



为了使创新的摆线针轮行星减速器既保持传统摆线针轮行星减速器的诸多优点,又可以更充分发挥其承载能力,关键的措施就是如何使转臂轴承的径向尺寸不受限制,可以根据额定动负荷的需要,自由选择。
大连交通大学齿轮研究中心何卫东教授、李力行教授和美国马里兰大学中国研究生李欣经过深入研究,优选出一种可以解决上述难题的设计方案——双曲柄环板式针摆行星传动。
双曲柄环板式针摆行星传动的机构简图如图10-3所示。在平行四杆机构ABCD的连杆BC上,装有针轮2,其中心Op位于连杆BC的中点。与针轮2相啮合的摆线轮g中心Og位于主、从动曲柄回转中心A、D连线AD的中点,主、从动曲柄的长度l的大小等于针轮与摆线轮中心距OpOg。由于在平行四杆机构ABCD中,连杆作平动,其上各点轨迹形状、速度、加速度相等,所以固连于连杆BC上的针轮2轮心Op轮轨迹必是以Og为圆心,以l为半径的圆。
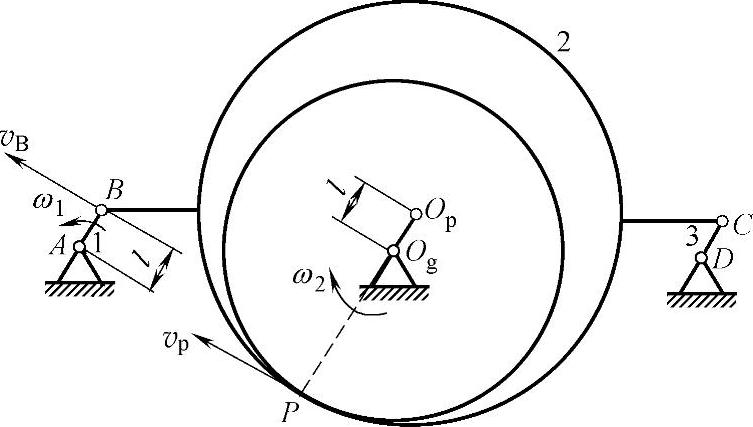
图10-3 双曲柄环板式针摆行星传动机构简图
设针轮2与摆线轮的节圆半径分别为rp与rg,则rp-rg=l。
设主动曲柄1的角速度为ω1,则连杆2与主动曲柄1铰接点B处的速度vB大小应为vB=ω1l,其方向为垂直曲柄AB的方向,指向应与ω1的转向一致。
由于连杆作平动,其上各点的速度大小与方向均相同,所以固连于连杆BC上的针轮2在与摆线轮啮合点P处的速度vp=vB,由此可得
ω2rg=ω1l
式中 ω2——摆线轮和输出轴的角速度。
以l=rp-rg代入上式,得
式中 zg——摆线轮齿数;
zp——针轮齿数。(https://www.xing528.com)
由图10-3可以看出,摆线轮和针轮在啮合处P点的速度方向要与vB相同,而摆线轮绕Og的转动方向必与主动曲柄绕A的转动方向相反。即若转向ω1为逆时针,则ω2的转向必为顺时针。为此,双曲柄环板式针摆行星传动的传动比计算公式应写为
(1)创新传动——双曲柄环板式针摆行星传动的可行方案 由图10-3可知,创新的双曲柄环板式针摆行星传动与传统的摆线针轮行星传动在传动方式上的最大区别在于:传统的摆线针轮行星传动是针轮固定,与之啮合的两片摆线轮(行星轮)作行星运动,通过销孔式输出机构将减速增矩后的动力传到输出轴(见图10-1、图10-2);而创新的传动是将双曲柄平行四杆机构与摆线针轮传动巧妙地结合,以装于输入轴上的曲柄为主动,带动装于连杆上的针轮(行星轮)作各点轨迹均为圆的平动,针轮上的针齿拨动装于输出轴上的绕固定轴线回转的摆线轮(中心轮),而带动输出轴转动。创新传动不仅省去了输出机构,输出轴刚性增强,而且在创新传动中,支承行星轮的转臂轴承(即曲柄与连杆铰接处的轴承),由行星轮内移至行星轮外,并由传统结构中只有一组转臂轴承变为在创新结构中有两组转臂轴承,且可以不受任何限制地按工作需要选用。当然,转臂轴承也就不再成为限制整机承载能力的薄弱环节。正是因为这一重要的变化,在同样针齿中心圆直径与相近传动比的条件下,创新传动整机所传递的转矩和功率可以比传统摆线针轮行星传动增大1倍(双环板)至3倍(四环板)。
