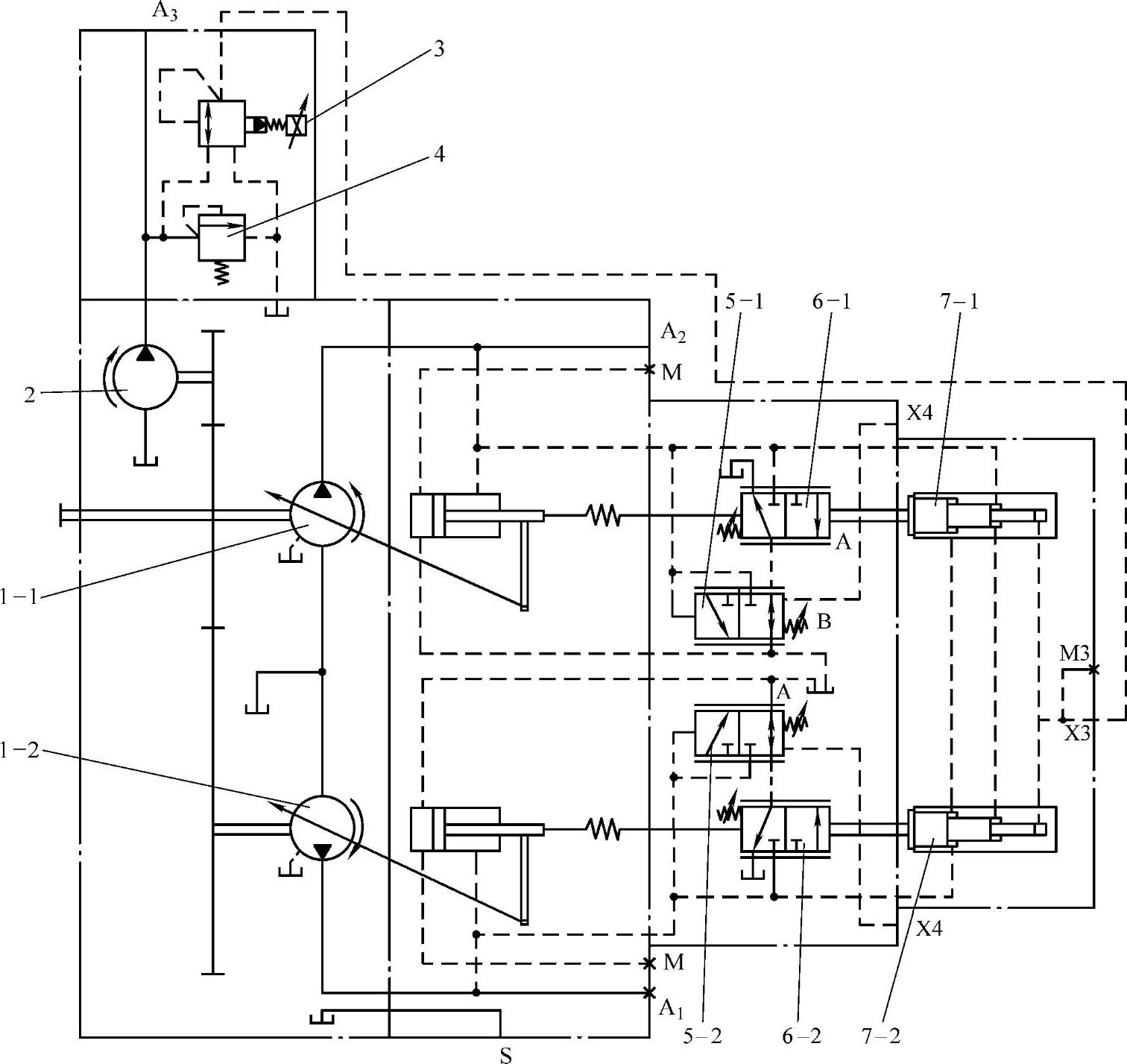
图3-62 A8VOLA1K型控制系统原理图
1—主泵 2—辅助泵 3—比例减压阀 4—溢流阀 5—压力切断阀 6—功率调节阀 7—恒功率控制调节器
用于LA0KH1的油路图模块和用于LA0KH3的油路图模块如图3-63所示。
5.带有负载感应的独立功率控制器LA0S、LA1S、LA0KS、LA1KS
负载感应控制器是一个以负载压力为导向的流量控制元件,根据执行器流量需求调节泵排量,带压力切断+恒功率控制+负载感应+极限负荷控制的控制原理图如图3-64所示。该泵输出流量取决于安装在泵和执行器之间的外部感应节流阀的开口横截面面积。