



(1)基本构件“浮动”的均载机构 基本构件“浮动”的均载机构是使太阳轮、内齿轮或行星架等基本构件在受力不平衡的条件下,能径向游动(浮动)。图6-21所示工作原理:当行星轮数np=3时,经过一个或两个基本构件浮动,可使作用在三个基本构件上的啮合力Fna、Fnb和2F各自形成力的封闭等边三角形。太阳轮a和内齿轮b的偏心量彼此相等,即ea=eb,其偏心方向的夹角等于 (图6-21中未计弹性变形、惯性力和摩擦力的影响)。
(图6-21中未计弹性变形、惯性力和摩擦力的影响)。
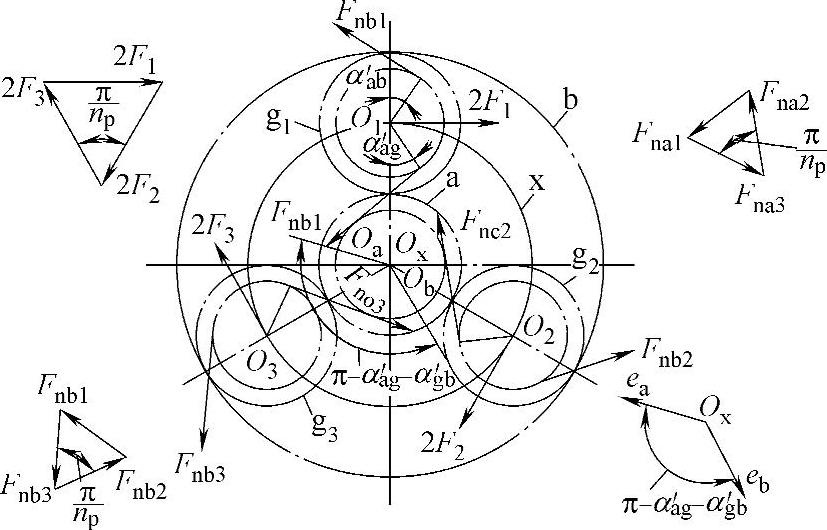
图6-21 当np=3时具有浮动件的NGW型传动理想受力状态
使基本构件浮动的最常用方法是采用双齿联轴器。三个基本构件中有一个浮动,即可起到均载作用,两个基本构件同时浮动时,效果更好。
1)太阳轮浮动。太阳轮通过双齿联轴器与高速轴相连接(见图6-22)。因为太阳轮重量较小,浮动灵敏,机构简单,容易制造,故应用广泛。当np=3中低速时,均载效果显著。当np>3高速时,效果不好,噪声偏大。载荷不均匀系数Kp=1.1~1.15。
