



【摘要】:常用的3K型行星齿轮传动有两种形式,如图8-1a、b所示。从图8-1a中可以看出,3K型行星齿轮传动相当于由两个2K-H型行星轮系串联而成。所以,3K型的总传动比为。解 1)计算转化机构传动比为所以代入数据,得2)计算转化机构传动比为所以代入数据,得3K型行星齿轮传动的特点和用途见表8-1。表8-1 3K型行星齿轮传动的特点和用途
常用的3K(NGWN)型行星齿轮传动有两种形式,如图8-1a、b所示。
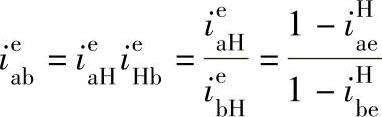
从图8-1a中可以看出,3K型行星齿轮传动相当于由两个2K-H型行星轮系串联而成。第一个2K-H(NGW)型为a、g、b和H的负号机构单级传动,其传动比为 ;第二个2K-H(NN)型为行星架H和轮b、g、f及e组成的正号机构双级传动,其传动比(行星架H主动)为
;第二个2K-H(NN)型为行星架H和轮b、g、f及e组成的正号机构双级传动,其传动比(行星架H主动)为 。所以,3K型的总传动比为
。所以,3K型的总传动比为 。同理,图8-1b也相当于由一个2K-H(NGW)型和一个2K-H(NN)型组成的串联结构。
。同理,图8-1b也相当于由一个2K-H(NGW)型和一个2K-H(NN)型组成的串联结构。
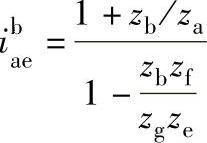
图8-1a的3K型行星齿轮传动的传动比为
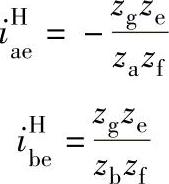
 (应用“更换下标,互为倒数”)
(应用“更换下标,互为倒数”)
 (应用普遍方程式)
(应用普遍方程式)
转化机构传动比

所以
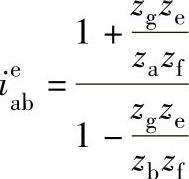
同理,图8-1b所示3K型行星齿轮传动的传动比为
若zf=zg,则式(8-1a)变为