该流量与低于功率特性曲线以及泵控制范围内的负载压力无关。感应节流阀通常为一个单独布置的负载感应方向阀。方向阀活塞的位置决定了感应节流阀的开口横截面面积,从而决定了泵的流量。负载感应控制器比较感应节流阀前后的压力,并维持压降(压差Δp),从而使流量保持恒定。如果压差Δp增大,泵则摆回(朝向Vgmin);而如果压差Δp减小,则泵摆出(朝向Vgmax),直到阀内恢复平衡。节流阀两端的压差为
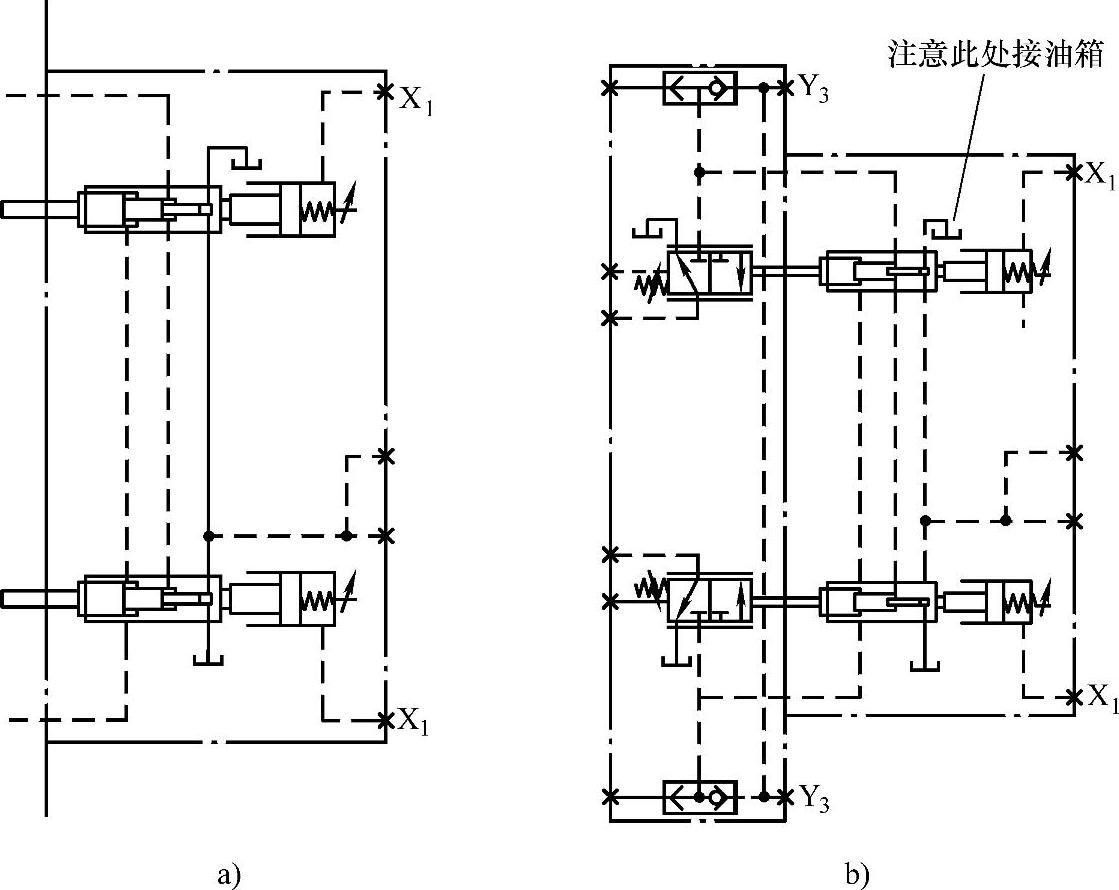
图3-63 用于LA0KH1的油路图模块和用于LA0KH3的油路图模块
a)用于LA0KH1的油路图模块 b)用于LA0KH3的油路图模块