2)内齿圈浮动。内齿圈通过双齿联轴器与机体相连接。优点是结构的轴向尺寸较小,缺点是浮动件尺寸大、质量大、加工不方便,浮动灵敏性较差,均载效果不如太阳轮浮动好。
NGWN型行星传动,常采用内齿圈浮动(见图6-23)。
3)行星架浮动。行星架通过双齿联轴器与低速轴相连接。行星架浮动不要支承可简化结构,特别是简化多级行星传动,如图6-24所示。由于行星架质量较大,在速度较高和制造质量较差的情况下,离心力较大,影响浮动效果,所以在质量不大、速度不高的情况下,采用较合适。在齿轮制造精度为7级,其他零件不低于2级精度时,载荷不均匀系数Kp=1.2~1.3。
4)太阳轮和行星架同时浮动,此法比两者单独浮动效果要好,如图6-25所示。
5)太阳轮和内齿圈同时浮动。此法主要用于高速行星传动。优点:噪声小,浮动效果好,工作可靠。如图6-26所示,内齿圈通过两个齿套与箱体连接,太阳轮不装轴承,用长齿套连接动力源或工作机械。为了增加浮动效果,内齿圈应尽量减薄,以增加柔性。载荷不均匀系数Kp=1.1~1.15。
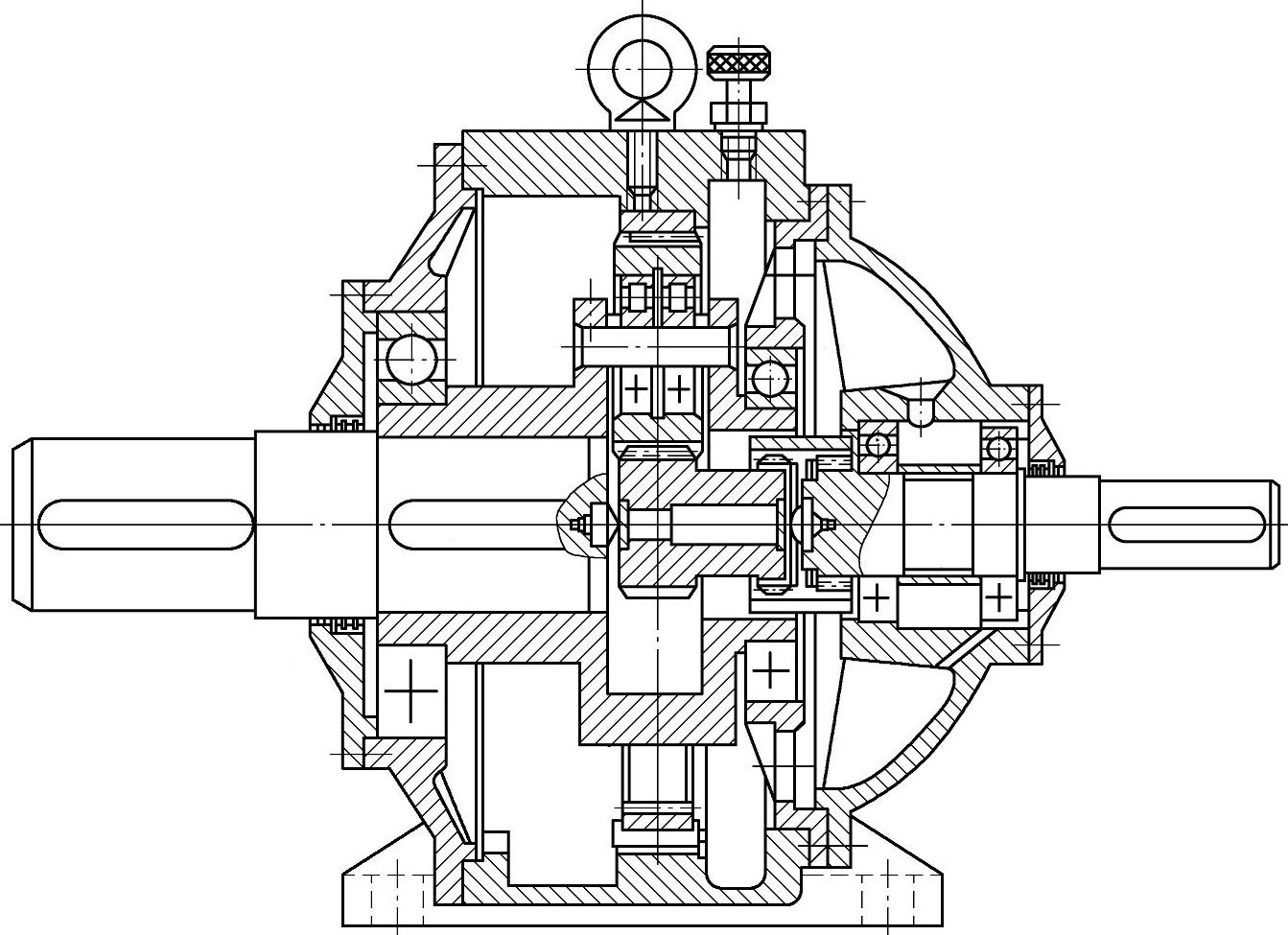
图6-22 单级2K-H(NGW)型太阳轮浮动
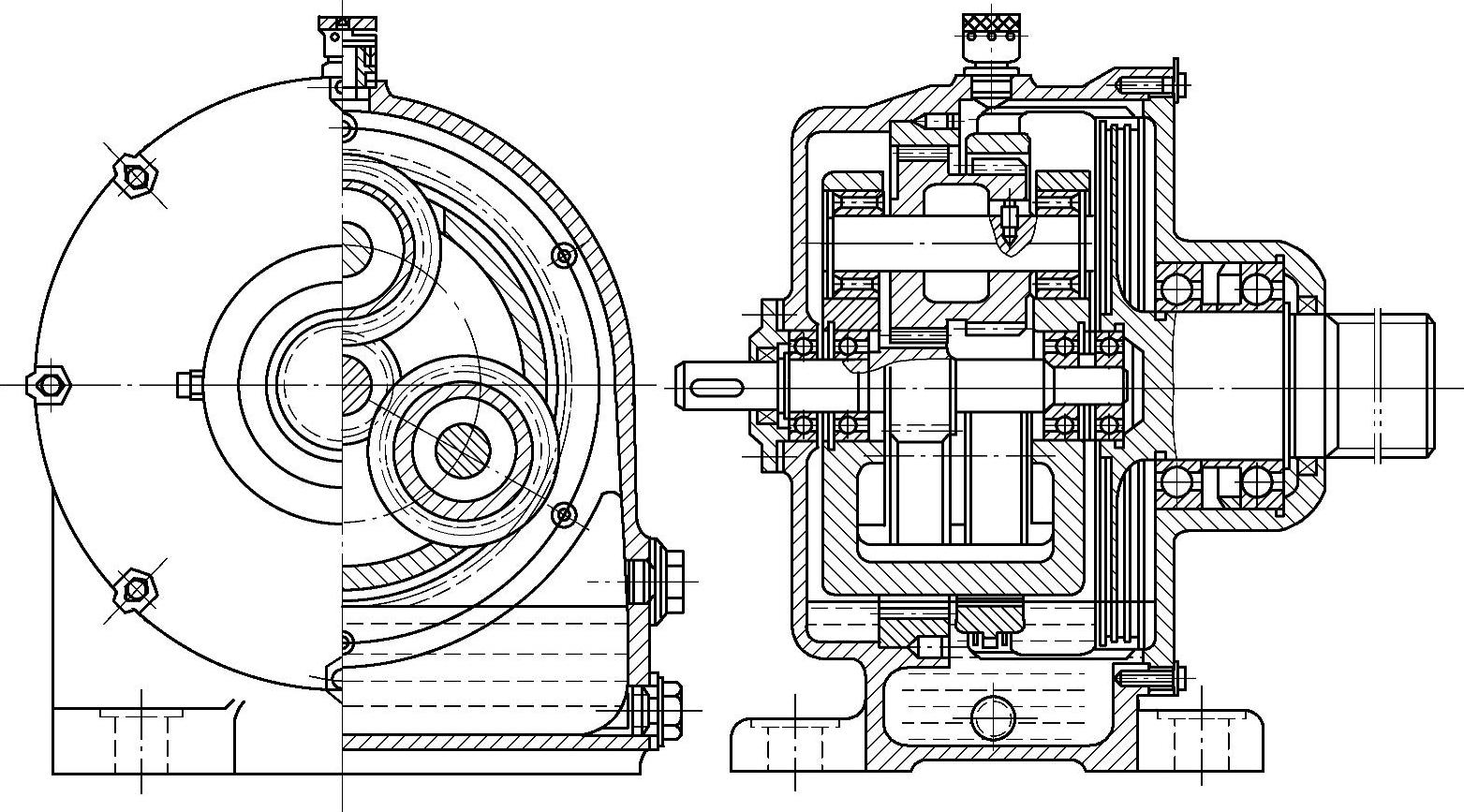
图6-23 3K(NGWN)型内齿轮浮动
6)无多余约束的浮动方法。图6-27所示是这种浮动机构的原理图。图6-28所示是这种浮动机构在双级行星传动中的应用。此法在行星轮中装置一个球面调心轴承。单级传动中,太阳轮利用单齿联轴器进行浮动。双级传动中,高速级行星架无支承并与低速级太阳轮固定连接。此法优点是机构中无多余约束,结构简单,浮动效果好,沿齿长方向的载荷分布均匀。由于行星轮内只装一个轴承,当传动比较小时,轴承尺寸小,寿命较短。
(2)采用弹性件的均载机构 这种机构主要通过弹性元件的弹性变形使各行星轮载荷均匀,常见形式有如下几种:
1)靠齿轮本身弹性变形的均载机构。如图6-29所示,采用薄壁内齿轮,靠内齿轮的弹性变形达到均载目的。图6-26所示中,合理设计内齿轮结构,也具有弹性均载作用。图6-30所示是另一种高速行星传动的结构,同时采用了薄壁内齿轮。带有细长轴的太阳轮和中空轴支承的行星结构,尽量增加各基本元件的弹性。优点:零件数量少,外廓尺寸小,减振性好,行星轮数可大于3。缺点:制造精度要求高,悬臂长度、壁厚和柔性要设计合理,否则影响均载效果,产生沿齿长的载荷集中。

图6-24 双级2K-H(NGW)型减速器(高速行星架浮动,低速太阳轮浮动)
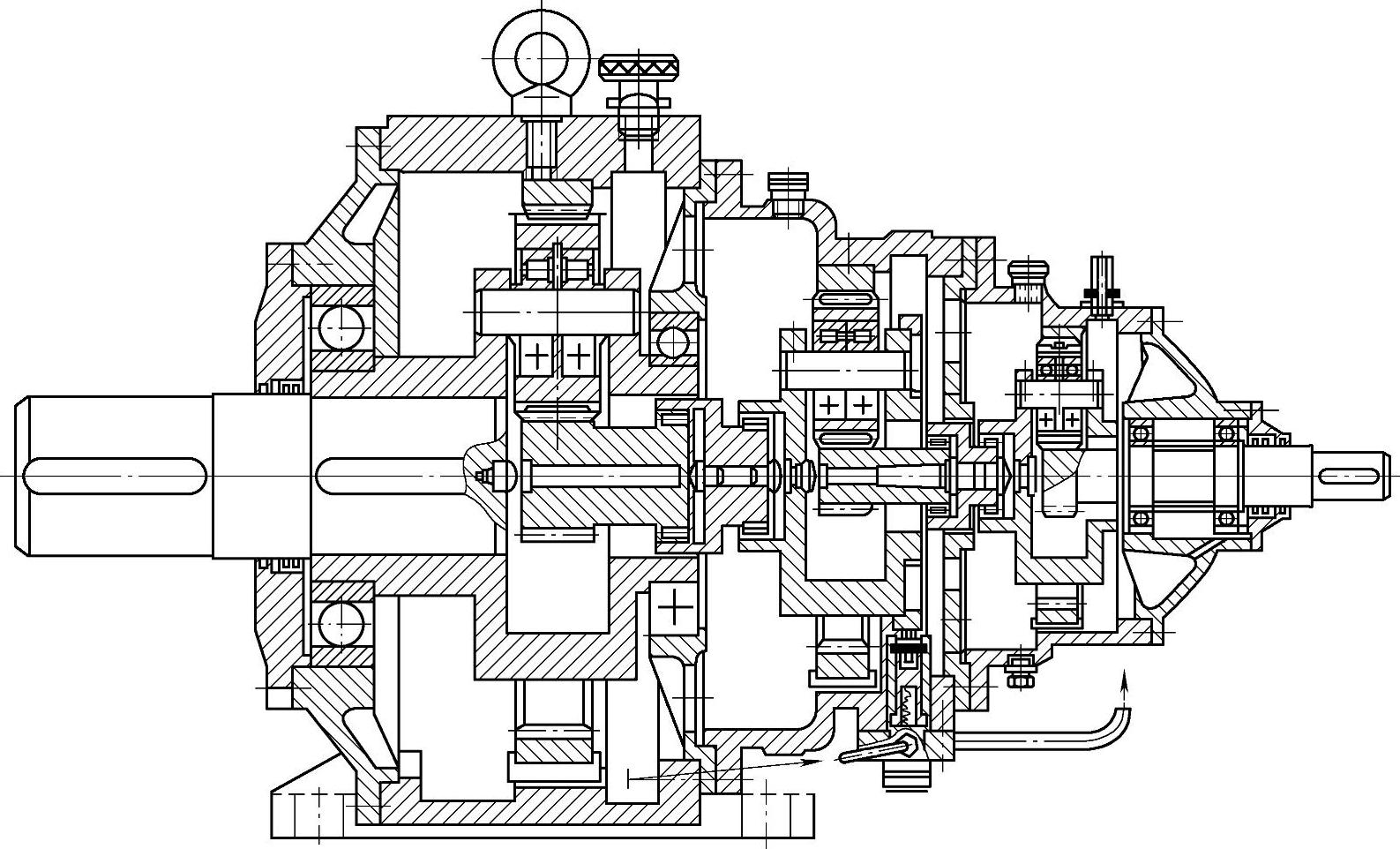
图6-25 三级2K-H(NGW)型减速器(中间级太阳轮和行星架同时浮动)
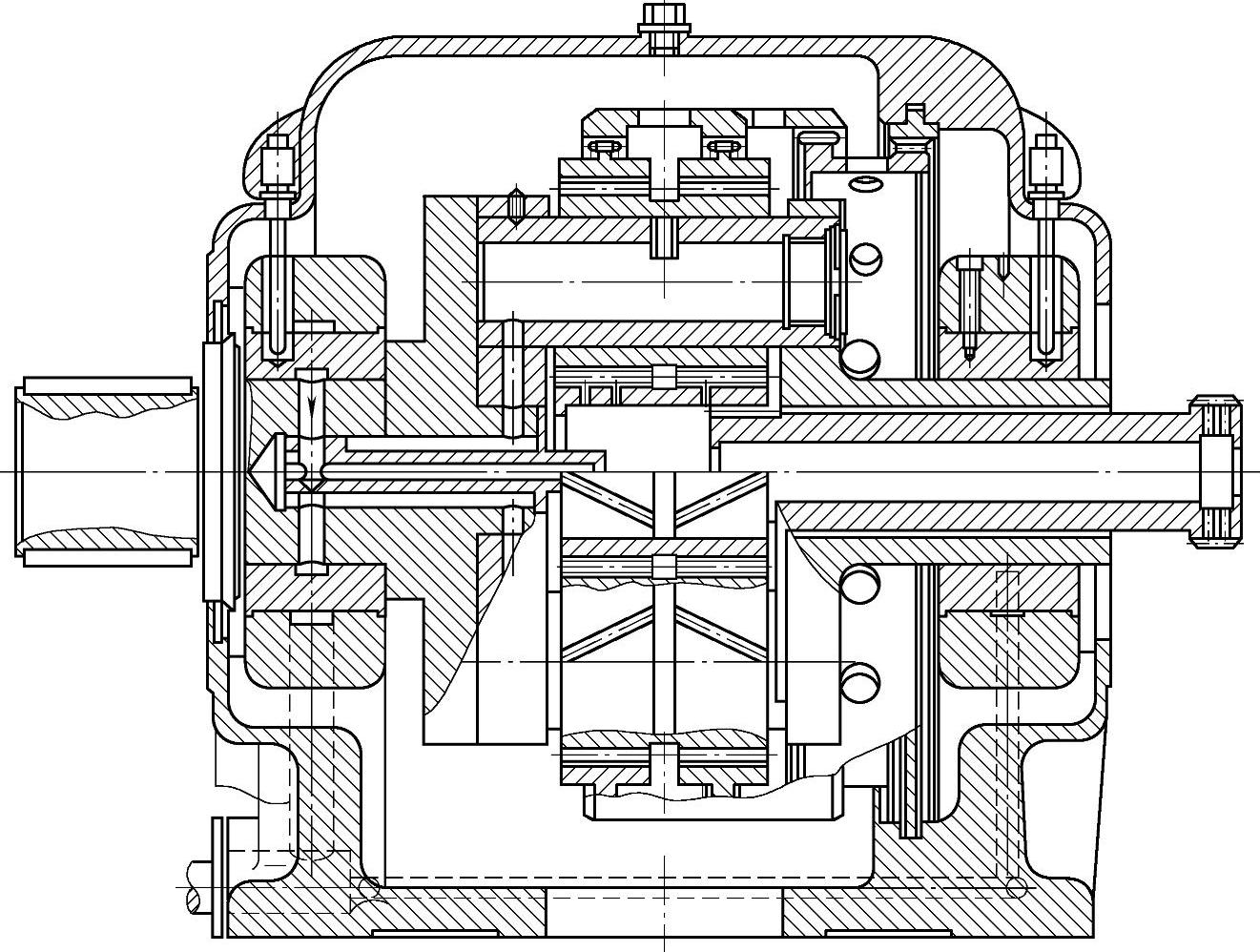
图6-26 2K-H型太阳轮和内齿轮浮动的高速行星传动(np=4)
2)采用弹性销的方法。如图6-31所示,内齿轮通过弹性销与机体固定,弹性销由多层弹簧圈组成。如图6-32所示(图中机体未示出,太阳轮靠双齿联轴器浮动),弹性销在长度方向分成五段装在一起,这种结构径向尺寸小,有较好的缓冲减振性能。
