



执行机构是将控制器输出信号转换为控制阀阀杆直线位移或阀轴角位移的装置。执行机构提供推动力或推动力矩,用于克服不平衡力、阀压紧力和摩擦力等,使位移量与输入信号成比例变化。控制阀的执行机构能够精确的使阀门走到任何位置。尽管大部分执行机构都是用于开关阀门,但是如今的执行机构的设计远远超出了简单的开关功能,它们包含了位置感应装置,力矩感应装置,电极保护装置,逻辑控制装置,数字通讯模块及PID控制模块等,而这些装置全部安装在一个紧凑的外壳内。
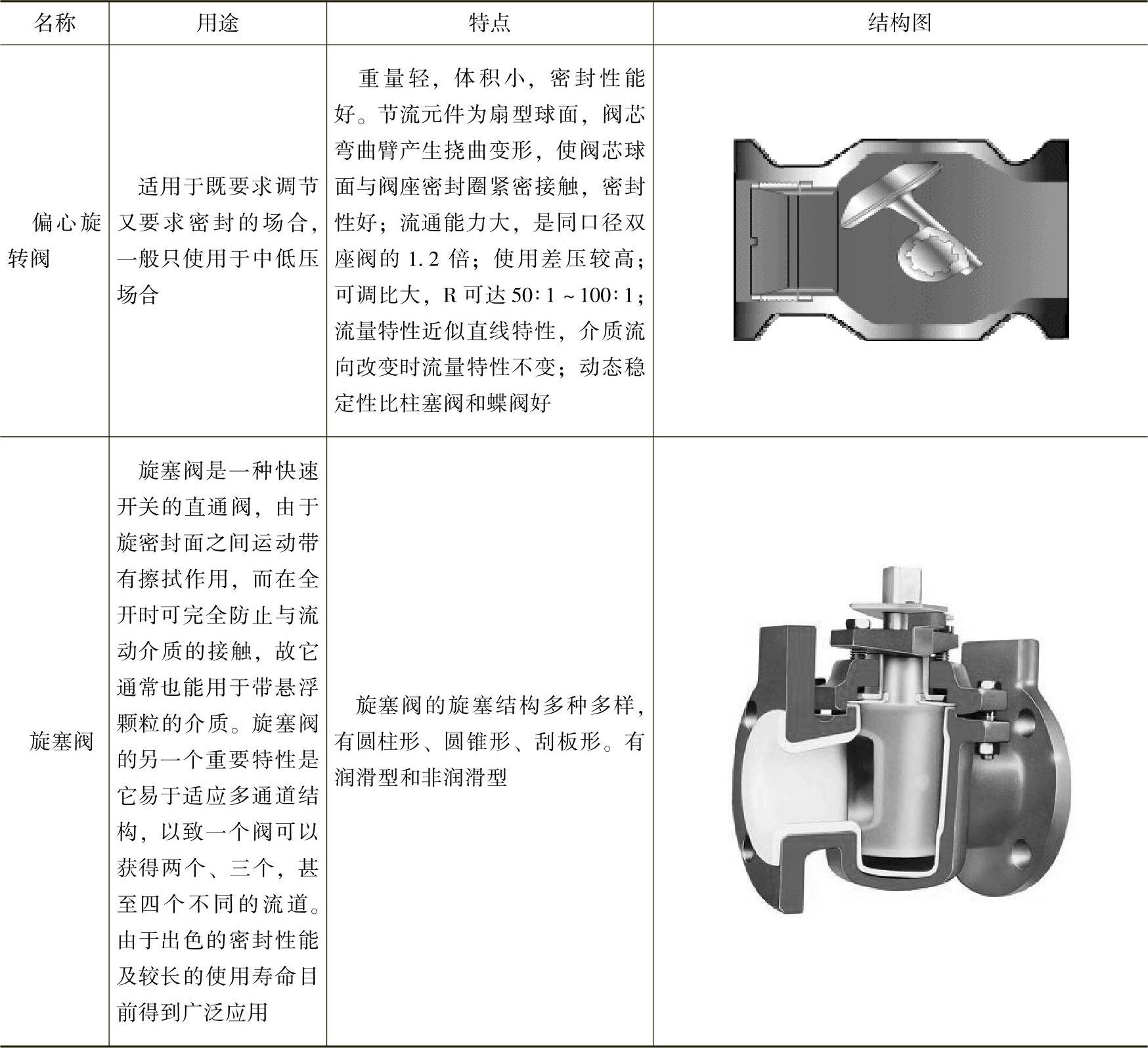
表7-1 调节阀结构类型
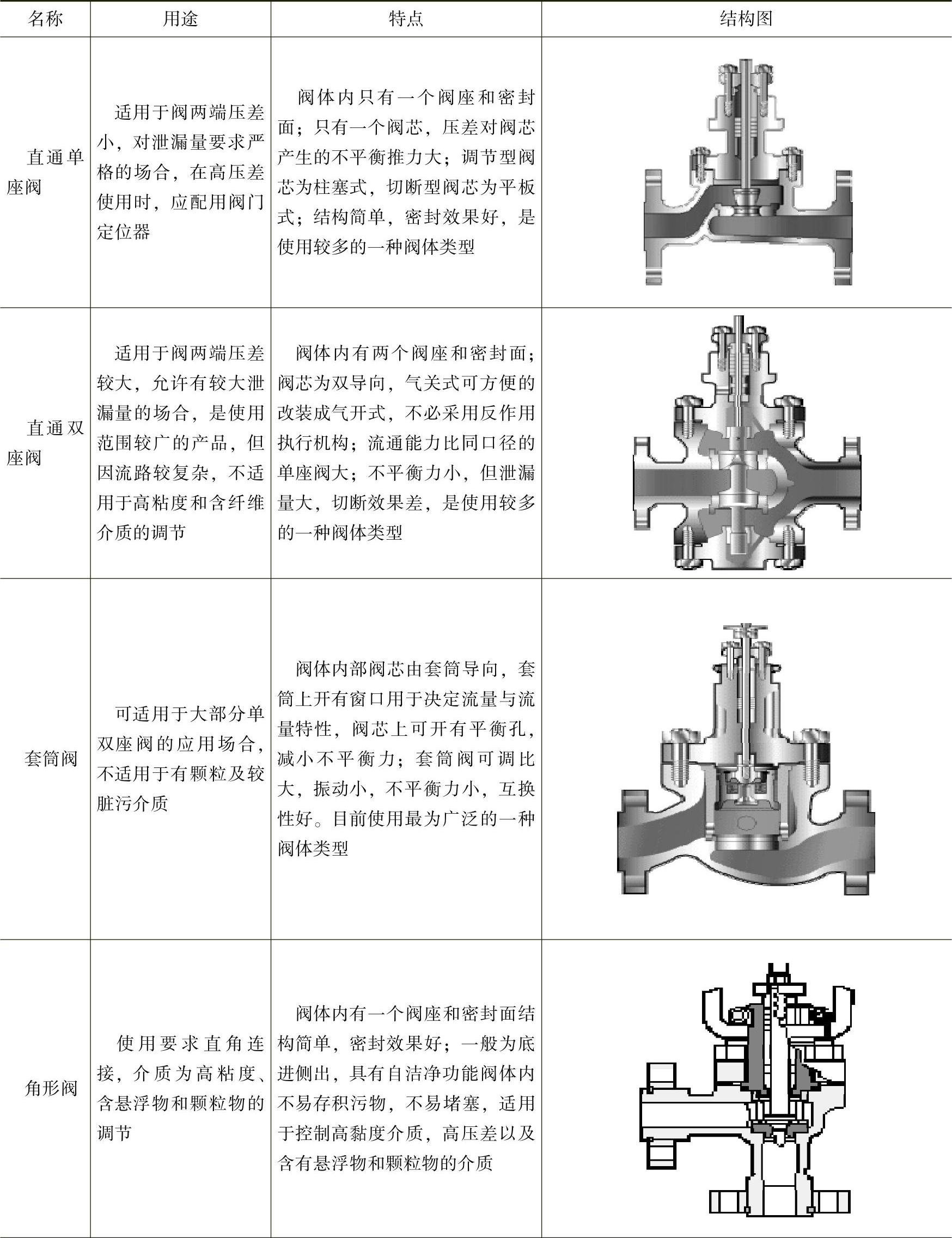
(续)
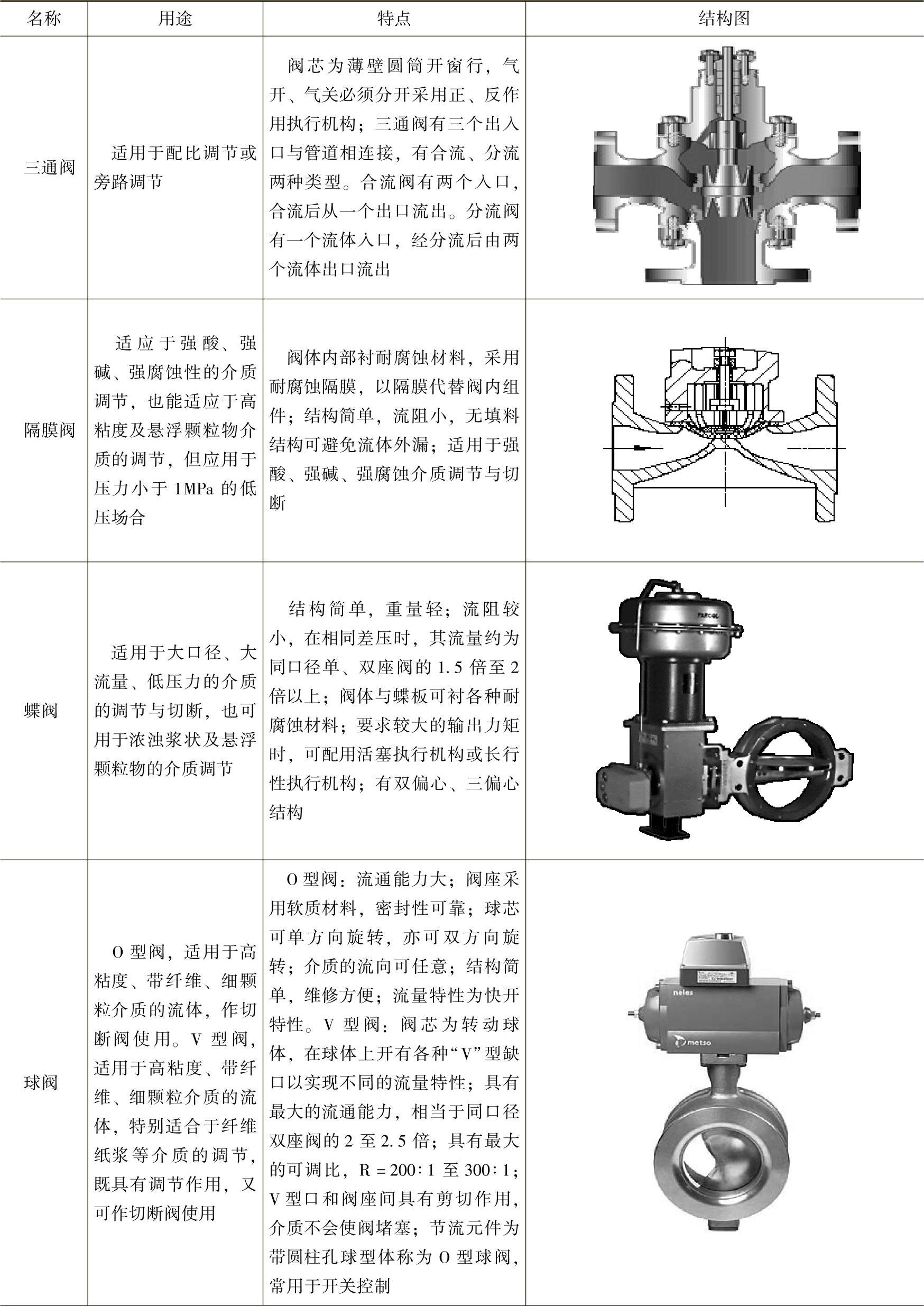
(续)
按输出的移动方向,执行机构分为正作用和反作用执行机构。正作用执行机构在输入信号增加时,阀杆向外移动。反作用执行机构在输入信号增加时,阀杆向内移动。按执行机构输出位移的类型,执行机构分为直行程执行机构、角行程执行机构和多转式执行机构。直行程执行机构输出直线位移。角行程执行机构输出角位移,角位移小于360°。例如,转动角度为90°或60°蝶阀执行机构。多转式执行机构与角行程执行机构类似,但转动的角位移可以达多圈。
1.气动执行机构
气动执行机构是以压缩空气为动力源,具有结构简单、动作可靠、性能稳定、维修方便、和防火防爆等特点。按执行机构组成部件的类型,气动执行机构分为薄膜执行机构、活塞执行机构、长行程执行机构等。
