



1.传动比的计算
(1)K-H-V型少齿差传动的传动比计算
1)当内齿圈固定时的传动比计算。内齿圈固定时,即n2=0(见图9-1),高速轴(偏心轴)输入,行星轮z1的低速自转速度输出,计算传动比iH1,应用相对速度法(亦称转臂固定法),则
则
从式(9-1)可知,为了获得大的传动比,z1越大越好,内外齿轮的齿数差越小越好。当z1一定时,则z2-z1=1时,传动比为最大。少齿差行星减速器可按实际需要,做成1、2或3、4齿差形式。公式前的负号表示输出与输入转向相反。
2)当内齿圈输出时的传动比计算。输出轴固定,高速轴(行星架或转臂)输入,内齿圈输出(见图9-7),这时行星轮只作平动,不作转动,即n1=0,计算传动比iH2

则
从式(9-2)可知,z2越大,z2-z1越小,则获得的传动比越大。此时,输出与输入转向相同。
(2)双内啮合2K-H(NN)型少齿差传动的传动比计算
1)内齿圈4固定,即n4=0,行星轮2与行星轮3连为一体,转速n2=n3,外齿轮1与低速轴一起输出(见图9-12),则
z4-z3>0,z2-z1>0
从式(9-3)可知,齿数差确定后,可调整轮1与3,或轮2与4的齿数来获得所需的传动比。输出与输入转向相反。
2)将图9-12中的外齿轮1固定,即n1=0,行星轮2与行星轮3呈一体,即n2=n3,内齿圈4输出,计算传动比iH4
则
z4-z3>0,z2-z1>0
从式(9-4)可知,作为输出的内齿圈4的转向与输入轴转向相同。
3)内齿圈4固定,即n4=0,行星轮2与3呈一体,其转速n2=n3,内齿轮1作为低速轴输出(见图9-13),其传动比的计算公式与式(9-3)相同,即

这种传动形式根据z1与z4选取的不同,可设计成输出轴的转向与输入轴的转向相同或相反,并且可将齿轮搭配得使(z2z4-z1z3)值很小,从而可获得比2K-H(NN)型传动更大的传动比。(https://www.xing528.com)
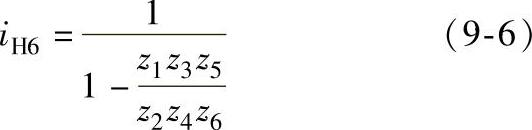
(3)三内啮合少齿差传动的传动比计算 图9-14所示为三内啮合少齿差减速器,外齿轮1固定,即n1=0,内齿圈2与3连在一起组成双联行星内齿轮,即n2=n3,行星轮4与5呈一体组成双联齿轮,即n4=n5,内齿圈6输出,计算传动比iH6
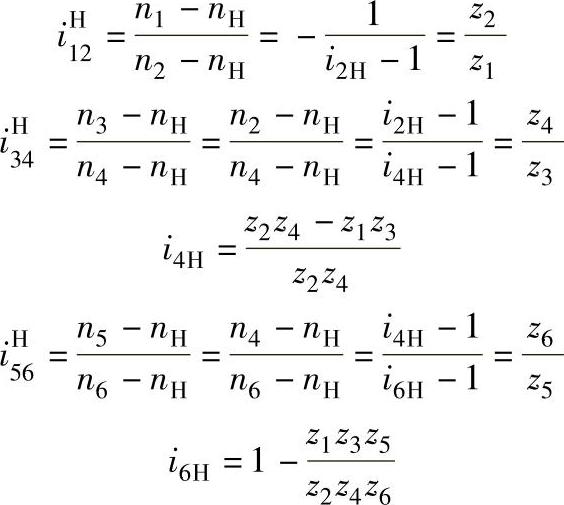
如果传动中的所有齿轮都具有相同的径节,为了能够正确地啮合则必须遵循下列关系
z2-z1+z6-z5=z3-z4
即 z1+z3+z5=z2+z4+z6(9-7)
根据式(9-6)可以组成内齿轮副的任何配置方案,但必须保证3、4内齿轮副的中心距为1、2与5、6齿轮副的中心距之和。
(4)锥齿少齿差传动的传动比计算 图9-16为锥齿少齿差传动简图,其结构图如图9-15所示,齿轮z1与z3做成一体,齿轮z2固定,齿轮z4输出,其传动比计算式为