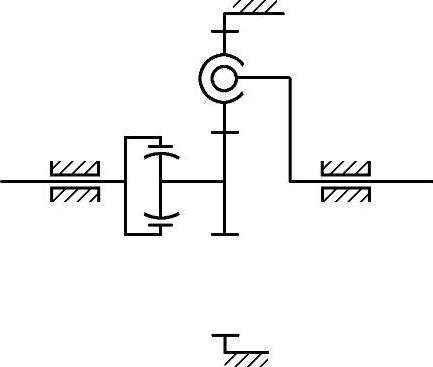
图6-27 无多余约束的浮动机构
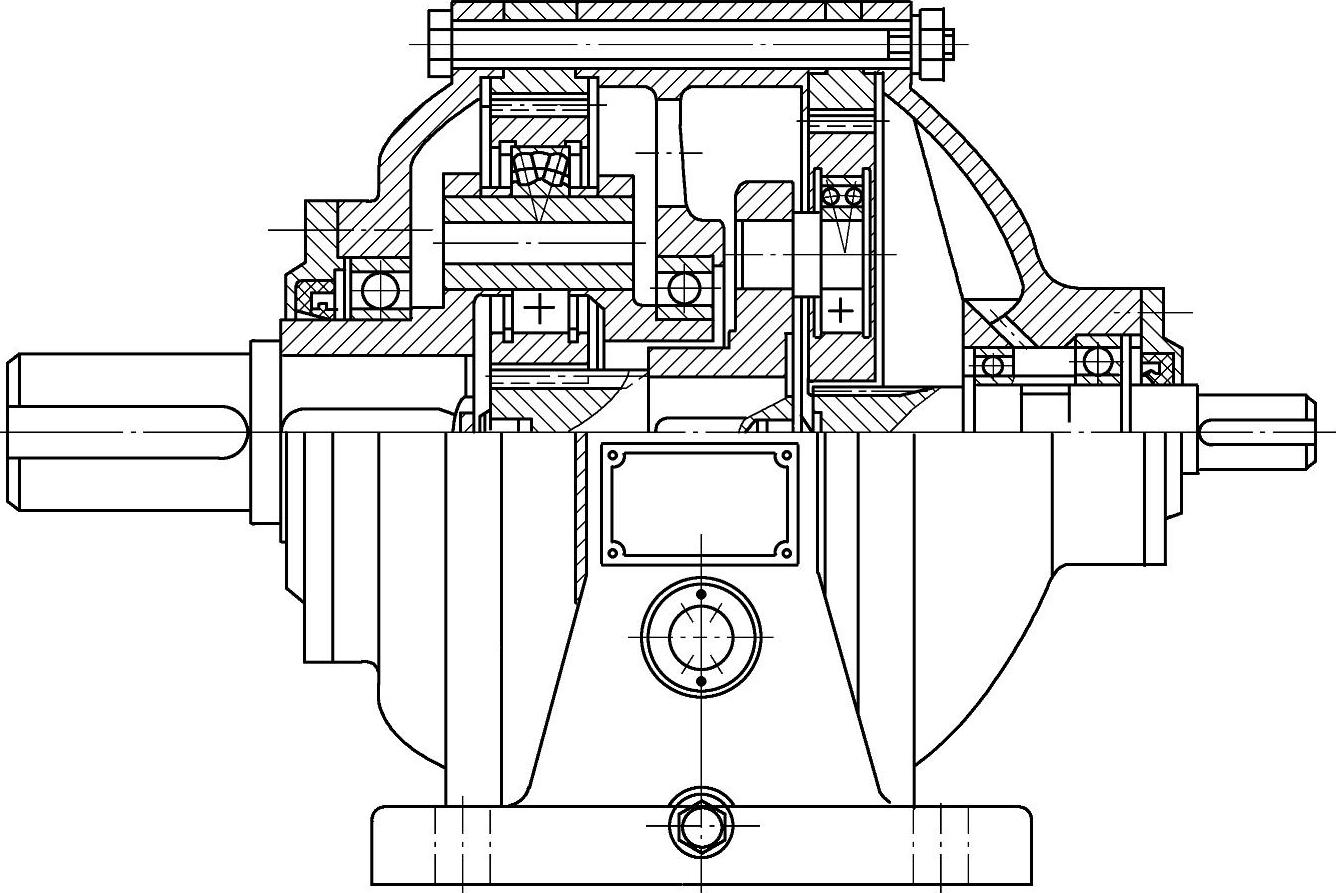
图6-28 无多余约束的双级减速器
3)用弹性件支承行星轮。在行星轮孔与行星轮轴之间或行星轴与行星架之间(见图6-33)安装非金属(如尼龙类)的弹性衬套。此法结构较简单,缓冲性能好,行星轮数可大于3。但非金属弹性套有老化和热膨胀等缺点,工作温度不能过高,不能用于啮合角αa′g>αg′b的角变位传动。
弹性件均载机构缺点:这类机构都依靠各弹性件弹性变形补偿误差,各件变形程度不同,影响载荷分布,弹性件刚度越大,制造误差越大,则载荷不均匀系数越大。
(3)杠杆联动均载机构 杠杆联动均载机构中装有带偏心的行星轮轴和连杆。
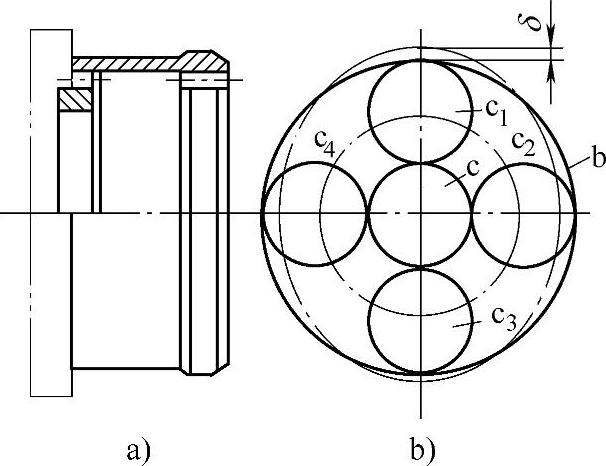
图6-29 薄壁内齿轮
a)安装形式 b)变形形式
