



图8-1所示为最常用的3K型行星轮系,它由高速级2K-H(NGW)型和低速级2K-H(NN)型组成。所以,3K型行星轮系的配齿数可转化为两级串联的2K-H型行星轮系的配齿数问题,即可应用前面介绍的2K-H型配齿方法。由于3K型是由两个2K-H型串联组成的,所以3K型配齿数时,除将两级分别满足传动比、同心、邻接和装配四个约束条件外,还需考虑两级间的联系问题,如两级传动比如何分配;两级之间因有公用的齿轮副,需要满足共同的同心条件等。所以,3K型行星轮系配齿数时要稍复杂一些。
通常取za、zb、ze为行星轮个数np的整数倍,而且各齿轮的模数均相等。在3K型传动中,除要求输入轴和输出轴回转方向相反而采用zb<ze外,一般推荐用zb>ze。在同样条件下,后者比前者的承载能力大,且 时,齿轮圆周速度和行星架转速均略有降低。
时,齿轮圆周速度和行星架转速均略有降低。
在最大齿数相同的条件下,当zg=zf时,能获得较大的传动比,且制造方便,减少装配误差,使各行星轮之间载荷分配均匀。此外,相啮合的齿轮齿数间没有公因数的可能性比zg≠zf时为小,因而提高了传动的平稳性。但存在变位困难(尤其是np较大时)的缺点,计算所得的齿数是否好用,通常在变位计算后才能确定。
3K型配齿数时,首先应解决传动比分配问题,然后才能对两级2K-H型分别进行配齿数。分配传动比主要应满足两级之间共同的同心条件(即两级之是的主要联系)来进行。下面按由NGW型和NN型串联组成的、最常用的3K型进行分析,介绍其配齿数的方法。
高速级2K-H(NGW)型的齿数和为

低速级2K-H(NN)型的齿数和为
移项得

该两级应满足共同的同心条件为
又因

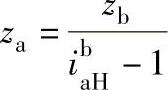
由式(8-4)、式(8-5)解得
当给定3K型传动比 ,选取zb和e后,可按式(8-4)、式(8-5)分配其传动比。
,选取zb和e后,可按式(8-4)、式(8-5)分配其传动比。
关于如何选取zb和e值,通过理论分析和配齿实践可以得到。
设先给定zb,随着 的增大,za就趋于减少。当选取e值偏大时,也会导致za减少,所以在传动比偏大时,应取偏小的e值,以免za过小而造成根切。
的增大,za就趋于减少。当选取e值偏大时,也会导致za减少,所以在传动比偏大时,应取偏小的e值,以免za过小而造成根切。
设先给定za,随着 的增大,zb就趋于增多。当选取e值偏大时,也会导致zb增多,所以在传动比偏大时,应取较小的e值,以免zb过大而使轮廓尺寸增大。
的增大,zb就趋于增多。当选取e值偏大时,也会导致zb增多,所以在传动比偏大时,应取较小的e值,以免zb过大而使轮廓尺寸增大。
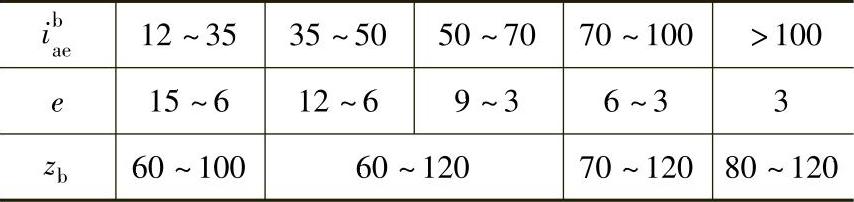
通过理论分析和实践经验,推荐表8-2,供3K型配齿数时选取e值和zb值参考用。
表8-2 3K型行星齿轮传动配齿数时的e、zb值选取
由于3K型行星轮系的传动比较大,为了能满足邻接条件,一般取行星轮个数np=3。
为了方便配齿数,易于满足装配条件,故配齿时一般都取中心轮齿数及e值为np=3的倍数。
下面就这种简便的配齿数方法,列出其配齿数的步骤及配齿公式。
根据传动比 的大小,查表8-2选取合适的zb值及e值。若传动比
的大小,查表8-2选取合适的zb值及e值。若传动比 为负值时,取e为负值。
为负值时,取e为负值。
分配传动比

