



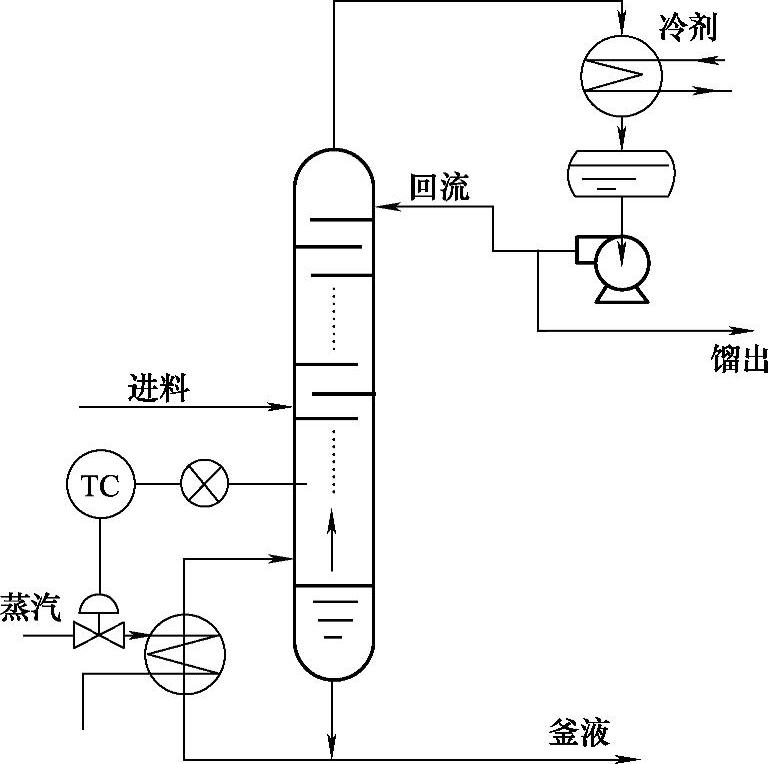
图6-1 生产控制系统
在生产过程的自动控制系统中,控制器是很重要的组成部分。控制器将系统被控量的测量值与设定值相比较,如果存在偏差,就按预先设置的不同控制规律,发出控制信号,去控制生产过程,使被控变量的测量值和设定值相等。控制器的输出信号随偏差信号的变化而变化的规律成为控制规律。常用的控制规律有如下几种:
比例作用:y=Kpe
比例积分作用:
比例微分作用:
比例积分微分作用:
式中 y——控制器的比例增益;
TI——控制器的积分时间;
TD——控制器的微分时间。
1.比例控制
比例控制的输出与输入的关系为(见图6-2)
y=Kpe
式中 y——控制器的输出;
e——控制器的输入;
Kp——比例增益,表征比例控制作用的强弱程度。
对于一个单回路调节系统,单纯的比例作用下:输出的波形与被调量的波形完全相似。
通常习惯用比例增益的倒数即比例度表示控制器的输入与输出之间的比例关系以及比例作用的强弱。比例度可表示为
δ=1/Kp
δ越大,比例控制作用越弱,δ越小,比例控制作用越强。
比例度的选择原则:若对象的滞后较小,时间常数较大以及放大倍数较小,那么可以选择小的比例度来提高系统的灵敏度,从而使过渡过程曲线的形状较好。反之,为保证系统的稳定性,就要选择大的比例度来保证稳定。
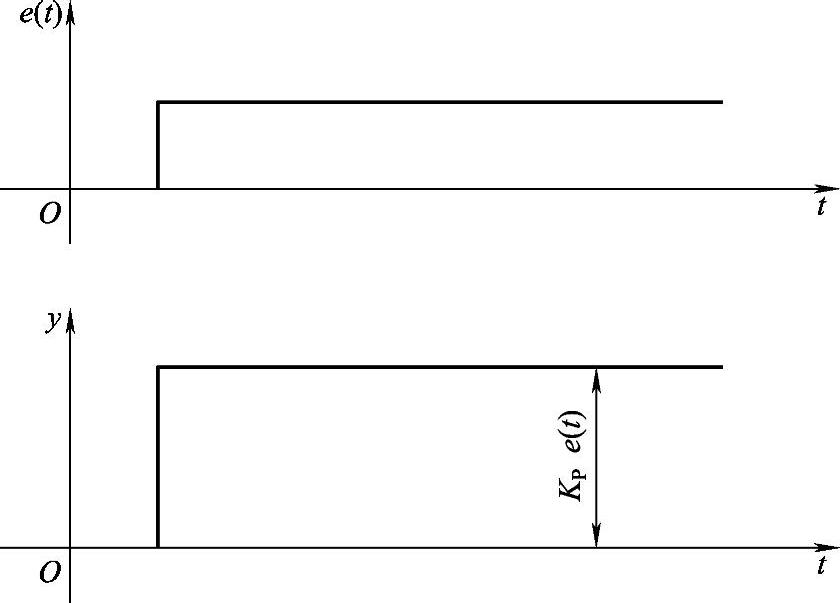
图6-2 比例控制器阶跃响应输入输出特性
2.积分控制
纯积分作用数学表达式为
式中 TI——积分时间,表示积分速度的大小和积分作用的强弱;
KI——控制器的积分速度(TI=1/KI)。
如果调节器的输入偏差不等于零,就让调节器的输出按照一定的速度一直朝一个方向累加下去。
单纯积分作用的特性总结如下:
1)输出的升降与被调量的升降无关,与输入偏差的正负有关;
2)输出的升降与被调量的大小无关;
