



所谓参数整定,就是对一个已经设计并安装就绪的控制系统,选择合适的控制器参数[δ,Ti,Td],来改善系统的静态和动态特性,使系统的过渡过程达到最为满意的质量指标要求。控制器参数的整定方法很多,归纳起来可以分为两大类,即理论计算整定法和工程整定法。对于工程整定法,工程技术人员无需确切的知道对象的数学模型,就可以在控制系统中直接进行整定。常用的工程整定法有经验法、临界比例度法、衰减曲线法、响应曲线法。
1.经验法
这种方实质上是一种经验凑试法,是工程技术人员在长期的生产实践中总结出来的一种整定方法。
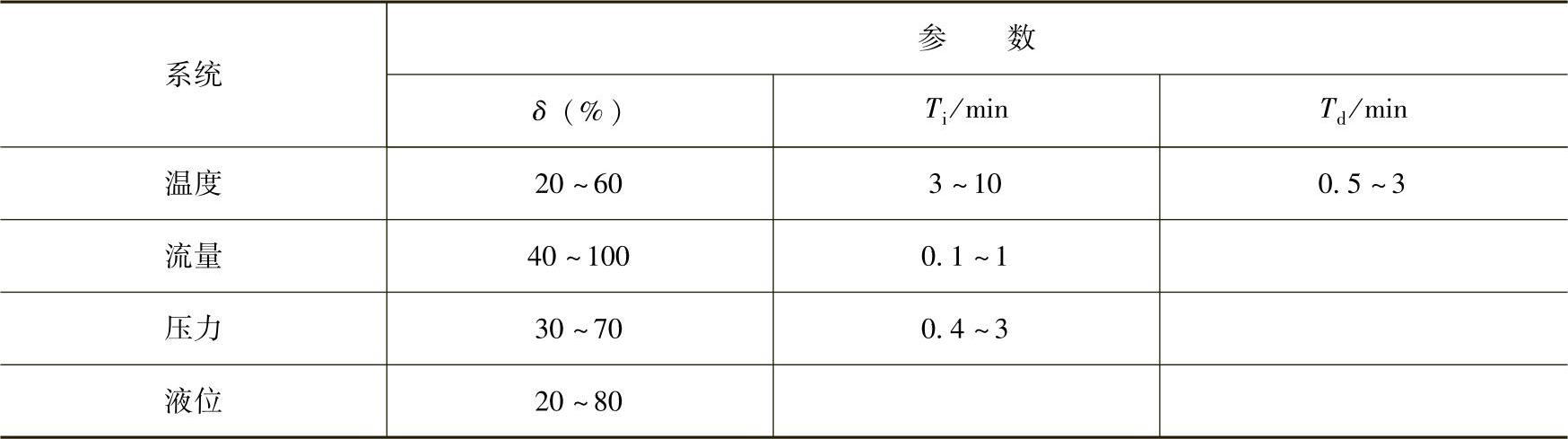
具体整定方法:根据经验先将控制器参数放在某些数值上,直接在闭合的控制系统中通过改变给定值以施加干扰,看输出曲线的形状,以δ%、Ti、Td,对控制过程的规律为指导,调整相应的参数进行凑试,直到合适为止。控制器参数经验数据见表6-1。
表6-1 控制器参数经验数据
2.临界比例度法
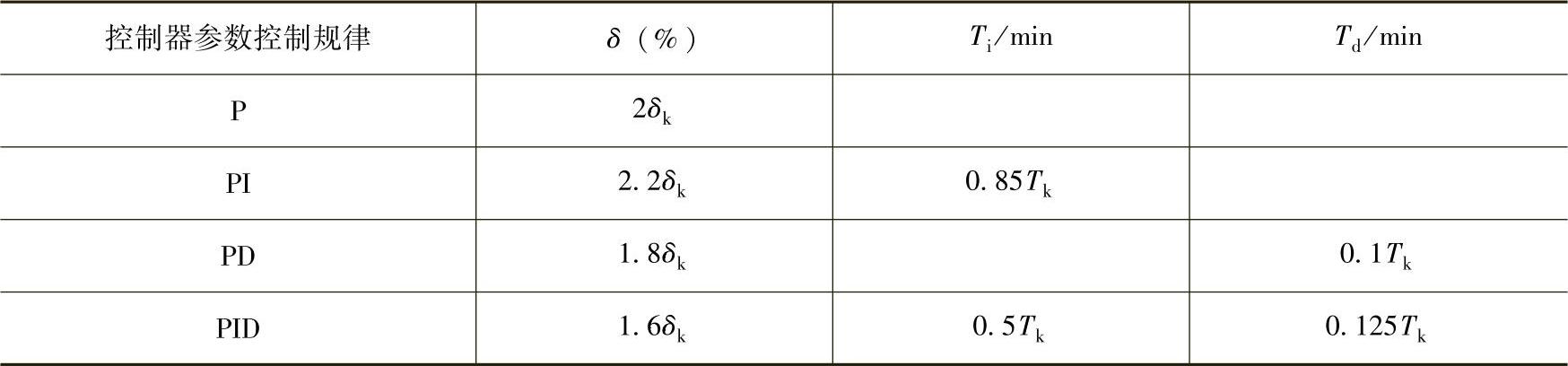
所谓临界比例度法,是在系统闭环的情况下,用纯比例控制的方法获得临界振荡数据,即临界比例度δk和临界振荡周期Tk,然后利用一些经验公式,求取满足4∶1衰减振荡过渡过程的控制器参数。其整定计算公式见表6-2所示。
表6-2 临界振荡整定计算公式
具体整定方法如下:(https://www.xing528.com)
在纯比例作用下,即将Ti放最大,Td放“0”位置上,在干扰作用下,从大到小调整比例度,直到系统出现等幅振荡(即临界振荡),记下此时的比例度δk及振荡周期Tk,然后按表6-2的数值计算出调节器的各整定参数值。