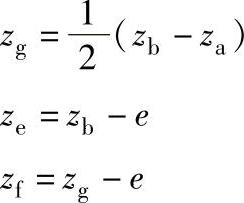
计算各轮齿数
 (四舍五入取整数)
(四舍五入取整数)
装配条件要求za值应为np=3的倍数,如果非角度变位,还要求za应与zb同为奇数或偶数,以满足同心条件。角度变位则无此要求。如果计算的za值没有满足上述要求,则应重新选取zb或e值进行计算。
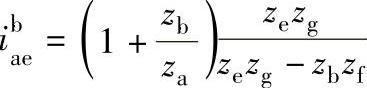
验算传动比
必要时验算邻接条件,根据 及
及 比值查表6-7校核邻接条件。
比值查表6-7校核邻接条件。
例8-2 已知3K型行星轮系, ,np=3,试配齿数。
,np=3,试配齿数。
解 1)由 ,查表8-2,选取zb=105,e=3。
,查表8-2,选取zb=105,e=3。
2)分配传动比
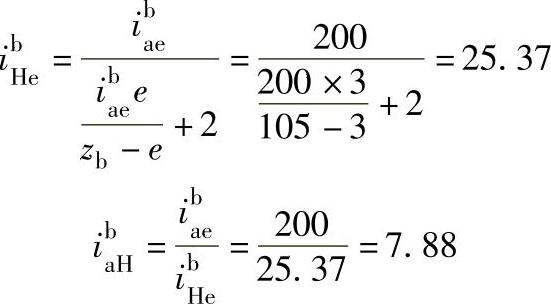
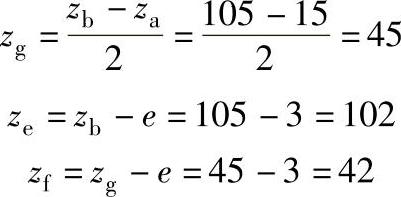
3)计算各齿轮齿数

za=15既是np=3的倍数,又与zb一样同为奇数。
4)验算传动比
5)检验邻接条件
由 及
及 ,查表6-7满足邻接条件。
,查表6-7满足邻接条件。
结果:za=15,zb=105,ze=102,zg=45,zf=42, 。
。
例8-3 已知3K型行星轮系 ,np=3,试配齿数。
,np=3,试配齿数。
解 1)由 ,查表8-2选取zb=96,e=-12。(https://www.xing528.com)
,查表8-2选取zb=96,e=-12。(https://www.xing528.com)
2)分配传动比
3)计算各轮齿数

取za=21(为np=3的倍数),
取zg=37,zf=49(同时减半个齿,然后用角度变位来满足同心条件),则
ze=zb-e=96-(-12)=108
4)验算传动比

5)检验邻接条件
根据 及
及 ,查表6-7满足邻接条件。
,查表6-7满足邻接条件。
结果:za=21,zb=96,ze=108,zg=37,zf=49, 。
。
在3K型行星齿轮传动中,可使行星轮齿数zf=zg,这时可采用角度变位来保证同心条件,
 ,以致可大大简化行星轮的加工工艺,无需对齿槽,也不必为了轮齿的滚切和磨削而采用分开式的行星轮结构。由于消除了行星轮齿圈zf和zg的角度位置误差,故可提高齿轮传动的精度。但是单齿圈行星轮的3K型传动,当不能避免使变位系数和很大(x∑>1)时,由于啮合线的工作区偏离节点和滑动速度增大,其效率将略有降低。
,以致可大大简化行星轮的加工工艺,无需对齿槽,也不必为了轮齿的滚切和磨削而采用分开式的行星轮结构。由于消除了行星轮齿圈zf和zg的角度位置误差,故可提高齿轮传动的精度。但是单齿圈行星轮的3K型传动,当不能避免使变位系数和很大(x∑>1)时,由于啮合线的工作区偏离节点和滑动速度增大,其效率将略有降低。
当行星轮齿数zf=zg时,其传动比为

据各行星轮能均匀装入中心轮a、b和e之间的要求,即应满足如下的装配条件:

式中 np——行星轮个数,一般取np=3。
由式(8-7)可知,欲使3K型传动的传动比 增大,使结构紧凑,就应尽量减小ze与zb的差值。但从满足装配条件来看,它们的最小差值应为
增大,使结构紧凑,就应尽量减小ze与zb的差值。但从满足装配条件来看,它们的最小差值应为
ze-zb=np(8-9)
将式(8-9)代入式(8-7),则得

