



1)设计时均载机构的选择有以下几点原则:
①采用的均载机构应使传动装置的结构尽量实现空间静定状态,并能最大限度地补偿误差,使行星轮间的载荷分配不均衡系数Kp和沿齿宽方向的载荷分布系数Kβ值最小。
②均载机构的离心力要小,以提高均载效果和传动装置的平衡性。
③均载机构的摩擦损失要小,效率要高。
④均载构件上受的力要大,受力大则补偿动作灵敏、效果好。如果以μ表示均载构件上所受的力Fω与齿轮圆周力Ft之比值,即
则μ值越大越好。
当太阳轮为均载构件时,对直齿和人字齿轮传动有
Fω=Fttanα
则μ=tanα
对非变位和高度变位啮合,α=20°,μ=0.36。对角度变位啮合,α=α′=24°~26°,μ=0.45~0.49。
当行星轮为均载构件时,有
Fω=2Ft
即μ=2,这是采用行星轮或行星架为均载构件的有利因素。
⑤均载构件在均载过程中的位移量要小。即均载机构补偿的等效误差数值要小。由分析可知,行星轮和行星架的等效误差比太阳轮和内齿轮小。
⑥应有一定的缓冲和减振性能。
⑦要有利于传动装置整体结构的布置,使结构简化,便于制造、安装和使用维修。在多级传动设计中,这一问题的考虑尤为重要。
⑧要有利于标准化、系列化产品组织成批生产。系列设计中均载机构形式不应过多,以1~2种为宜。
设计中应视具体条件选用最适宜的均载机构。必须指出,不能轻易增加均载环节,以免造成结构复杂化和不合理现象。均载机构可以补偿制造误差,但不能代替必要的制造精度,过低的精度会降低均载效果,导致噪声、振动及齿面磨损加剧,甚至造成损坏事故。(https://www.xing528.com)
2)均载机构位移量计算。位移量计算见表6-17,并应注意以下几点:
①等效中心误差。各构件的误差换算到浮动构件中心切线方向的值。
②总等效中心误差的影响因素很多,如构件的温度变形、弹性变形和轴承间隙等。在成批生产中,出现最大误差累积的几率很少,所以按平方和的方法计算均载件位移量更为合适。
表6-17 均载构件位移量的计算
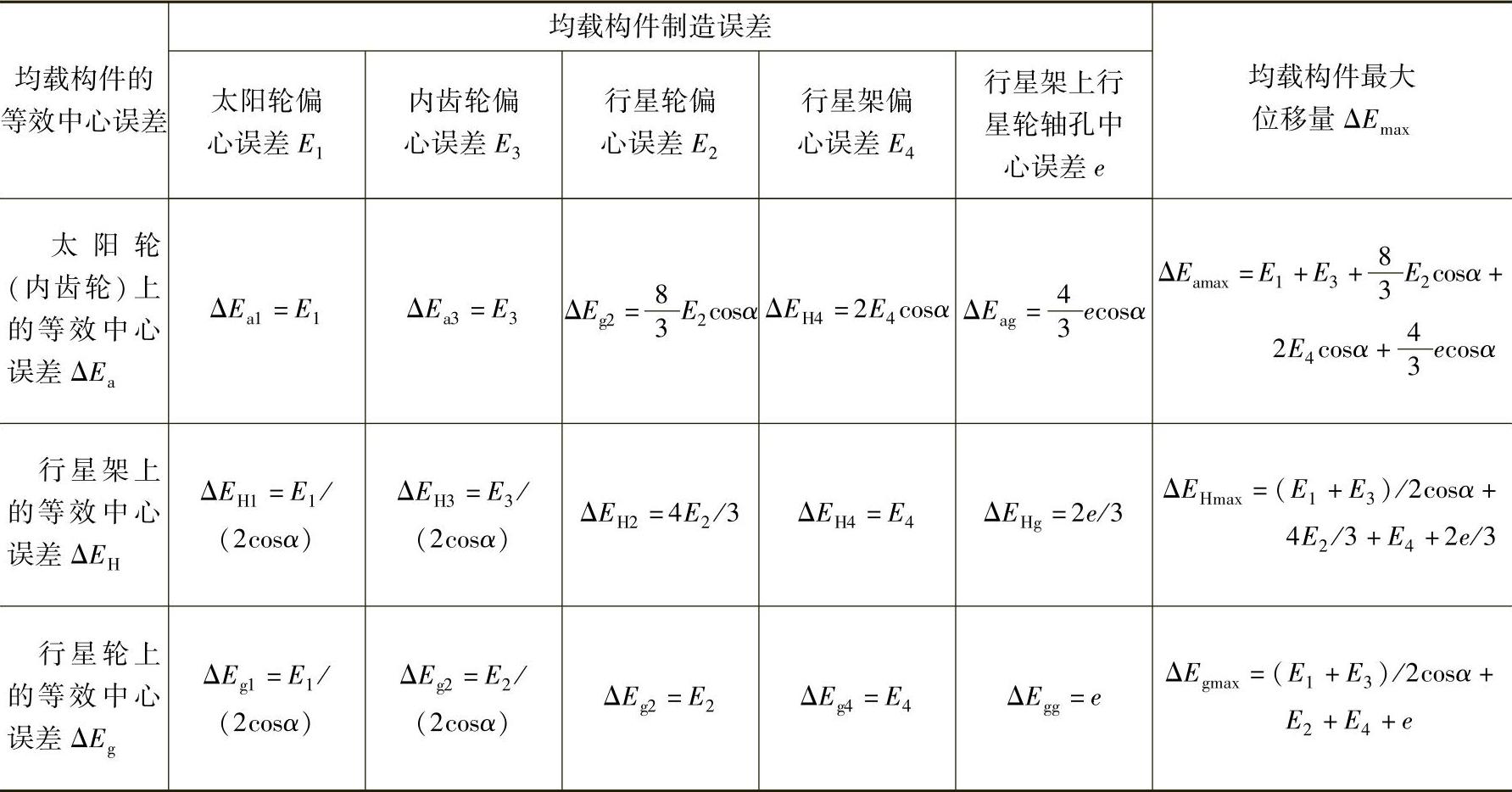
在最不利的情况下,均载构件的最大位移量为各等效中心误差的累积值。当太阳轮作为均载构件时,等效中心误差为