3)输出的斜率与被调量的大小有关;
4)被调量不管怎么变化,输出始终不会出现阶跃扰动;
5)被调量达到顶点的时候,输出的变化趋势不变,速率开始减缓;
6)输出曲线达到顶点的时候,必然是输入偏差等于零的时候,积分作用能够消除余差,与比例控制相比,积分控制过渡过程比较缓慢。
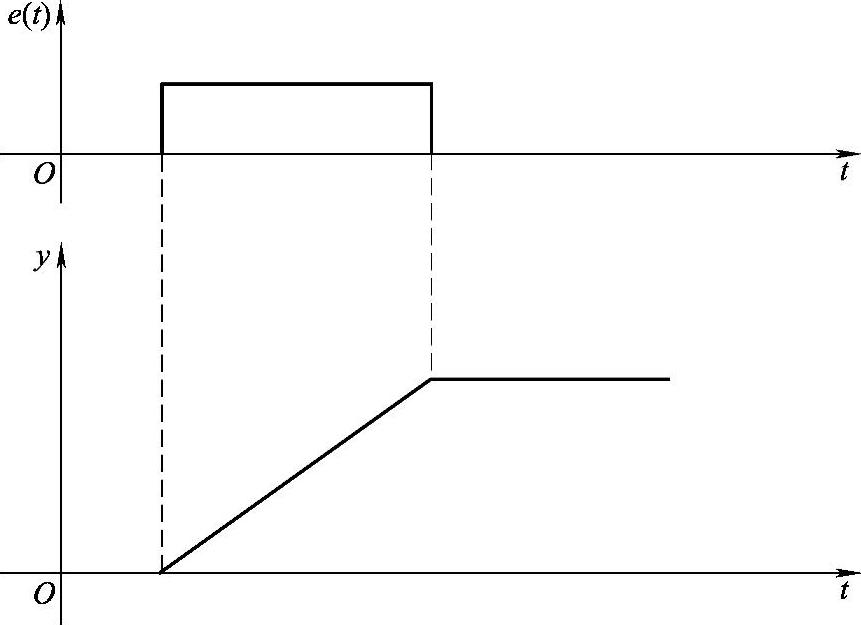
图6-3 积分控制器的输入输出特性
3.比例积分控制
PI控制器的输出随时间变化的表达式为
PI输出响应由比例和积分两部分组成。
在阶跃信号作用下(幅值为A)控制器的输出为
 (https://www.xing528.com)
(https://www.xing528.com)
由于比例作用的输出与输入偏差成正比,因此控制器一开始(t=0)的输出应该是阶跃变化,而此时积分作用的输出应该为零;当t>0时,偏差为一个恒值,其大小不再变化,所以比例输出也应是恒值,而积分输出则应以恒定的速度不断增大。积分作用的大小与积分速度KI成正比,而积分时间TI又是积分速度KI的倒数,因此积分作用的大小与积分时间TI成反比。积分常数越大,积分作用越小,反之,积分作用越大。
当t=TI时有,y=2KpA。因此,只要在输入发生阶跃变化(t=0)时,记下控制器输出变化的数值KpA,同时用秒表计时。当控制器的输出变化幅值达到2KpA时,秒表上的时间就是积分时间。
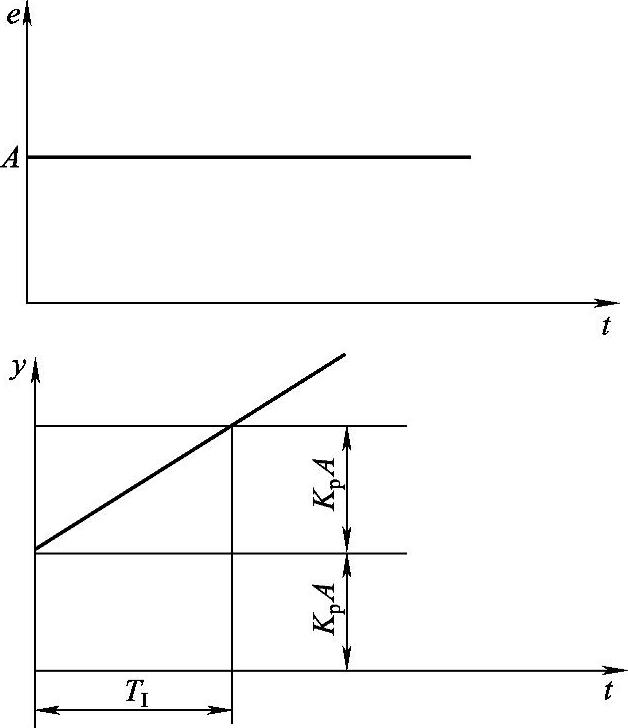
图6-4 比例积分控制器的输入输出特性
PI调节规律的计算举例
【例】 有一台PI调节器,比例度δ=50%,积分时间T=2min,开始时调节器P测量=P给定=P输出=50%,因控制产品质量需要,操作工突然把测量值由50%提至60%,问1min后输出变为多少?经过多少时间输出会变为18mA?
解:
所以当调节器是正作用时,1min后调节器的输出从原来的50%变化到80%,调节器是反作用时则从原来的50%变化到20%。