Δp感应节流阀=p泵-p执行器 (3-4)
Δp的设置范围为1.4~2.5MPa,标准设置值为0.8MPa,零行程运行(感应节流阀堵上)时的备用压力略高于Δp的设置值。在LUDV(流量共用)系统中,压力切断装置内置在LUDV阀组中。
6.EP型带比例电磁铁的电气控制
通过带比例电磁铁的电气控制,利用电磁力将泵排量成比例地无级调节,控制系统原理图及特性曲线如图3-65所示。控制范围从Vgmin至Vgmax,随着控制电流的增加,泵调节至较大排量。没有控制信号(控制电流)的初始位置在最小排量Vgmin,所需控制压力来自工作压力或外部施加给油口Y3的控制压力。为了确保在低工作压力(<3MPa)下也可进行控制,必须对油口Y3施加约3MPa的外部控制压力。
7.全功率控制方式
如图3-66所示,两台液压泵1和2由一个全功率调节机构3来进行调节,使两台液压泵的摆角位置始终相同,从而实现同步变量。因此,两台泵的流量相同,决定液压泵流量变化的不是某一条回路的工作压力的单个值,而是系统的总压力。经压力平衡器(压力平衡器的原理图如图3-67所示)将两台液压泵的工作压力p1、p2之和的一半作用到调节器上实现两泵共同变量。压力平衡器各段截面面积分别为A1、A2和A3,且A1=A2=A3/2,双泵流量q1=q2=q,由图3-67可知泵出口压力和排量关系:
p1A1+p2A2=p3A3 (3-5)
所以
