



WinCC flexible提供了一个模拟器软件,在没有HMI设备的情况下,可以用WinCC flexible的运行系统来模拟HMI设备,用它来测试项目,调试已组态的HMI设备的功能。模拟调试也是学习HMI设备的组态方法和提高动手能力的重要途径。有下列3种模拟调试的方法:
1.不带控制器连接的模拟(离线模拟)
如果手中既没有HMI设备,也没有PLC,可以用模拟表来设置和显示PLC中变量的数值。因为没有运行PLC的用户程序,离线模拟只能模拟人机界面的部分功能,例如画面的切换和数据的输入过程等。
2.带控制器连接的模拟(在线模拟)
组态好HMI设备的画面后,如果没有HMI设备,但是有PLC,可以用通信适配器或通信处理器连接计算机和S7-300/400的通信接口,进行在线模拟,用计算机模拟HMI设备的功能。因为不用将组态信息下载到HMI设备,节约了调试时间。在线模拟的效果与实际系统基本上相同。
3.集成模式下的模拟(集成模拟)
本例程采用集成模拟。WinCC flexible的项目集成在STEP 7的项目中,用WinCC flexible的运行系统来模拟HMI设备,用S7-300/400的仿真软件S7-PLCSIM来模拟PLC。这种模拟不需要HMI设备和PLC的硬件,模拟的效果与实际系统的运行情况基本上相同。
下面是对项目“PLC_HMI”作集成模拟的操作步骤:
1)在SIMATIC管理器中,打开PLCSIM。将用户程序和组态信息下载到仿真PLC,将仿真PLC切换到RUN-P模式。
2)单击WinCC flexible工具栏上的  按钮,启动运行系统,开始模拟HMI。
按钮,启动运行系统,开始模拟HMI。
3)单击画面上的水泵启动按钮(见图7-22),PLCSIM的MB0视图对象中的M0.0被置位为1,由于PLC的OB1的程序的作用,Q0.0(水泵)变为1状态,画面上的水泵指示灯亮,液位值不断增大。放开启动按钮,M0.0变为0状态,液位值继续增大。单击画面上的水泵停止按钮,M0.1变为1状态。由于PLC程序的作用,水泵指示灯熄灭,液位值停止增大。液位值达到上预设值时,由于PLC程序的作用,水泵也会停机,液位值停止增大。(https://www.xing528.com)
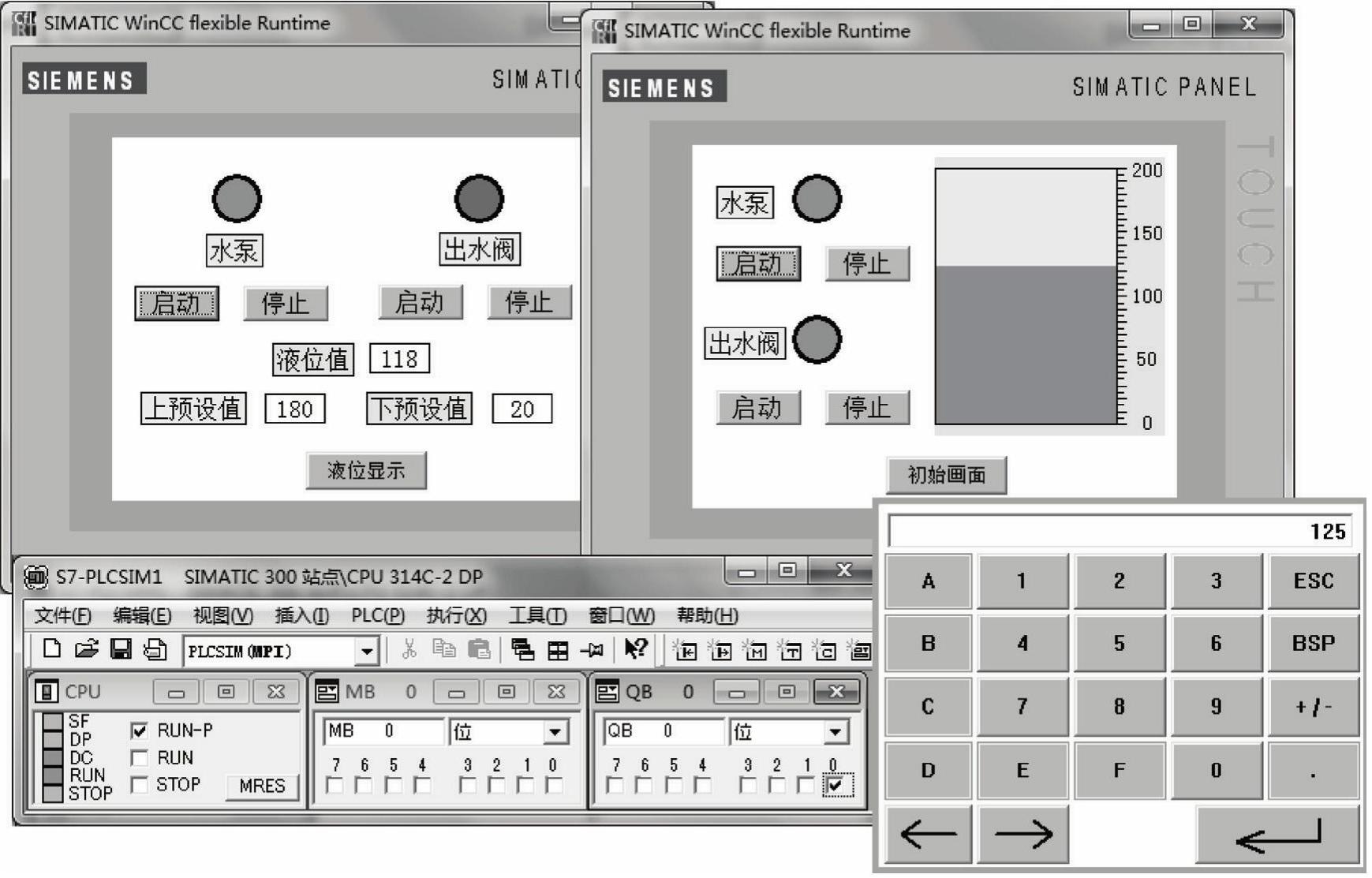
图7-22 PLC与HMI的集成模拟仿真