当行星架作为均载构件时,等效中心误差为

当行星轮作为均载构件时(杠杆联动法除外),等效中心误差为

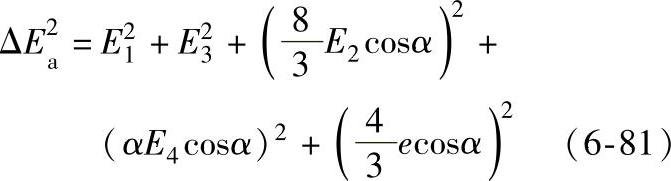
实际上影响总等效中心误差的因素很多,如各构件的热变形、弹性变形和轴承间隙等,而且在成批生产中,出现最大累积误差的概率很小,所以按平方和的方法计算均载构件的位移量更为合适,即当太阳轮(或内齿圈)为均载构件时
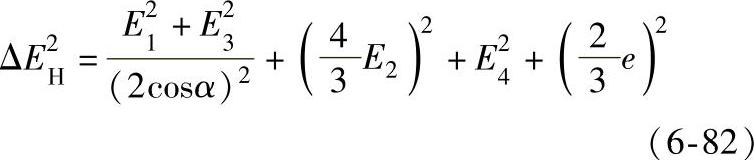
当行星架为均载构件时
当行星轮为均载构件时(杠杆联动法除外)

对于采用齿形联轴器使均载构件浮动的机构,总等效中心误差可用来计算联轴器的长度;对于采用弹性件使均载构件浮动机构,总等效中心误差可用来确定弹性件的结构及作用在弹性件上的变形力。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。