(1)气动薄膜执行机构。气动薄膜执行机构是一种应用最广泛的执行机构,通常接受0.02~0.1MPa的气动信号。分为正作用式和反作用式动作形式以及单弹簧和多弹簧设计结构,如图7-1所示。
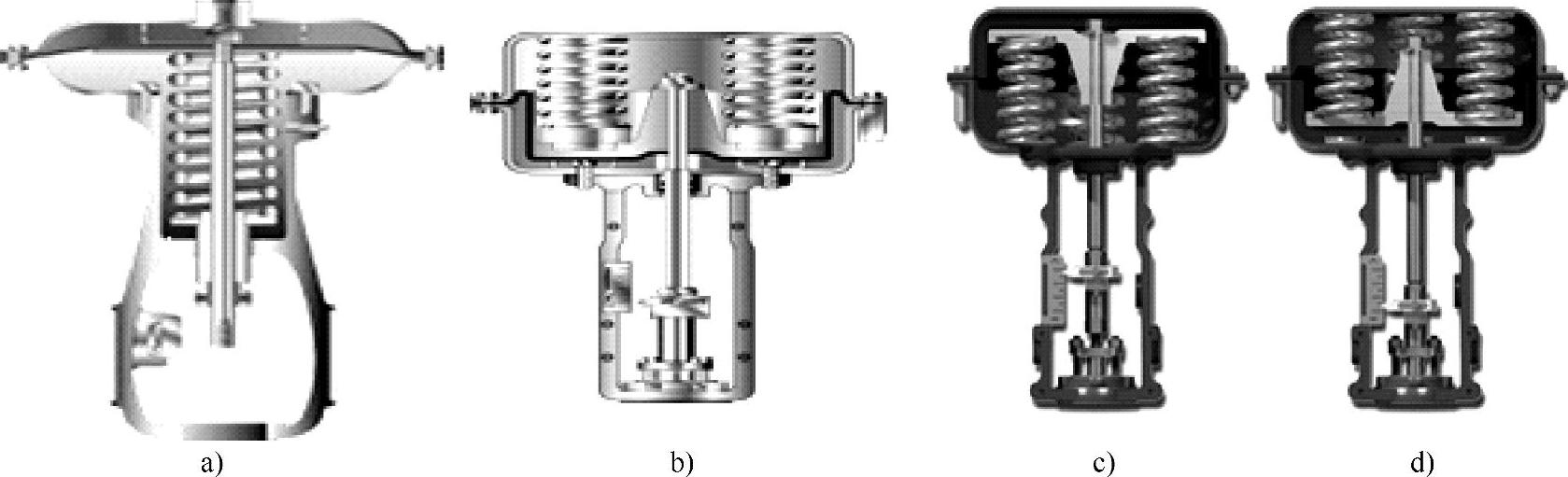
图7-1 气动薄膜执行机构
a)单弹簧 b)多弹簧 c)正作用 d)反作用
气动薄膜执行机构的特点如下:
1)正、反作用执行机构的结构基本相同,由上膜盖、下膜盖、薄膜膜片、推杆、弹簧、调节件、支架和行程显示板等组成。
2)正、反作用执行机构结构的主要区别是反作用执行机构的输入信号在膜片下部,引出的推杆也在下部,因此,阀杆引出处要用密封套进行密封,而正作用执行机构的输入信号在膜片上部,推杆引出处在膜片下部,由于薄膜片的良好密封,因此,在阀杆引出处不需要进行密封。
3)可通过调节件的调整,改变弹簧初始力,从而改变执行机构的推力。
4)执行机构的输入输出特性呈现线性关系,即输出位移量与输入信号压力之间成线性关系。输出的位移称为行程,由行程显示板显示。一些反作用执行机构还在膜片上部安装阀位显示器,用于显示阀位。国产气动薄膜执行机构的行程有10mm、16mm、25mm、40mm、60mm和100mm六种规格。
5)执行机构的膜片有效面积与推力成正比,有效面积越大,执行机构的推力也越大。
6)可添加位移转换装置,使直线位移转换为角位移,用于旋转阀体。
7)可添加阀门定位器,实现阀位检测和反馈,提高控制阀性能。