即17.5%=0.1t解之得t=1.75min。
4.微分控制
理想微分控制器的输出与输入信号的关系为
式中 Td——控制器的微分时间
同积分作用一样,我们之所以要把微分作用单独隔离开讲,就是为了理解的方便。一句话简述:被调量不动,输出不动;被调量一动,输出马上跳。在阶跃信号输入的瞬间,控制器的输出为无穷大,其余时间输出为零。
从图6-5所示的曲线,可以得出如下结论:
1)微分作用与被调量的大小无关,与被调量的变化速率有关;
2)与被调量的正负无关,与被调量的变化趋势有关;
3)如果被调量有一个阶跃,就相当于输入变化的速度无穷大,那么输出会直接到最小或者最大;
4)波动调节之后,输出还会自动拐回头。
理想的微分控制器是难以实现的,工业上的微分控制器使用实际的微分控制规律。实际的微分控制规律是由理想的比例微分环节和一阶滞后环节组合而成。虽然实际的微分控制器中也含有比例作用,但其比例度的大小是不能改变的,而比例作用又是控制作用中最基本、最重要的作用,对控制质量的影响很大。因此,通常也不单独使用实际的微分控制器,而是将其与比例或比例积分作用一起使用。
5.比例微分控制
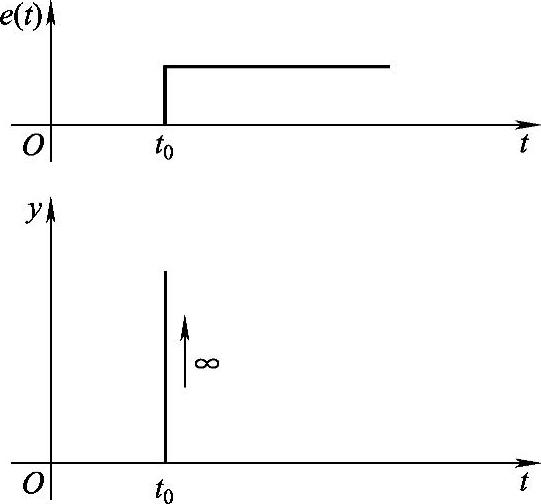
图6-5 微分控制器的输入输出特性
比例微分作用数学表达式如下:
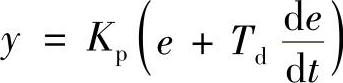
即比例微分控制器的输出是比例作用和微分作用两部分之和,其输入输出曲线如图所示。
与实际的微分控制一样,微分作用的大小由微分时间来衡量。图6-6所示为比例微分控制器输入输出特性。
使用微分作用时,要注意以下几点:
1)微分作用的强弱要适当。如果微分作用太弱,即微分时间Td太小,调节作用不够明显,对控制质量改善不大;但是微分时间Td太大,又会使调节作用过强,从而引起被控变量大幅度振荡。