4)单击画面上的出水阀启动按钮(见图7-22),PLCSIM中的M0.2被置为1后又被复位为0,由于PLC程序的作用,Q0.1(出水阀)变为1状态,画面上的出水阀指示灯亮,液位值不断减小。单击画面上的出水阀停止按钮,由于PLC程序的作用,Q0.1变为0状态,出水阀指示灯熄灭,液位值停止减小。液位值达到下预设值时,由于PLC程序的作用,出水阀也会自动关闭,液位值停止减小。同时启动水泵和出水阀时,因为进水的速度大于出水的速度,液位将会上升,升至上预设值时水泵自动停机。
5)单击画面上的文本域“上预设值”右边的输入/输出域,画面上出现一个数字键盘见图7-22右下角的图)。其中的“ESC”是取消键,单击它数字键盘消失,退出输入过程,输入的数字无效。“BSP”是退格键,与计算机键盘上的〈Backspace〉键的功能相同。单击该键,将删除光标左侧的数字。“+/-”键用于改变输入的数字的符号。  和
和  分别是光标左移键和光标右移键,
分别是光标左移键和光标右移键,  是确认(回车)键,单击它使输入的数字有效(被确认),同时关闭键盘。输入的数字将在输入/输出域中显示。
是确认(回车)键,单击它使输入的数字有效(被确认),同时关闭键盘。输入的数字将在输入/输出域中显示。
用弹出的小键盘输入数据125,按回车键确认,键盘输入的值被传送给PLC中的变量“上预设值”(MW2)。启动水泵后可以看到液位的上预设值变为125。可以用同样的方法设置下预设值MW4。
6)单击画面下面的“液位显示”按钮,切换到液位显示画面。启动水泵或出水阀,可以看到用棒图显示的液位值的变化。单击模拟面板右上角的  按钮,关闭模拟面板。
按钮,关闭模拟面板。
4.人机界面的集成仿真练习
打开随书光盘中的项目“电机控制”,生成一个HMI站点,HMI的型号为TP 177B 6”color PN/DP。将两个站点连接到MPI网络上。打开WinCC flexible,在“连接”编辑器将“激活的”列设置为“开”。在画面上生成两个指示灯,用来显示电动机正转接触器和反转接触器的状态。在指示灯下面生成文本域,显示指示灯的功能。生成3个按钮,分别控制电动机的正转、反转和停车。用文本域标注3个按钮的功能。
STEP 7的OB1中是电动机正反转控制程序。打开PLCSIM,将用户程序和组态信息下载到仿真PLC,将仿真PLC切换到RUN-P模式。单击WinCC flexible工具栏上的  按钮,启动运行系统,用本实训介绍的方法进行集成仿真。
按钮,启动运行系统,用本实训介绍的方法进行集成仿真。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。