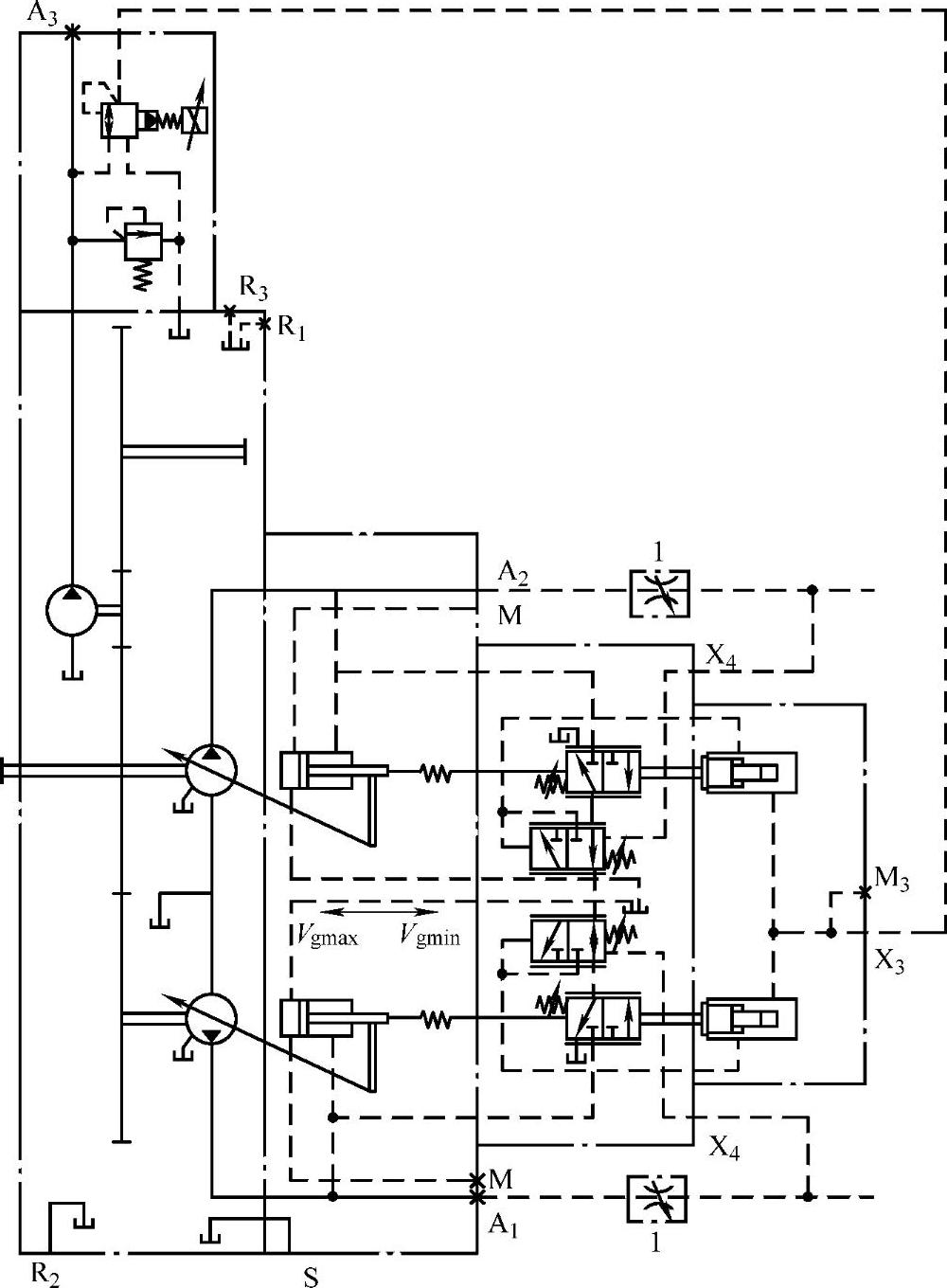
图3-64 LA1S型控制油路图
1—外部感应节流阀

设泵的总功率为P,则泵出口压力和流(排)量关系为
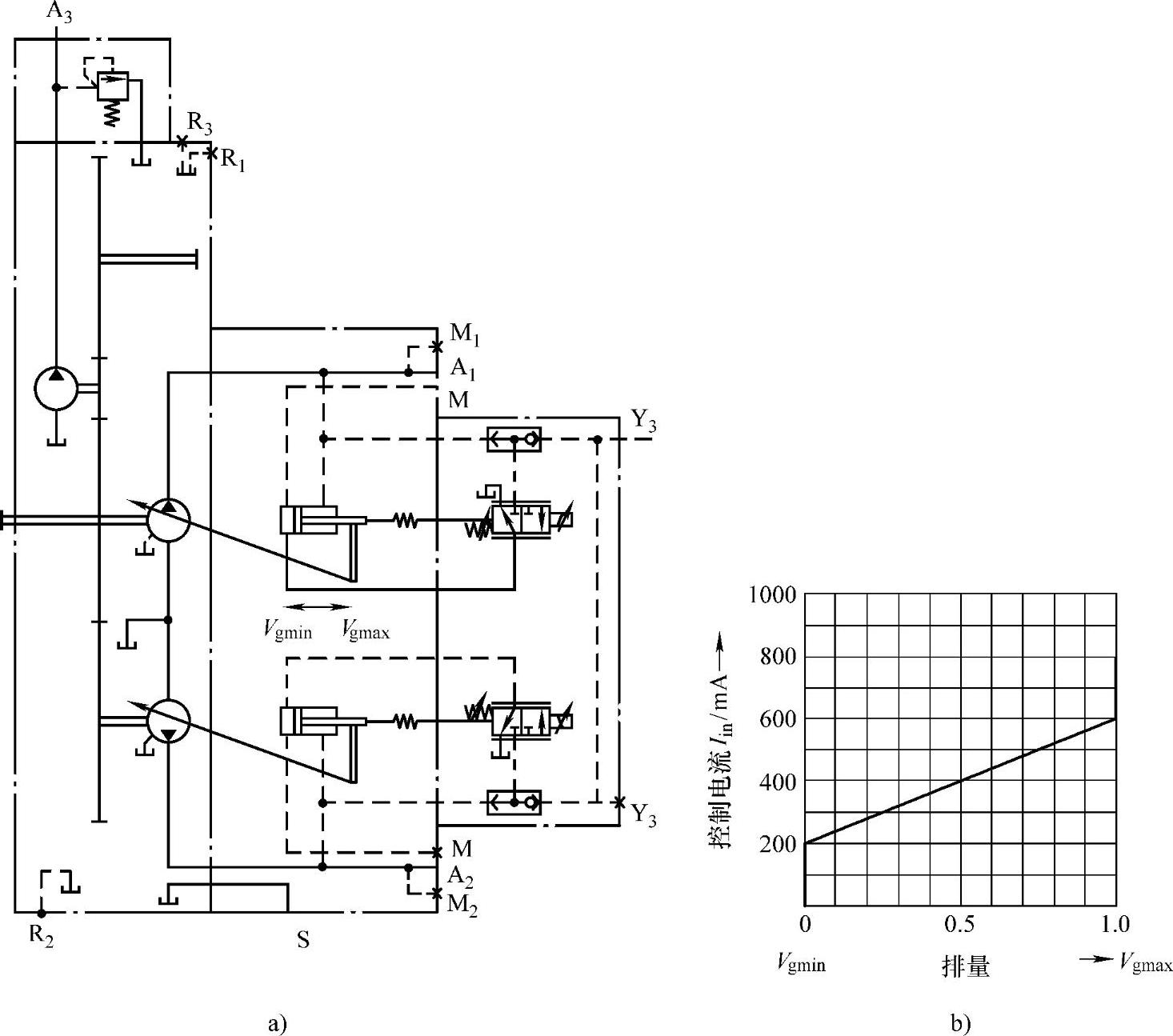
图3-65 EP型控制系统原理图及特性曲线
a)原理图 b)特性曲线

该系统的特点是两台液压泵的排量始终是相等的,能充分利用发动机功率;两台液压泵各自都能够吸收柴油机的全部功率,提高了工作装置的作业能力;结构简单。由于以上特点,全功率变量泵液压系统在挖掘机上曾经得到大量应用。