所以

且有 zb=ze-np
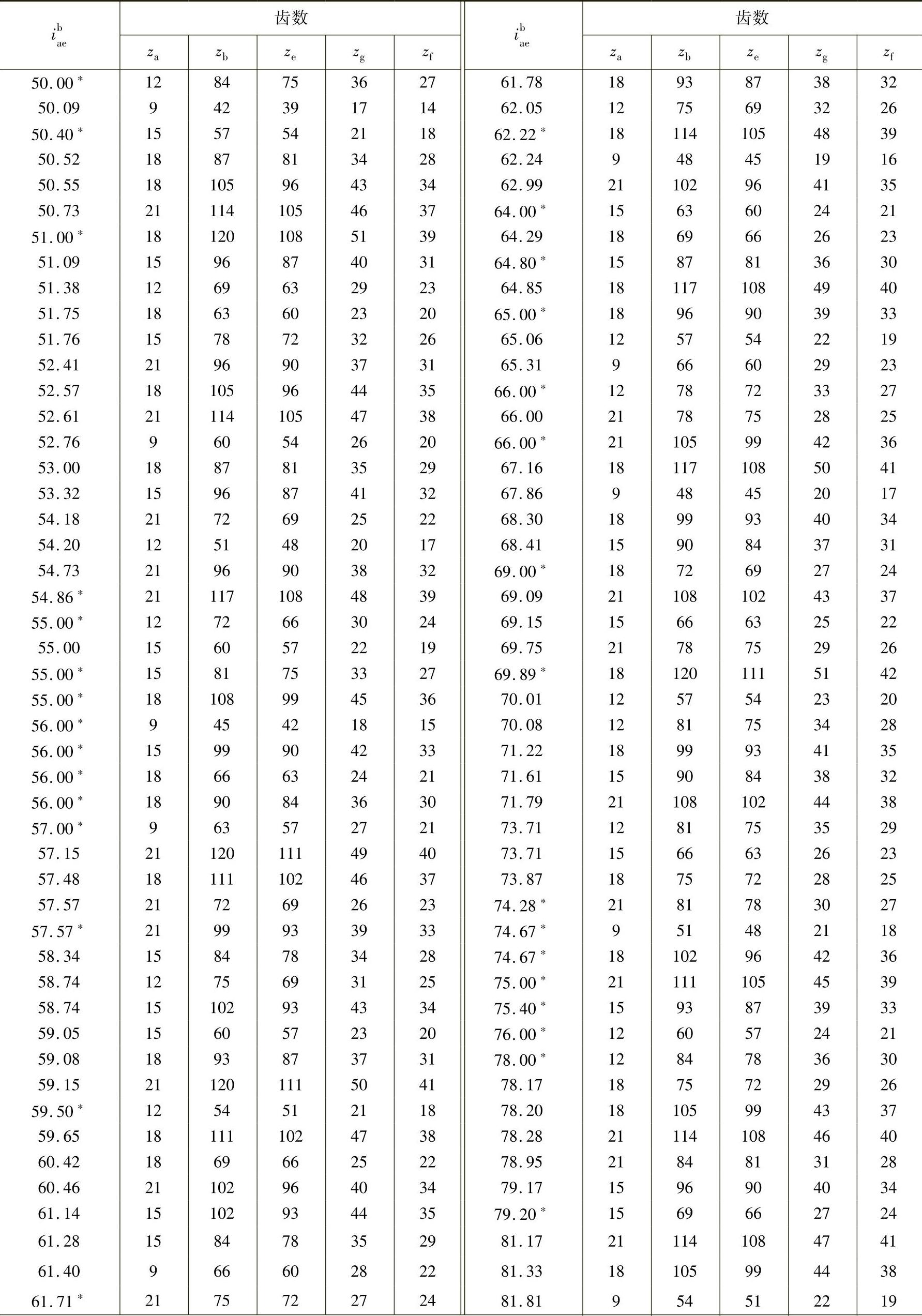
内齿圈b固定时,按传动比 确定3K型行星齿轮传动的齿数,见表8-3。