8)可添加手轮机构,在自动控制失效时采用手轮进行操作,提高系统可靠性。
9)可添加自锁装置,实现控制阀的自锁和保位。
(2)气动活塞式执行机构。气动活塞式(无弹簧)执行机构采用活塞作为执行驱动元件,它的活塞随气缸两侧压差而移动,具有推力大、响应速度快的优点,如图7-2所示。
气动活塞执行机构的特点如下:
1)可采用较大的气源压力。例如,操作压力可高达1MPa,国产活塞执行机构也可0.5MPa,此外,它不需要气源的压力调节减压器。
2)推力大。由于不需要克服弹簧的反作用力,因此提高操作压力和增大活塞有效面积就能获得较大推力。对采用弹簧返回的活塞执行机构,其推力计算与薄膜执行机构类似,其推力要小于同规格的无弹簧活塞执行机构。
3)适用于高压差、高静压和要求有大推力的应用场合。
4)当作为节流控制时,输出位移量与输入信号成比例关系,但需要添加阀门定位器。
5)当作为两位式开闭控制时,对无弹簧活塞的执行机构,活塞的一侧送输入信号,另一侧放空,或在另一侧送输入信号,一侧放空,实现开或关的功能;有弹簧返回活塞的执行机构只能够在一侧送输入信号,其返回是由弹簧实现的。为实现两位式控制,通常采用电磁阀等两位式执行元件进行切换。采用一侧通恒压,另一侧通变化压力(大于或小于恒压)的方法实现两位控制,它使响应速度变慢;采用两侧通变化的压力(一侧增大,另一侧减小)实现两位控制,同样会使响应速度变慢,不拟采用。
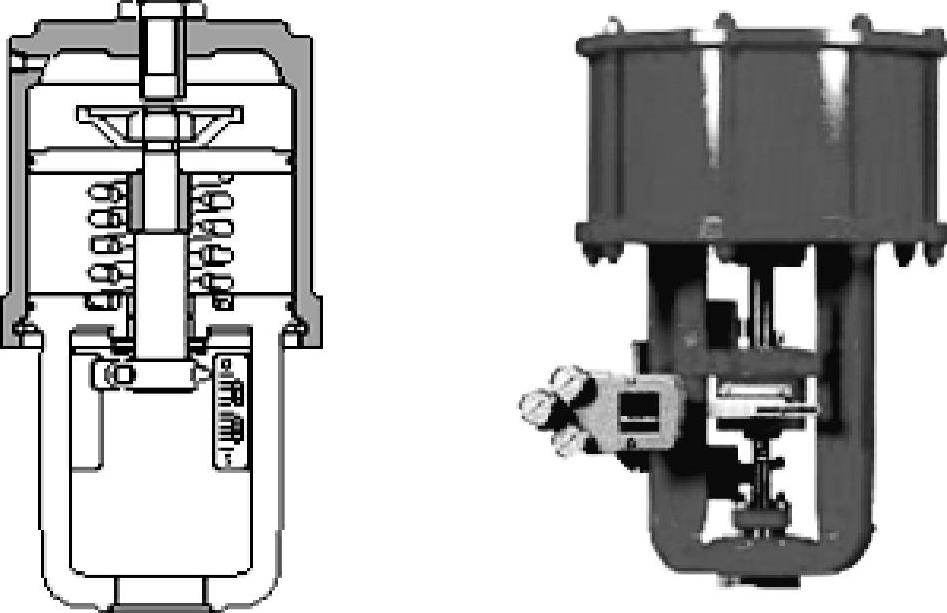
