



【摘要】:机器人用RV传动是20世纪80年代日本研制用于机器人关节的传动装置,是在针摆传动基础上发展起来的一种新型传动。图10-4是RV传动简图,它由渐开线圆柱齿轮行星减速机构和摆线针轮行星减速机构两部分组成。渐开线行星轮2与曲柄轴3连成一体,作为摆线针轮传动部分的输入。RV传动作为一种新型传动,从结构上看,其基本特点可概括如下:1)如果传动机构置于行星架的支承主轴承内,那么这种传动的轴向尺寸大大缩小。
机器人用RV(Rot-Vector)传动是20世纪80年代日本研制用于机器人关节的传动装置,是在针摆传动基础上发展起来的一种新型传动。图10-4是RV传动简图,它由渐开线圆柱齿轮行星减速机构和摆线针轮行星减速机构两部分组成。渐开线行星轮2与曲柄轴3连成一体,作为摆线针轮传动部分的输入。如果渐开线太阳轮1顺时针方向旋转,那么渐开线行星齿轮在公转的同时还有逆时针方向自转,并通过曲柄轴带动摆线轮作平面运动。此时,摆线轮因受与之啮合的针轮的约束,在其轴线绕针轮轴线公转的同时,还将反方向自转,即顺时针转动。同时,它通过曲柄轴推动行星架输出机构顺时针方向转动。
RV传动作为一种新型传动,从结构上看,其基本特点可概括如下:
1)如果传动机构置于行星架的支承主轴承内,那么这种传动的轴向尺寸大大缩小。
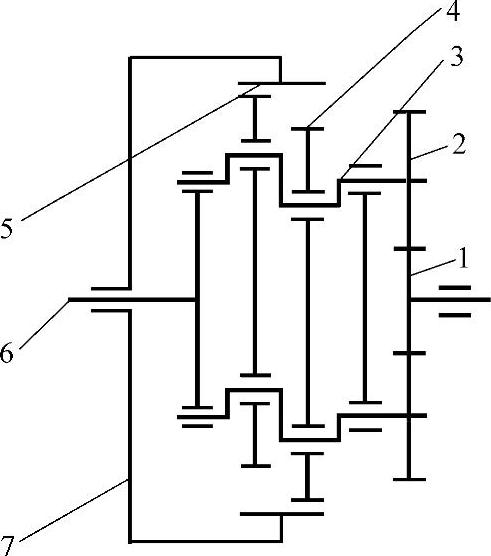
图10-4 RV传动简图
1—太阳轮 2—行星轮 3—曲柄轴 4—摆线轮 5—针齿 6—输出轴 7—针齿壳
注:传动比i16: ,其中z5=z4+1z4—摆线针轮齿数,z5—针齿数。(https://www.xing528.com)
,其中z5=z4+1z4—摆线针轮齿数,z5—针齿数。(https://www.xing528.com)
2)采用二级减速机构,处于低速级的针摆传动更加平稳,同时,转臂轴承因个数增多且内外环相对转速下降,其寿命也可大大提高。
3)只要设计合理,就可获得很高的运动精度和很小的回差。
4)RV传动的输出机构是采用两端支承的尽可能大的刚性圆盘输出结构,比一般摆线减速器的输出机构(悬臂梁结构)具有更大的刚性,且抗冲击性能也有很大提高。
5)传动比范围大,其传动比i=31~171。
6)传动效率高,其传动效率η=0.85~0.92。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。