确定3K型行星齿轮传动的齿数,见表8-3。
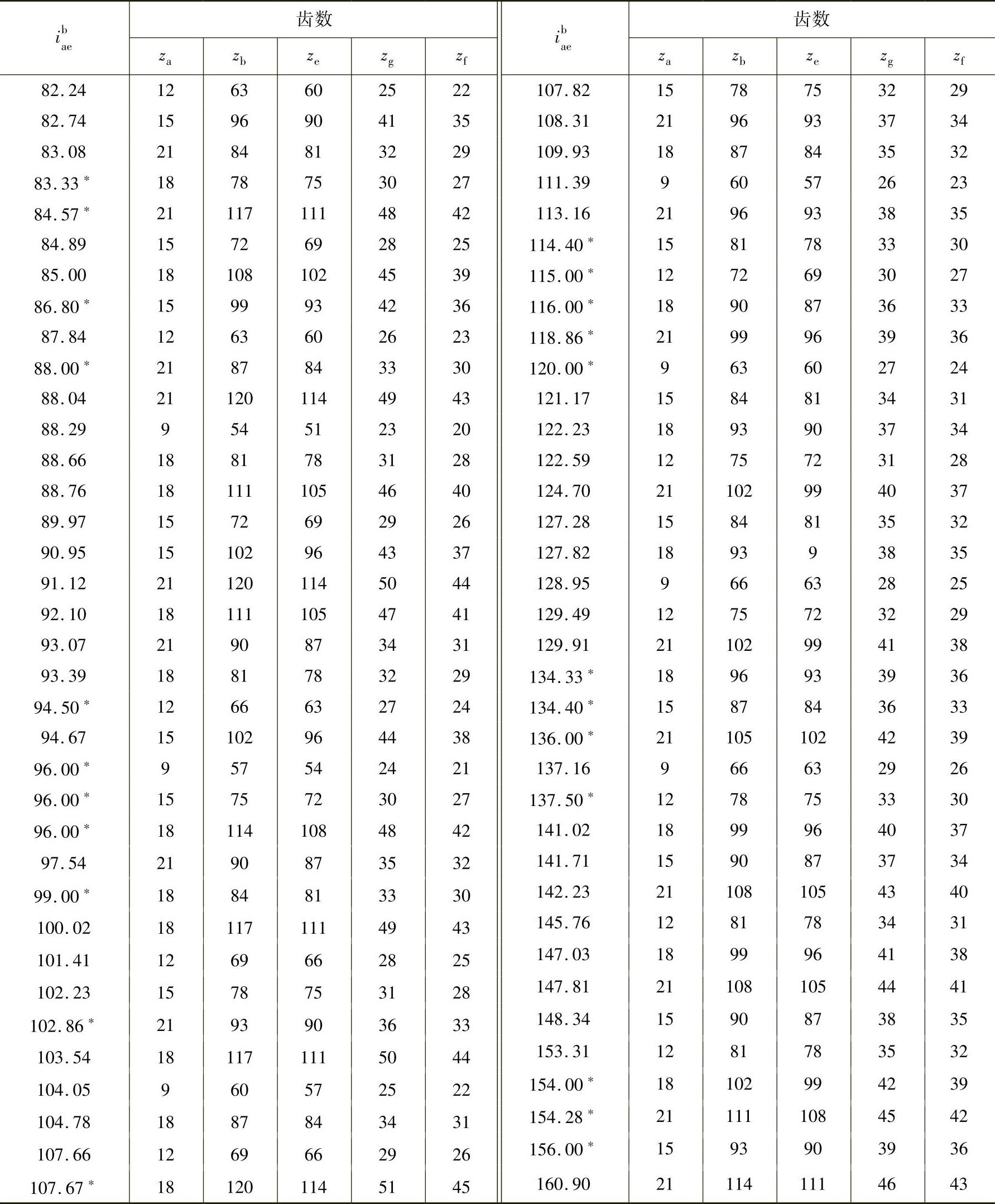
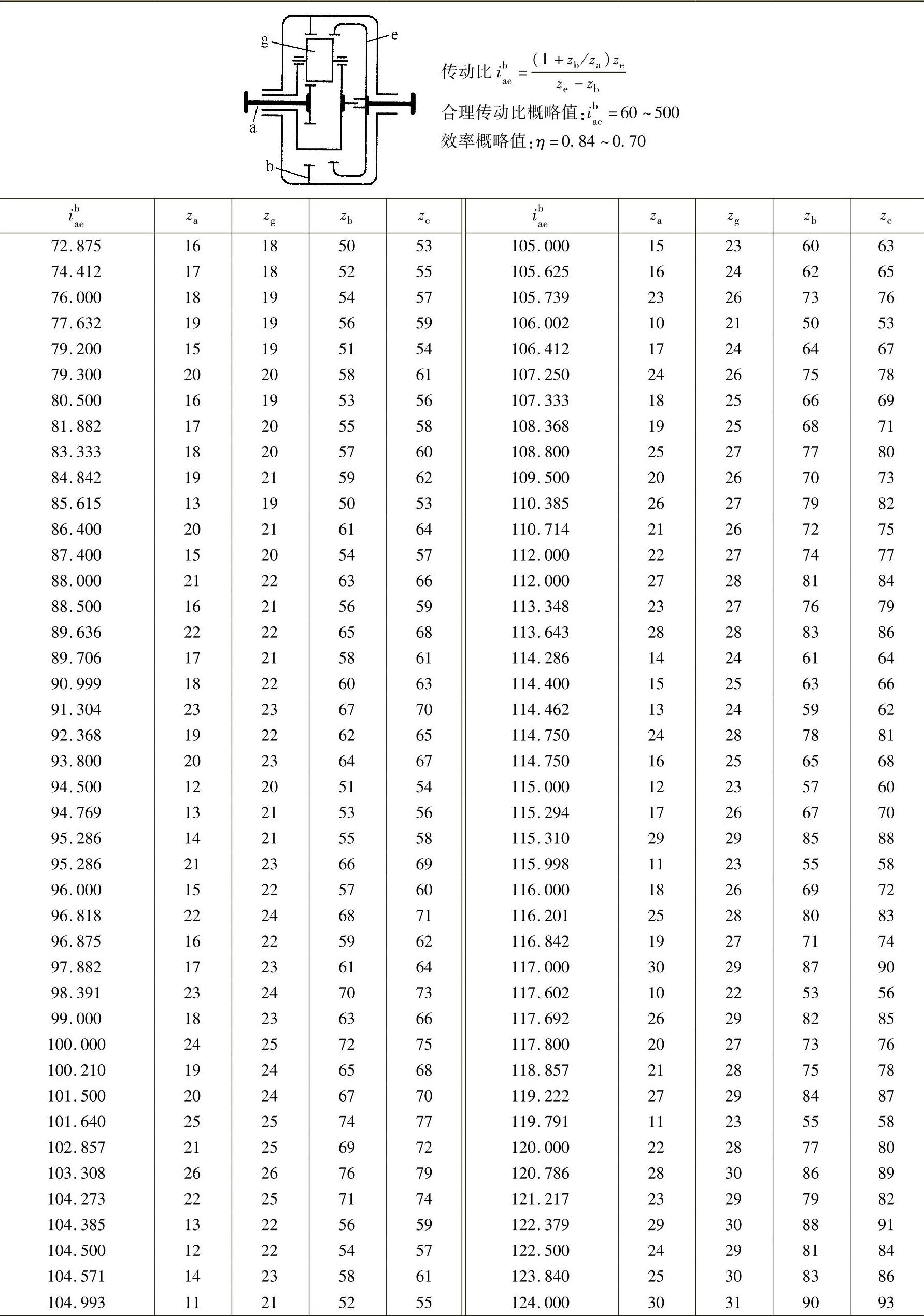