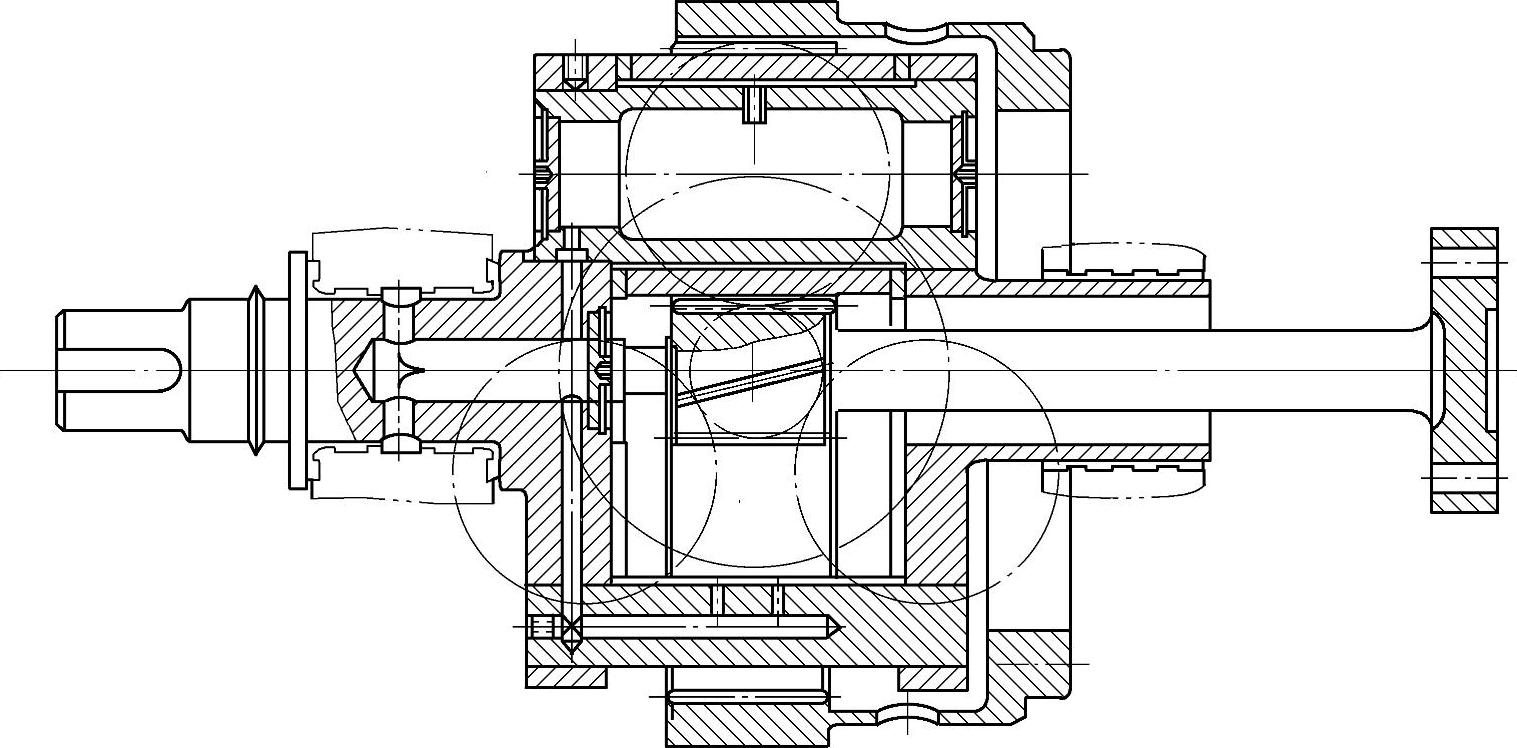
图6-30 靠柔性均载的高速行星机构(斜齿轮)(https://www.xing528.com)
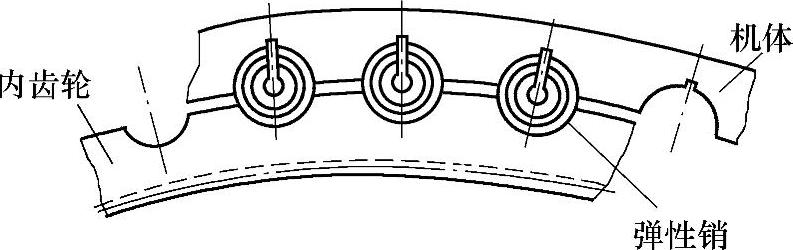
图6-31 弹性销结构
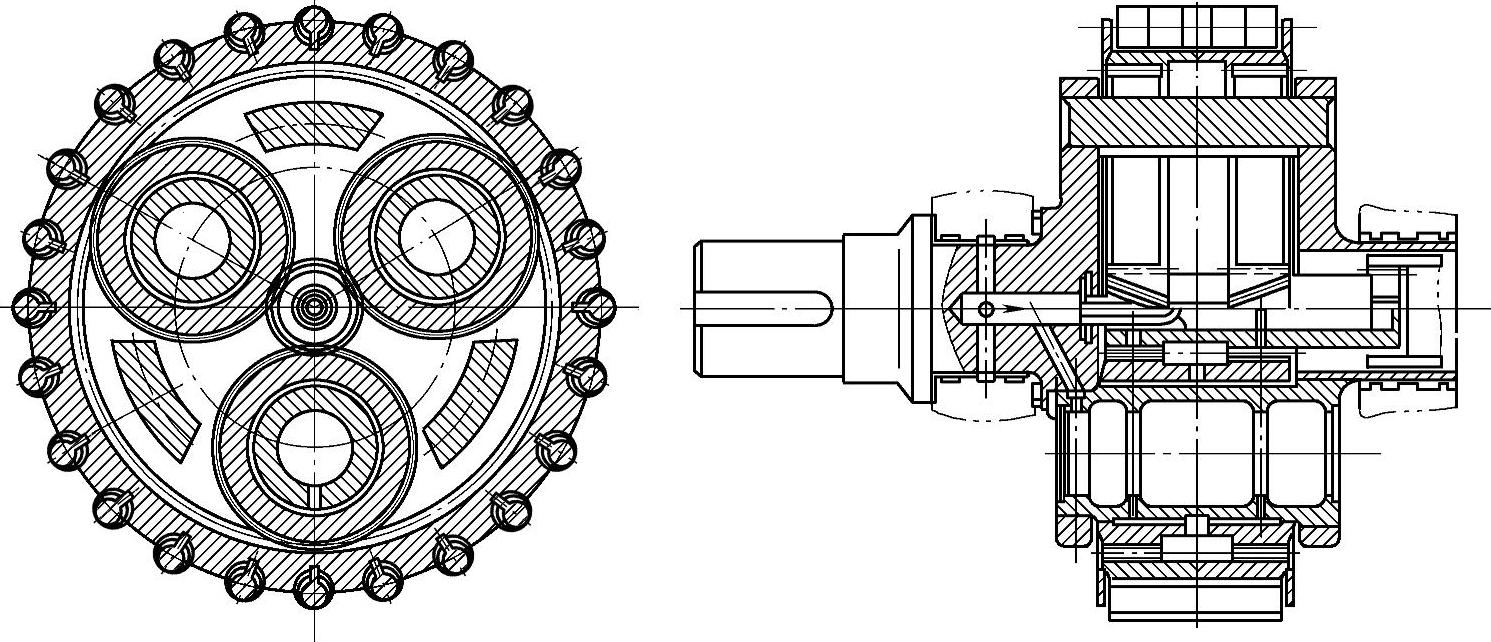
图6-32 内齿轮用弹性销固定的高速行星传动
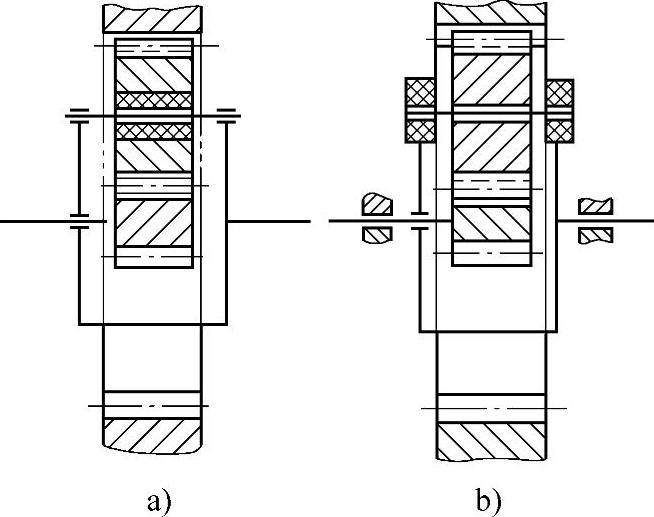
图6-33 行星轮弹性支承
a)行星轮轴孔中安装弹性衬套 b)行星架轴孔中安装弹性衬套
1)两行星轮联动机构。如图6-34所示,行星轮对称安装,在两个行星轮偏心轴上分别固定一对互相啮合的扇形齿轮(相当于连杆),当一个偏心轴回转时,由于齿扇啮合的杠杆作用,另一个偏心轴作相等而方向相反的回转,两行星轮的载荷达到均衡。扇形齿轮上的圆周力
式中 e——偏心距,可取 ;
;
Ft——齿轮圆周力。
载荷不均匀系数Kp=1.05~1.1。