图7-2 气动活塞式执行机构(https://www.xing528.com)
6)与薄膜执行机构类似,活塞执行机构分正作用和反作用两种类型。输入信号增加时,活塞杆外移的类型称为正作用式执行机构;输入信号增加时,活塞杆内缩的类型称为反作用式执行机构。作为节流控制,通常可采用阀门定位器来实现正反作用的转换,减少设备类型和备件数量。
7)根据阀门定位器的类型,如果输入信号是标准20~100kPa气压信号,则可配气动阀门定位器;如果输入信号是标准4~20mA电流信号,则可配电气阀门定位器。
8)可添加专用自锁装置,实现在气源中断时的保位。
9)可添加手轮机构,实现自动操作发生故障时的手动操作。
10)可添加位移转换装置使直线位移转换为角位移,有些活塞式执行机构采用横向安装,并经位移转换装置直接转换直线位移为角位移。
(3)长行程执行机构是为适应行程长(可达400mm)、转矩大的应用而设计的执行机构,它可将0.02~0.1MPa(或0.04~0.2MPa)的气动信号压力或4~20mA电流信号转换为相应的位和转角,因此,不需外加位移转换装置。
2.电动执行机构
电动执行机构是采用电动机和减速装置来移动阀门的执行机构,如图7-3所示。通常,电动执行机构的输入信号是标准的电流或电压信号,其输出信号是电动机的正、反转或停止的三位式开关信号。电动执行机构具有动作迅速、响应快、所用电源的取用方便、传输距离远等特点。电动执行机构可按位移分为直行程、角行程和多转式等三类,也可按输入信号与输出性的关系分为比例式、积分式等两类。