而式(8-1b)变为

从上述分析可以看出,3K型行星传动是由一个2K-H型负号机构和一个2K-H型正号机构串联组成的。由于它包括2K-H型正号机构,即包含有传动比 ,当选择
,当选择 值接近于1时,
值接近于1时, 可以达到很大值,因而3K型的传动比可达到很大值。由于3K型包括有2K-H型正号机构和负号机构,因而其传动比可能为正值,主、从动构件转向相同;传动比也可能为负值,主、从动构件转向相反。
可以达到很大值,因而3K型的传动比可达到很大值。由于3K型包括有2K-H型正号机构和负号机构,因而其传动比可能为正值,主、从动构件转向相同;传动比也可能为负值,主、从动构件转向相反。
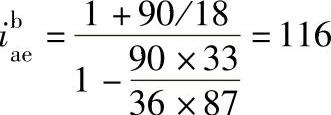
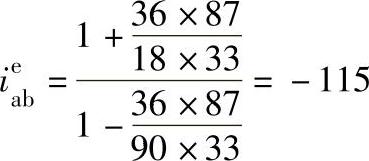
例8-1 图8-1a所示的3K型行星齿轮,已知za=18,zg=36,zb=90,zf=33,ze=87,试确定轮b固定时的传动比 和轮e固定时的传动比
和轮e固定时的传动比 。
。
解 1)计算(https://www.xing528.com)
转化机构传动比为
所以
代入数据,得
2)计算
转化机构传动比为
所以
代入数据,得
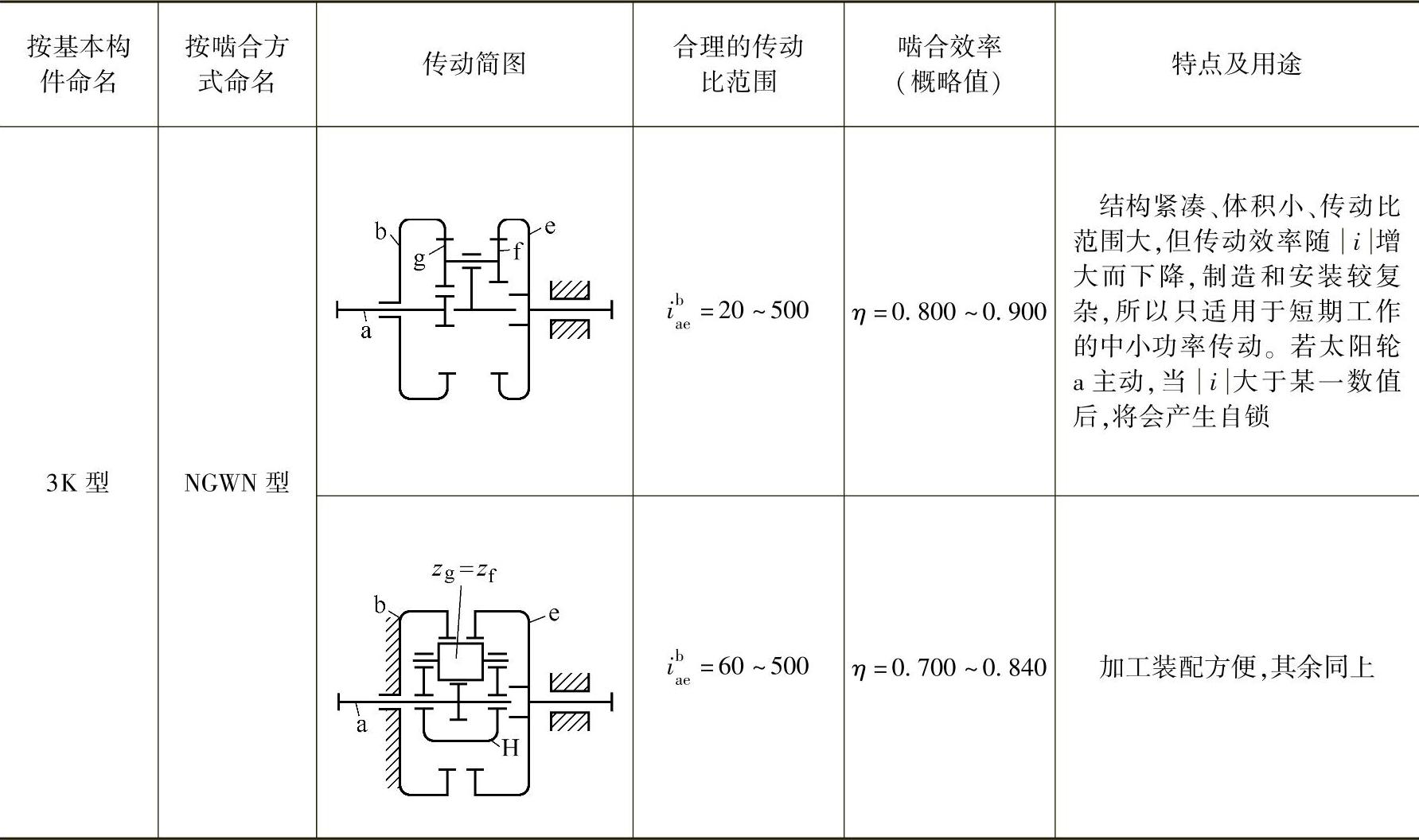
3K型行星齿轮传动的特点和用途见表8-1。
表8-1 3K型行星齿轮传动的特点和用途
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。