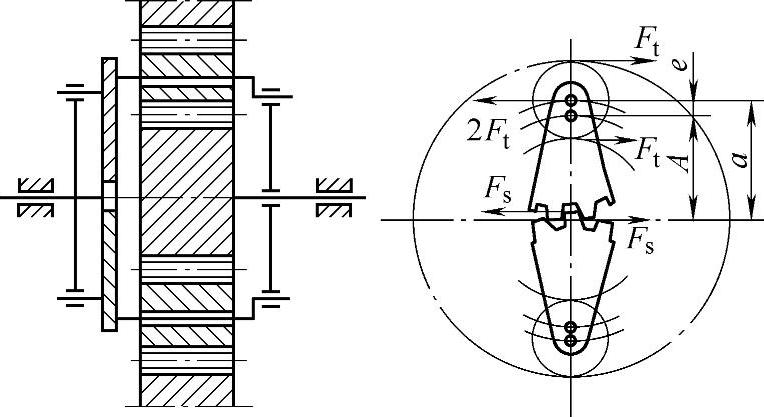
图6-34 两行星轮联动机构
2)三行星轮联动机构。图6-35所示为三行星轮的NGW型结构,平衡杆的一端与行星轮偏心轴固接,另一端与浮动环活动连接,六个啮合点所受的力大小相等时,机构才能过到平衡。当载荷不均衡时,作用在浮动环上的三个径向力Fs不等,浮动环产生移动或转动,直至三力平衡为止。
图中浮动环中心圆半径r=0.5A,A=a-e,平衡杠杆长度ρ=Acos30°,一般取 ,作用于浮动环的力Fs按下式计算
,作用于浮动环的力Fs按下式计算
载荷不均匀系数Kp=1.1~1.15。
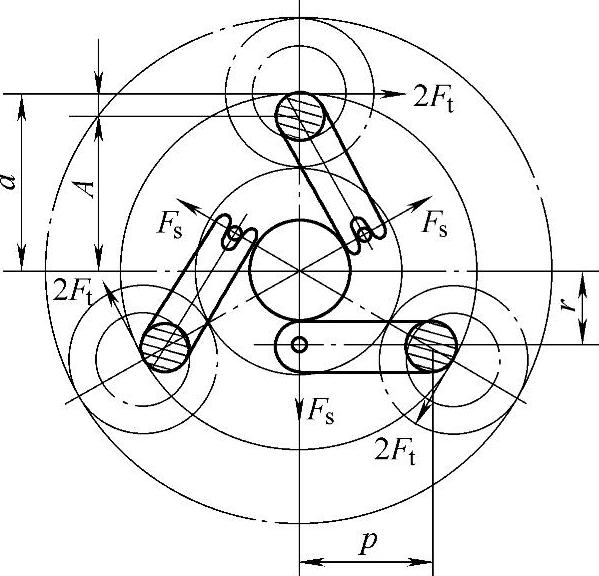
图6-35 三行星轮联动机构
3)四行星轮联动机构。图6-36a、b所示为四行星轮联动机构。
图6-36中根据平衡条件,构件尺寸应满足r1∶s1=r2∶s2的关系。取r1≈r2=14e,e=a/20~a/30,载荷不均匀系数Kp=1.1~1.15。