按传动比 确定单齿圈行星轮的3K型行星齿轮传动的齿数,见表8-4。
确定单齿圈行星轮的3K型行星齿轮传动的齿数,见表8-4。
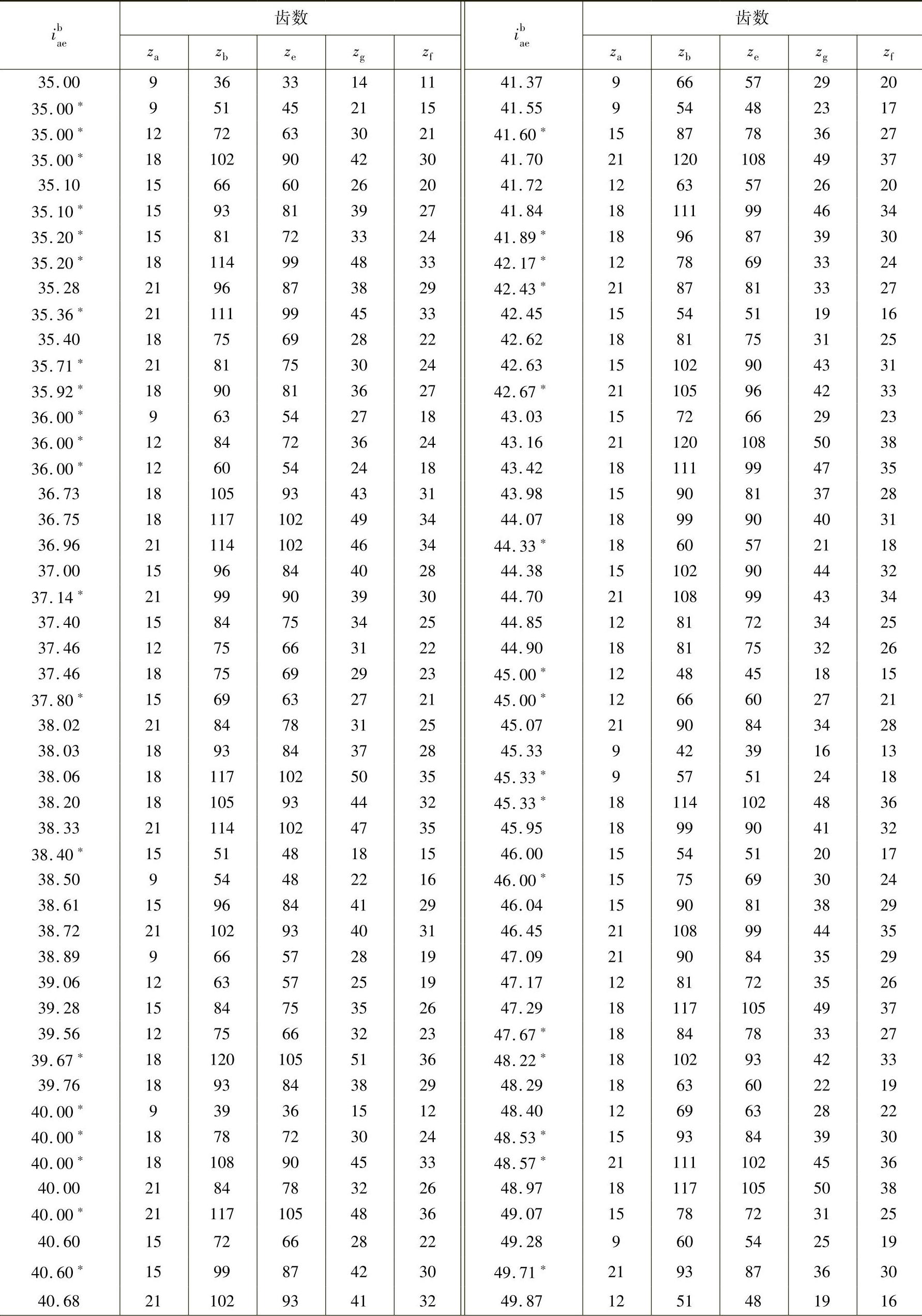
表8-3 内齿圈b固定时,按传动比 e确定3K型行星齿轮传动的齿数
e确定3K型行星齿轮传动的齿数