电动执行机构的特点如下:
(1)电动执行机构一般有阀位检测装置来检测阀位(推杆位移或阀轴转角),因此,电动执行机构与检测装置等组成位置反馈控制系统,具有良好的稳定性。
(2)积分式电动执行机构的输出位移与输入信号对时间的积分成正比,比例式电动执行机构的输出位移与输入信号成正比。
(3)通常设置电动力矩制动装置,使电动执行机构具有快速制动功能,可有效克服采用机械制动造成机件磨损的缺点。
(4)结构复杂价格昂贵,不具有气动执行机构的本质安全性,当用于危险场所时,需考虑设置防爆、安全等措施。
(5)电动执行机构需与电动伺服放大器配套使用,采用智能伺服放大器时,也可组成智能电动控制阀。通常,电动伺服放大器输入信号是控制器输出的标准4~20mA电流信号或相应的电压信号,经放大后转换为电动机的正转、反转或停止信号。放大的方法可采用继电器、晶体管、磁力放大器等,也可采用微处理器进行数字处理,通常,放大器输出的接通和断开时间与输入信号成比例
(6)可设置阀位限制,防止设备损坏。
(7)通常设置阀门位置开关,用于提供阀位开关信号。

图7-3 电动执行机构
(8)适用于无气源供应的应用场所、环境温度会使供气管线中气体所含的水分凝结的场所和需要大推力的应用场所。
3.电液执行机构
电液执行机构的输入信号是电信号,输出执行元件的动力源采用液压油,因此,特别适用于大推力、大行程和高精度控制的应用场合,如图7-4所示。在大型电站,为获得大推力,在主蒸汽门等控制系统中常采用电液执行机构。
