



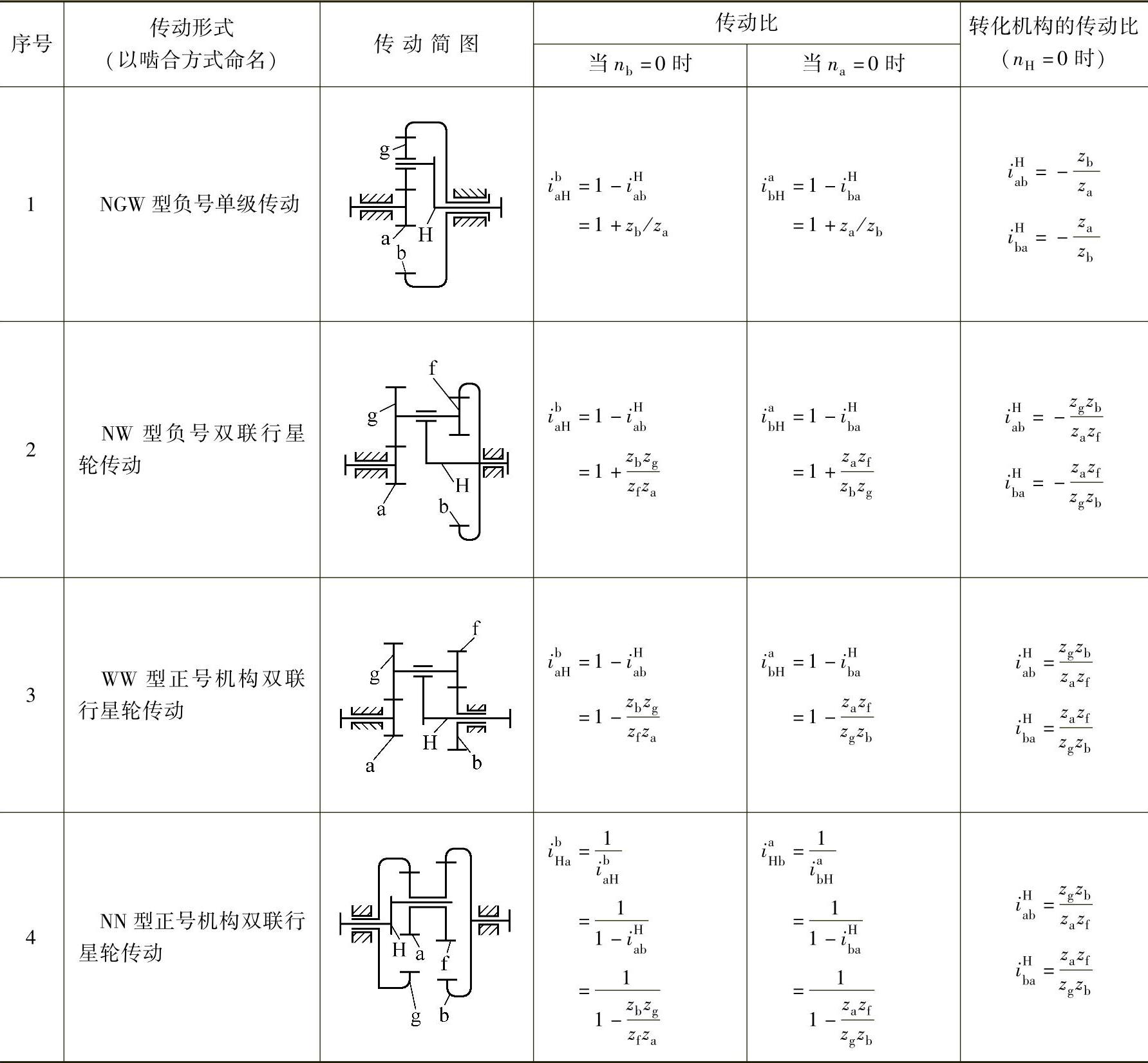
(1)负号机构2K-H型行星轮系的传动比计算 单排2K-H(NGW)型行星轮系(见表6-5中序号1)和双联行星轮内外啮合2K-H(NW)型行星轮系(见表6-5中序号2)均为负号机构,其转化机构传动比均为负值。
2K-H(NGW)型, ;2K-H(NW)型,
;2K-H(NW)型,
表6-5 用普遍关系式计算2K-H型行星轮系的传动比
当求 时,
时, (应用普遍方程式),将转化机构传动比代入,得
(应用普遍方程式),将转化机构传动比代入,得
2K-H(NGW)型