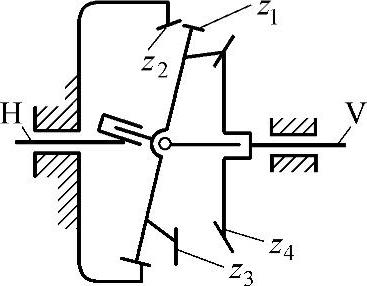
图9-16 锥齿少齿差传动简图
2.效率计算
(1)效率计算公式 见表9-1。
表9-1 效率计算公式


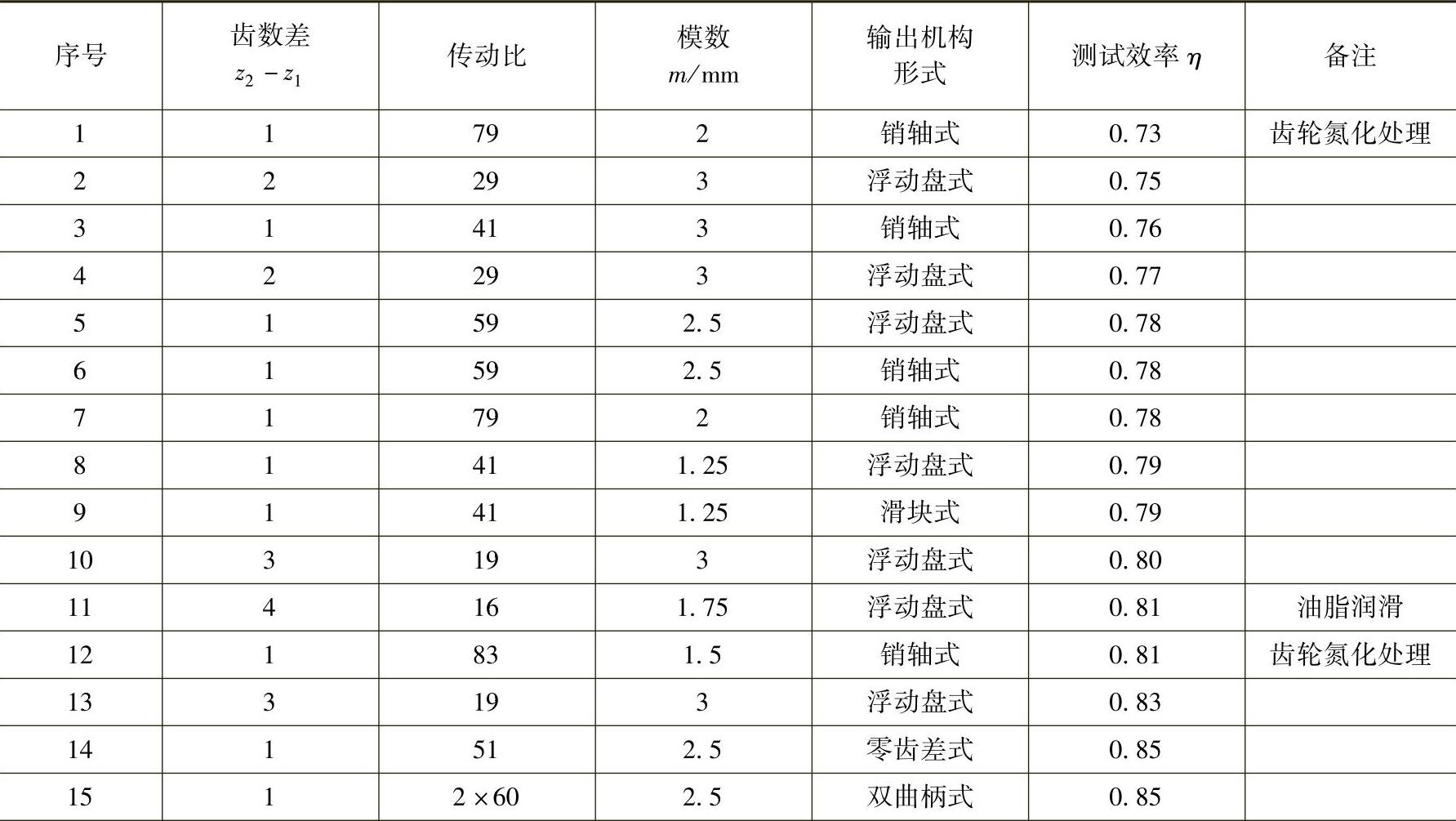
(2)实测效率 国内一些单位对K-H-V(N)型传动装置进行效率实测,测得结果列于表9-2。
表9-2 K-H-V(N)型渐开线少齿差行星减速器实测效率
(续)

免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。