电液执行机构与电动执行机构比较,由于采用液压机构,因此具有更大的推力或推力矩。但液压系统需要更复杂的油压管路和油路系统的控制。与气动活塞执行机构比较,电液执行机构采用液压缸代替气缸,由于液压油具有不可压缩性,因此,响应速度比气动活塞式执行机构快,行程的定位精确,控制精度高(可达0.5级),它的行程可很长(可达1m),输出推力矩大(可达60000N·m),输出推力大(可达25000N·m)。
与电动执行机构类似,电液执行机构也采用位置反馈装置组成反馈控制系统。它提高了整个系统的控制精度,改善了系统的动态特性。但由于价格昂贵,管路系统复杂,只有在需要大推力和推力矩的应用场合才被采用。
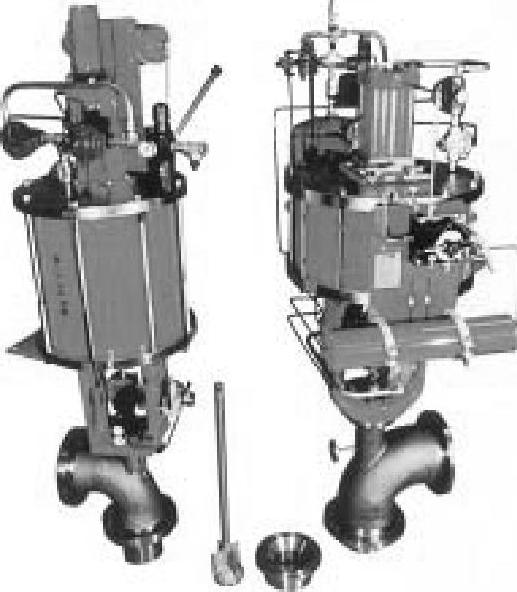
图7-4 电液执行机构
其特点如下:
(1)相同输出功率条件下,液压传动装置的体积小、重量轻、结构紧凑、惯性小,响应快。
(2)可大范围内实现无级调速,可输出较大推力和较大力矩。
(3)传动无间隙,运动平稳,可实现频繁的换向操作。操作方便,易实现自动化,易实现复杂自动控制程序,易实现过载保护。
(4)液压油黏度受环境温度影响大,也不适用于远距离传动控制。
(5)对控制装置的要求高,要求设置反馈装置组成闭环控制。根据被控变量为位移、速度和力等机械量的不同,反馈检测装置也有位移检测反馈装置、速度反馈检测装置等,使整个系统变得复杂,价格上升,也提高了对维护人员的技能要求。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。