杠杆联动均载机构的均载效果较好,但结构较复杂。为了提高灵敏度,偏心轴用滚针轴承支承,使整个传动的轴承数量增多,小传动比时,行星轮轴承寿命较短,这种均载机构适用于中、低速传动。
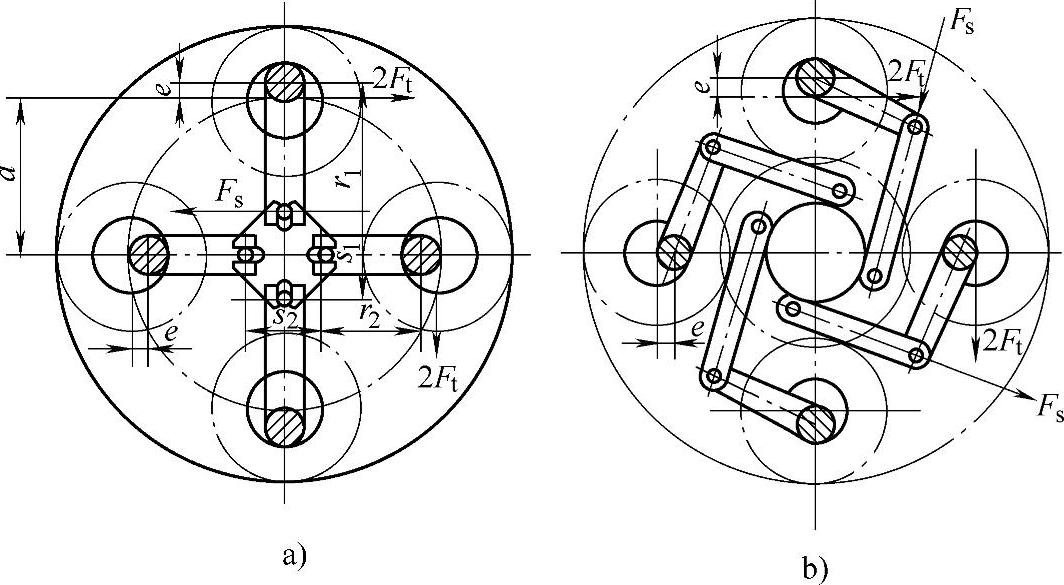
图6-36 四行星轮联动机构
双齿联轴器的内齿套长度(见图6-37):

式中 Emax——浮动件的最大浮动量;
ω——联轴器内齿套允许最大歪斜角度,一般为30′,对鼓形齿联轴器可取1°左右。
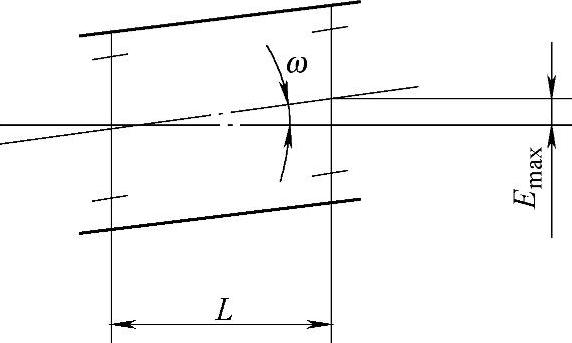
图6-37 内齿套长度的确定
(4)浮动用齿轮联轴器
1)主要参数推荐。齿形为渐开线直齿;压力角为α=20°;齿顶高系数ha∗=0.8;齿宽b≤1/3d;齿数:为了避免内齿轮产生径向切入顶切,应根据插齿刀的参数,选择变位系数和最小齿数。
2)强度验算。主要验算轮齿的挤压应力。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。