3.响应曲线法(根据广义对象的时间特性来整定参数)
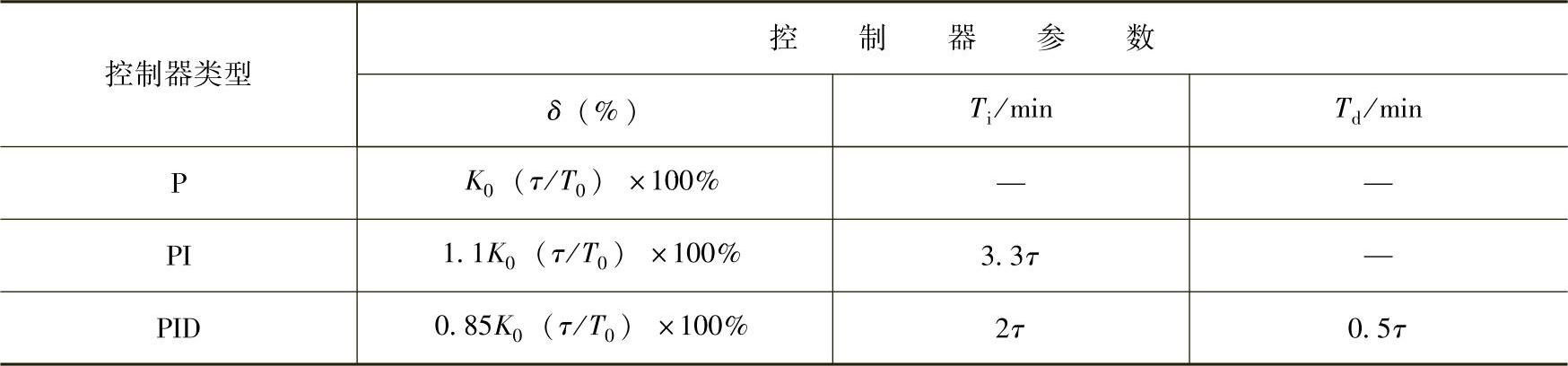
反应曲线法是根据广义对象的时间特性,通过经验公式求取。当操纵变量作阶跃变化时,被控变量随时间的变化曲线称为反应曲线。对自衡的非振荡过程,广义对象的传递函数常用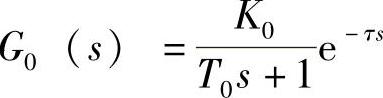 来近似,其中K0、τ和T0则可由反应曲线用图解法得出。控制器参数整定的反应曲线法是根据广义对象的K0、τ和T0确定控制器参数的方法。有了K0、τ和T0参数法,就可以根据表6-3中的经验公式,计算出满足4∶1衰减振荡的控制器整定参数。
来近似,其中K0、τ和T0则可由反应曲线用图解法得出。控制器参数整定的反应曲线法是根据广义对象的K0、τ和T0确定控制器参数的方法。有了K0、τ和T0参数法,就可以根据表6-3中的经验公式,计算出满足4∶1衰减振荡的控制器整定参数。
表6-3 反应曲线法控制器参数计算表(4∶1衰减比)
4.衰减曲线法的工程参数整定
该方法与临界比例度法的整定过程有些相似,方法是:在纯比例作用下,由大到小调整比例度以得到具有衰减比(4∶1)的过渡过程,记下此时的比例度δs及振荡周期Ts,根据经验公式,求出相应的积分时间Ti和微分时间Td,然后根据表6-4中相应的经验公式,求出控制器的整定参数。
表6-4 衰减曲线法控制器参数计算表(4∶1衰减比)

免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。