由于创新传动是双曲柄平行四杆机构与摆线针轮传动的结合,也产生一个新的技术问题。这就是,不仅当以两个曲柄中的一个曲柄为原动曲柄时,要让另一个被动曲柄顺利同步通过死点必须有可靠的技术保证措施,而且当两个曲柄均为主动时,让两个主动曲柄同步也必须有可靠的技术保证措施。有鉴于此,创新传动提出了下述7种可行方案:①一种用同步带联动双曲柄的双环板式针摆行星减速器;②一种用同步带联动双曲柄的四环板式针摆行星减速器;③一种用双电动机驱动双曲柄的四环板式针摆行星减速器;④一种输入轴与输出轴同轴线的,用3个齿轮联动双曲柄的四环板式针摆行星减速器;⑤一种输入轴与输出轴不同轴线的,用3个齿轮联动双曲柄的四环板式针摆行星减速器;⑥一种输入轴与输出轴同轴线的,用3个齿轮联动双曲柄的双环板式针摆行星减速器;⑦一种输入轴与输出轴不同轴线的,用3个齿轮联动双曲柄的双环板式针摆行星减速器。
(2)创新传动的性能特点
1)传统的摆线针轮行星减速器为一组转臂轴承处于摆线轮输出机构之内,径向尺寸受限制,严重地制约了整机承载能力的发挥;创新的双曲柄环板式针摆行星减速器,转臂轴承为两组,且处于针轮之外,径向尺寸不受限制,可以按照要求选用。这样,就可以使整机的承载能力得以充分发挥。在同样针齿中心圆直径和相近传动比的条件下,所传递的转矩与功率增大1倍(双环板)至3倍(四环板)。
2)传统的摆线针轮行星减速器,将行星轮的运动传至输出轴,必须通过一个输出机构(见图10-2),输出轴相当于悬臂梁受力;创新的双曲柄环板式针摆行星传动,不用输出机构,摆线轮装于相当于简支梁的输出轴上,输出轴的刚性很大,这也有利于整机承载能力的发挥。
该新型传动研制成功,将为国民经济各工业部门提供一种具有体积小、质量轻、传动比范围大、传动效率高、传动平稳、结构简单等一系列优点而传递的转矩和功率还可以较传统摆线针轮行星传动成倍增大的新型摆线针轮行星传动。由于其转臂轴承承载能力、输出轴刚度都比传统的针摆行星减速器大得多,因此,该创新研究目标有一项很具体的指标,就是新型传动在同样针齿中心圆直径和相近的传动比条件下,和日本当代最先进的传统摆线针轮行星减速器进行比较,其传递的功率与转矩可以增大1倍(双环板)至3倍(四环板)。这一成果预期可以成为钢铁、石油、化工、起重运输、建筑、机床、橡胶塑料、水处理、食品、纺织及国防等各工业领域机械设备的先进减速传动装置。
(3)创新传动的结构优化设计 结构优化设计需要考虑多方面的要求,其中最重要的两点:首先,是要实现高承载能力、高传动效率、高可靠性的工作需要;其次,是要具有好的制造和装配工艺性。在这一原则指导下,在7种可行方案中,选择了下面3种有代表性的方案进行了结构优化设计。
1)同步带联动双曲柄双环板式针摆行星减速器。
2)双电动机驱动双曲柄四环板式针摆行星减速器。
3)三齿轮联动双曲柄四环板式针摆行星减速器。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。