2)微分作用适用于对象容量滞后较大的控制系统,如温度控制系统。对于这些系统,适当加入微分作用,可以使控制质量有较大程度的提高。但是,微分作用对于对象的时滞是不起作用的。
3)对于具有大噪声对象的控制系统,如流量控制系统,微分作用会把这些高频干扰放大的很大,从而降低了控制系统的调节质量,因此一般不引入微分作用。
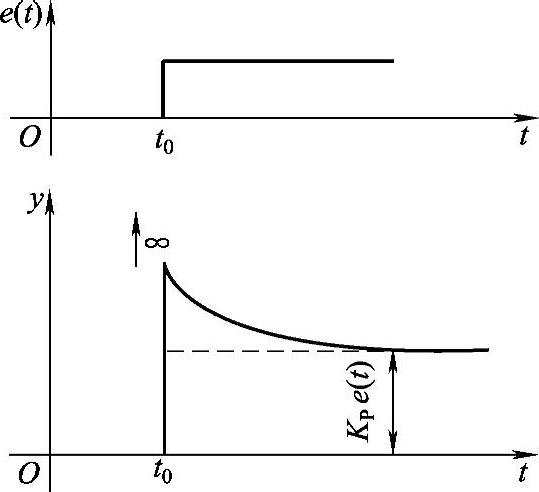
图6-6 比例微分控制器 输入输出特性
6.比例积分微分控制规律
为了进一步改善调节品质,往往把比例、积分、微分三种作用组合起来,形成PID调节器,其数学表达式为

PID控制规律吸取了比例控制的快速反应功能、积分控制的了消除余差功能和微分控制的预测功能,从控制效果看,是比较理想的一种控制规律。阶跃响应特性可以看作是PI阶跃响应曲线PD阶跃响应曲线的叠加。图6-7所示为比例积分微分控制器的输入输出曲线。
从图中可以看到,比例作用是始终起作用的基本力量;微分作用在偏差出现的一开始有很大的输出,具有超前作用,然后逐渐消失;积分作用则在开始时作用不明显,随着时间的推移,其作用逐渐增大,起主要控制作用,直到余差消失为止。
比例积分微分控制器有三个参数可以选择:比例度δ,积分时间Ti,微分时间Td。δ越小,比例作用越强;Ti越小,积分作用越强;Td越大,微分作用越强。把微分时间调整到零,就成了比例积分控制器;把积分时间调整到无穷大,则成了比例微分控制器。
PID三作用控制器虽然性能效果比较理想,但并非任何情况下都可采用PID三作用控制器。因为PID三作用控制器需要整定比例度、积分时间和微分时间三个变量,而在实际工程上是很难将这三个变量都整定到最佳值。
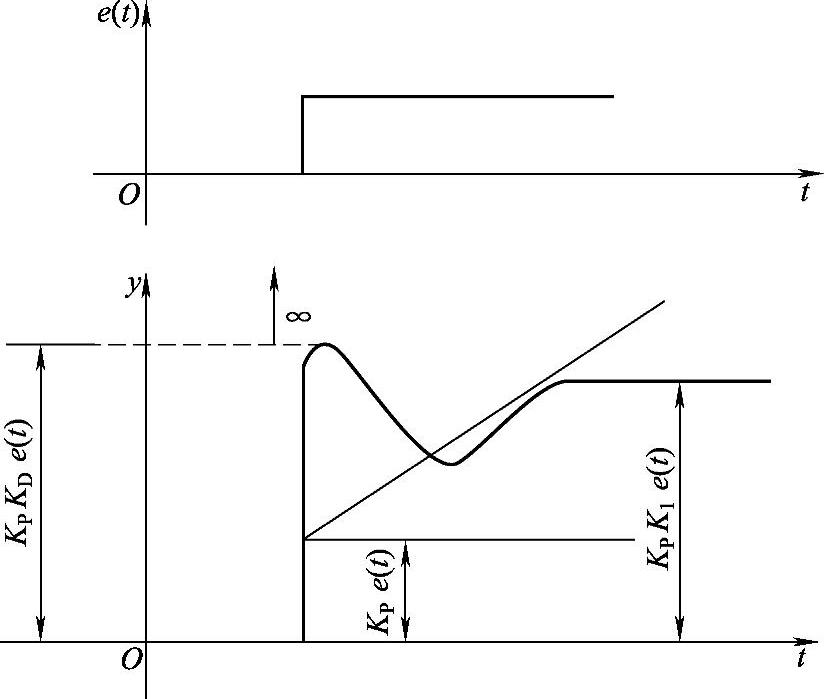
图6-7 比例积分微分控制器输入输出特性
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。