(续)
(续)
(续)
注:1.本表所有齿轮的模数均相同,mta=mtb=mte。
2.标有“∗”号的传动中za+zg=zb-zg=ze-zf,因此 和xa+xg=xb-xg=xe-xf。
和xa+xg=xb-xg=xe-xf。
3.在所有情况下,za、zb和ze都是3的倍数(在某些情况下也是2的倍数),因此本表可用于行星轮数具有np=3的传动(有时np=2亦适用)。
4.在所有情况下,zb-zg=ze-zf,因此(αt′)b=(αt′)e,xb-xg=xe-xf。
5.在所有情况下,zb>ze,zg>zf,zg>za。
6.表中 值只有正值,因此,中心轮a和e的旋转方向相同。
值只有正值,因此,中心轮a和e的旋转方向相同。
7.表中 值精确到小数点后第二位,当传动需要更准确的传动比数值时,应按表中3K传动的公式确定。
值精确到小数点后第二位,当传动需要更准确的传动比数值时,应按表中3K传动的公式确定。
表8-4 按传动比 确定单齿圈行星轮的3K型行星齿轮传动的齿数(np=3)
确定单齿圈行星轮的3K型行星齿轮传动的齿数(np=3)
(续)
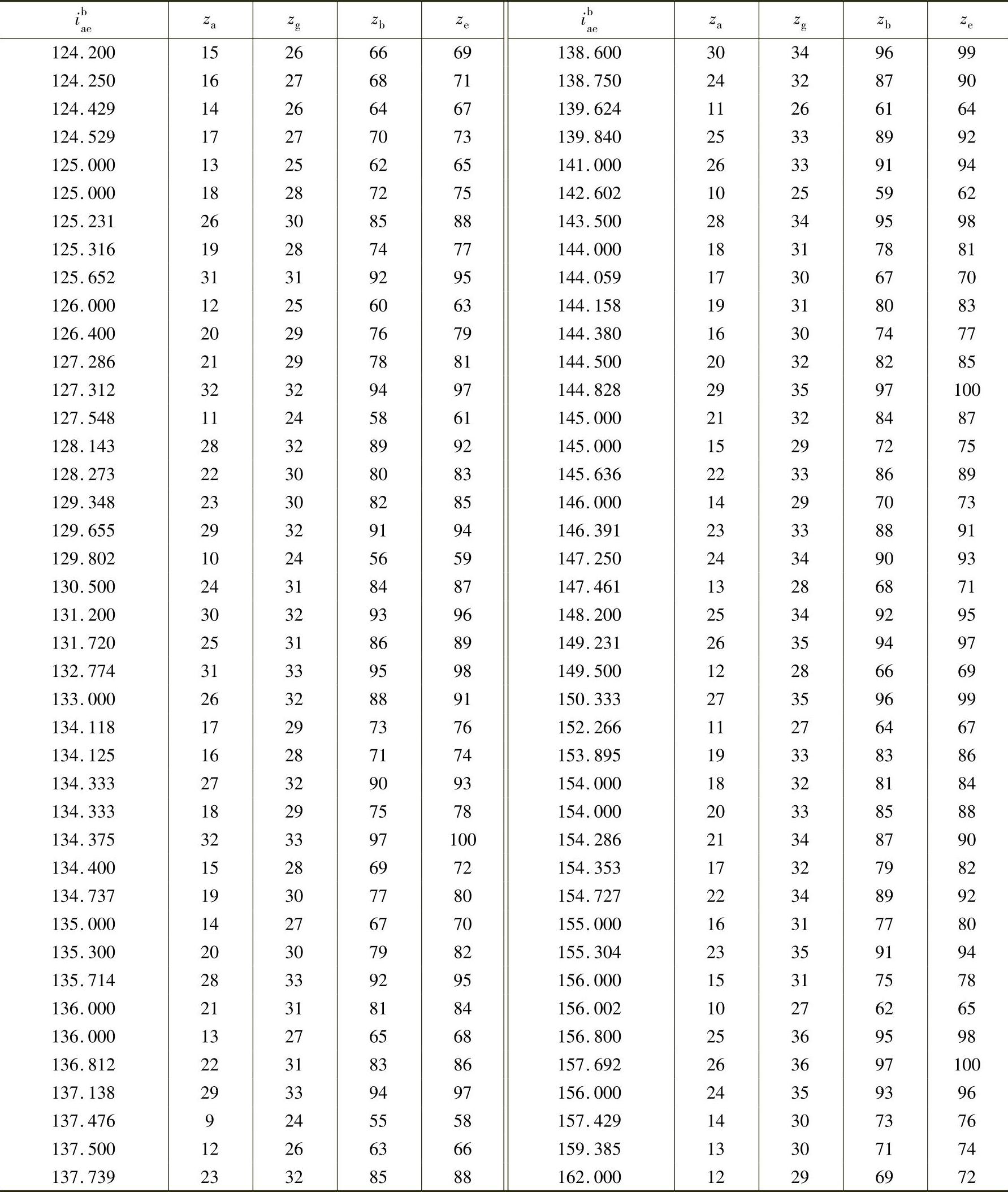
注:1.本表采用齿数zg≥za的数据。但列入数据由条件zg≥za进行限制,以提高由啮合强度和轴承的工作能力所限制的承载能力。
2.传动比按下式确定 值
值 为正,因此,中心轮a和e的转动方向相同。
为正,因此,中心轮a和e的转动方向相同。
3.需要得到传动比小于零的传动时,用固定中心轮e来实现。这时 或
或 。因此,从表中选择齿数时,是用近似于
。因此,从表中选择齿数时,是用近似于 而比
而比 大1的值来确定的。例如,已知
大1的值来确定的。例如,已知 ,则用表中的
,则用表中的 齿数来确定。
齿数来确定。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。