



流变学是一门研究物质变形和流动的科学。黏度是流体在剪切应力作用下抵抗变形的能力。
聚合物熔体的流变行为极其复杂,实践者们苦思冥想才提出用熔体流动指数(MIF,根据ASTM D1238的规定,熔体流动指数是指在给定压力和时间下聚合物熔体通过特定长度和直径的毛细管的质量,较高的熔体流动指数对应较低的黏度和较好的加工性能)来表征其流变特性。事实上,MFI是对黏度的单点测量,并不能代表加工时较大范围的剪切速率变化、温度变化和压力变化时的材料行为。由于这个原因,很多黏度模型因塑料注射成型而发展起来。
广泛认为,Cross-WLF模型[26]是很好的熔体黏度模型,熔体黏度η是剪切速率 、温度T、压力p的函数,即
、温度T、压力p的函数,即

式中,η0是牛顿极限,在低剪切速率下该黏度值接近常数;τ∗是黏度从牛顿极限转变到幂律状态时的临界应力值;n是高剪切速率状态下的幂指数。
Cross-WLF模型的形式是容易理解的,因为其中的三个参数η0、τ∗和n可以直接从黏度-剪切速率对数图上直接估读出来。
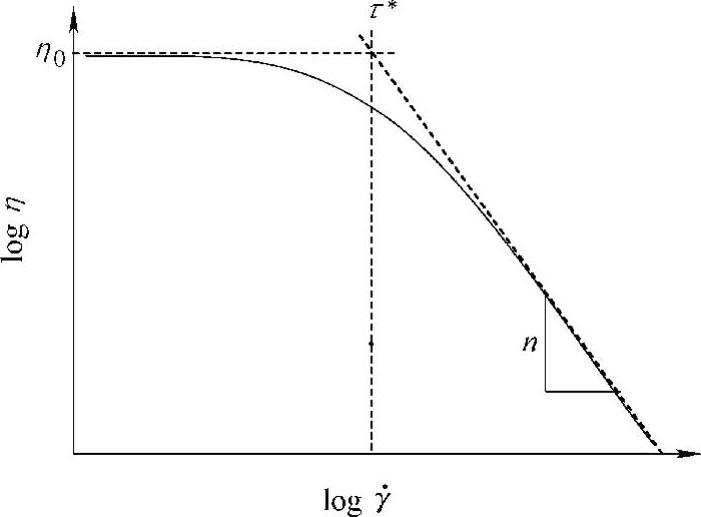
图5.4 Cross-WLF黏度模型(https://www.xing528.com)
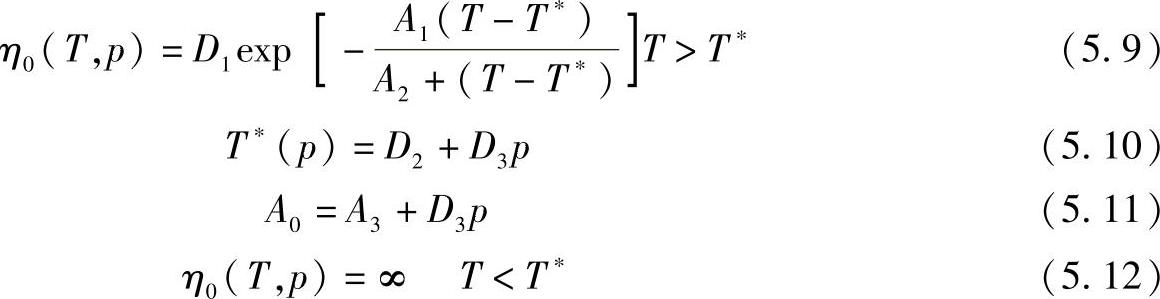
在式(5.8)中,零剪切黏度η0是温度T和压力p的函数。温度关系有很多形式,最普遍的模型之一是Cross-WLF温度关系,它包括经过玻璃化转变温度T∗的压力关系,即
通常,模型参数(n、τ∗、D1、D2、D3、A1和A3)是由试验得到的剪切黏度数据拟合曲线决定的,该试验数据由毛细管流变仪测得,剪切速率从10s-1到10000s-1。成千上万种塑料的材料特性已得到表征,并且附录A提供了一些代表性材料的Cross-WLF模型系数。三种不同温度下中黏度PC的Cross-WLF黏度和剪切速率的关系如图5.5所示。
由图5.5可知,剪切速率在1~100s-1时,黏度处于牛顿平台区,剪切速率大于100s-1时黏度转为幂律态。当熔融温度为280℃时,剪切速率为100s-1时熔体黏度为350Pa·s,剪切速率升高为10000s-1时熔体黏度降低到80 Pa·s。由于熔体黏度强烈依赖于剪切速率,所以对于分析预测来说,填充时间、熔体速度和剪切速率是非常重要的。黏度也强烈依赖于温度,零剪切黏度从290℃时的250Pa·s增大到270℃时的660Pa·s。因此,对于预测熔体流动和压力来说,掌握工艺温度也是非常重要的。
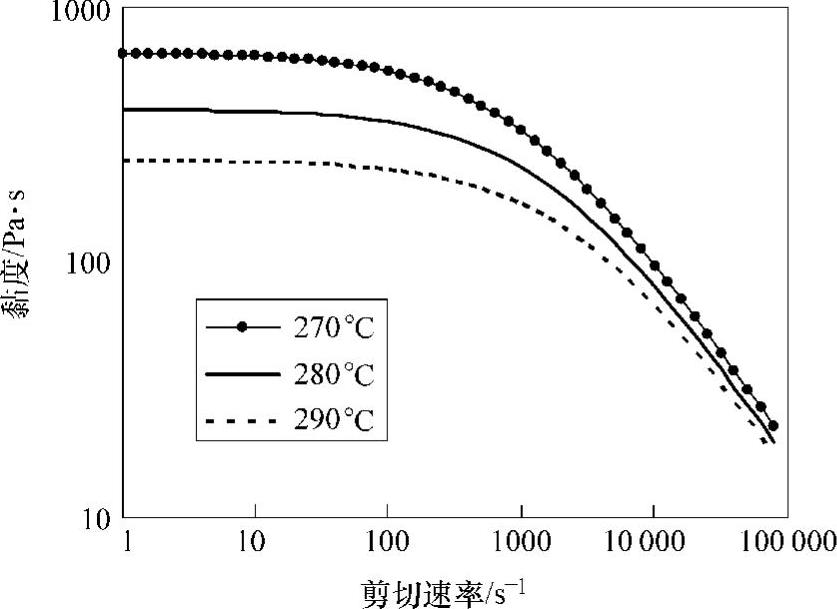
图5.5 PC的黏度和剪切速率的关系
Cross-WLF模型已相当成熟,通常用于数值模拟,但不适用于人工填充分析。原因在于很难进行操作,并且与熔体流量以压力作为自变量时的分析结果不相符。由于这个原因,通常使用其他几个黏度模型,这些黏度模型能得出相对简单的分析结果。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。