不足是:工作时,若两台液压泵需要的压力、流量不相同,则处于高压的泵的流量大于系统需要的流量,多余油液从溢流阀流走,使系统发热并造成功率损失;而另一个低压泵又得不到最大流量,使执行机构达不到最大速度。另外,当实际使用功率小于总功率调节值时,系统仍然要按最大功率运转,多余功率则变为热能而损失掉。
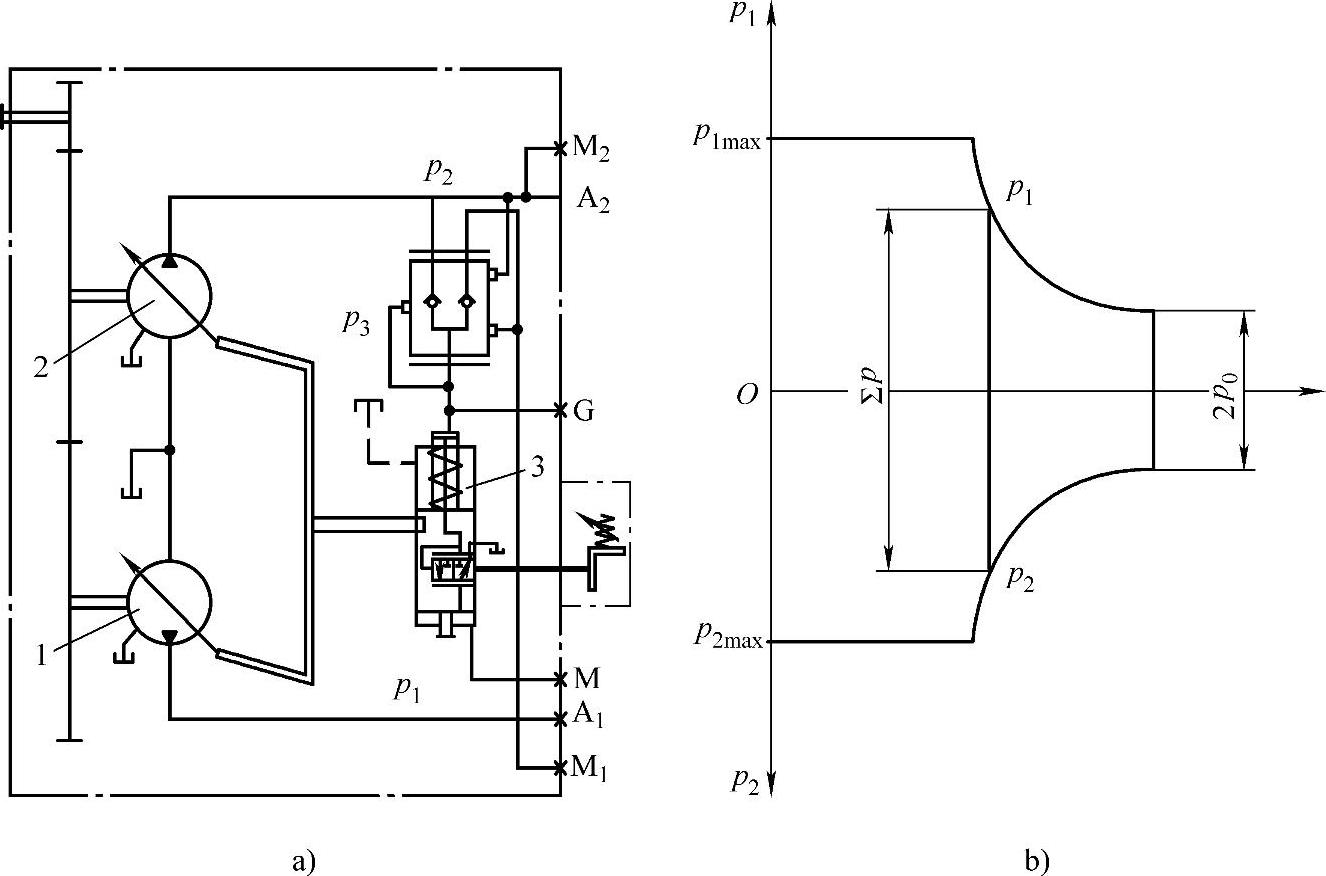
图3-66 全功率控制
a)系统原理 b)系统特性
1—主泵1 2—主泵2 3—全功率调节机构
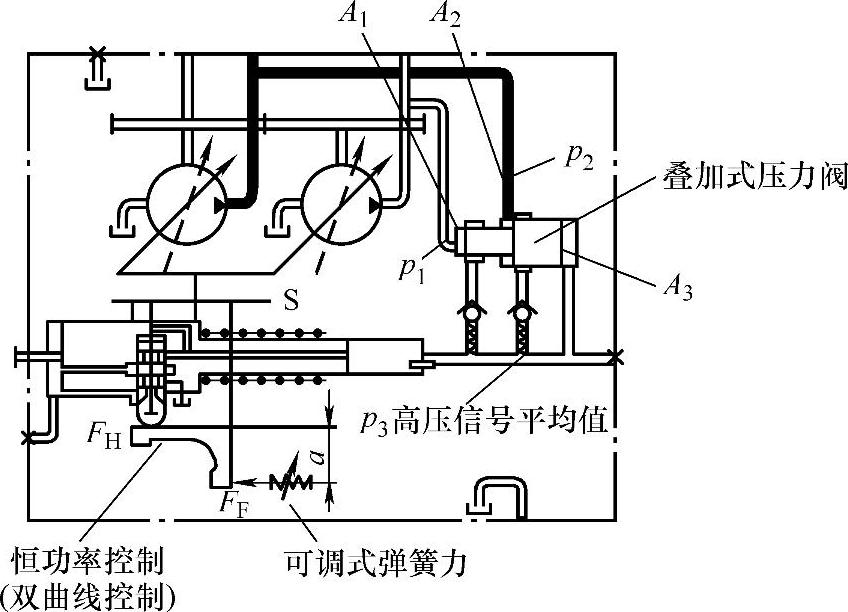
图3-67 压力平衡器原理
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。