2K-H(NW)型

当求 时,同理可得
时,同理可得
2K-H(NGW)型

2K-H(NW)型

当求 时,所求的传动比i的第一个下标为行星架H,这时首先应该用“更换下标、互为倒数”,将第一个下标H换到第二个下标位置,然后再应用普遍方程式进一步列式。
时,所求的传动比i的第一个下标为行星架H,这时首先应该用“更换下标、互为倒数”,将第一个下标H换到第二个下标位置,然后再应用普遍方程式进一步列式。
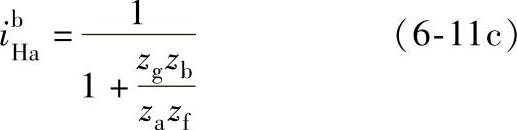
 (应用“更换下标、互为倒数”)=1/
(应用“更换下标、互为倒数”)=1/ (应用普遍方程式)。
(应用普遍方程式)。
代入转化机构传动比得
2K-H(NGW)型

2K-H(NW)型
当求 时,同理可得2K-H(NGW)型
时,同理可得2K-H(NGW)型

2K-H(NW)型

可见,不同的形式、不同的固定构件和主、从动构件,其传动比公式就不同。但是它们列式的方法都是一样的,就是应用普遍方程式和“更换下标、互为倒数”这两个既易记又简便的方法。
例6-1 在表6-5序号1中所示为单排2K-H(NGW)型行星轮系,已知za=24,zg=36,zb=96,试求 、
、 、
、 和
和 。
。
解 1)转化机构传动比

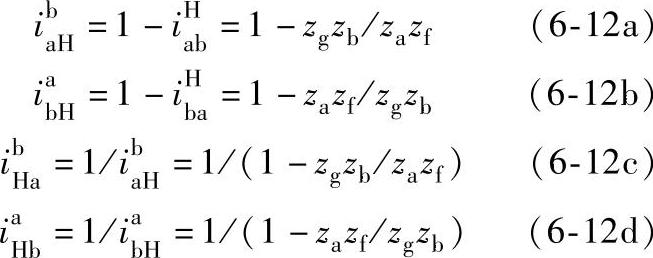
2)应用普遍方程式的方法列 和
和 公式
公式

代入数据,得

3)应用“更换下标、互为倒数”方法求 和
和
例6-2 在表6-5序号2中所示为双排内外啮合2K-H(NW)型行星轮系,已知za=14,zg=38,zf=18,zb=70,试求传动比 和
和 。
。
解 1)转化机构传动比

2)应用普遍方程式的方法列 公式
公式

代入数据,得(https://www.xing528.com)

3)先应用“更换下标、互为倒数”方法,再用普遍方程式的方法列

代入数据,得

从例6-1和例6-2的计算结果可以清楚地看到,负号机构2K-H型的一些传动特性:
由 、
、 和
和 、
、 ,可知这种形式行星轮系的主、从动轴转向相同。行星架从动时为减速机构,主动时则为增速机构。当作减速传动时,其传动比
,可知这种形式行星轮系的主、从动轴转向相同。行星架从动时为减速机构,主动时则为增速机构。当作减速传动时,其传动比 或
或 都比相应转化机构传动比大1。由于|zb/za|>1,所以
都比相应转化机构传动比大1。由于|zb/za|>1,所以 传动比较大,而且一定是大于2;由于|za/zb|<1,所以
传动比较大,而且一定是大于2;由于|za/zb|<1,所以 较小,一般在大于1至小于2之间。2K-H(NW)型转化机构为两级传动,其
较小,一般在大于1至小于2之间。2K-H(NW)型转化机构为两级传动,其 较2K-H(NGW)型大,故其传动比
较2K-H(NGW)型大,故其传动比 也较2K-H(NGW)型大一些。
也较2K-H(NGW)型大一些。
(2)正号机构2K-H型行星轮系的传动比计算 双外啮合2K-H(WW)型行星轮系(见表6-5中序号3所示)和双内啮合2K-H(NN)型行星轮系(见表6-5中序号4所示)的转化机构传动比 均为正值,属于正号机构2K-H型行星轮系。
均为正值,属于正号机构2K-H型行星轮系。
应用普遍方程式和“更换下标、互为倒数”的方法,不难列出这种形式的传动比公式
例6-3 在表6-5序号3中所示双外啮合2K-H(WW)型行星轮系,现有A、B两种规格,已知齿轮齿数分别为
规格A
za=41,zg=39,zf=41,zb=39
规格B
za=100,zg=101,zf=100,zb=99
试分别计算这两种规格的传动比 和
和 。
。
解 1)转化机构传动比公式

2)先应用“更换下标、互为倒数”和普遍方程式的方法,列出传动比 和
和

代入数据,得
规格A

规格B


代入数据,得
规格A

规格B

例6-4 在表6-5中序号4中所示为双内啮合2K-H(NN)型行星轮系,已知za=31,zg=28,zf=35,zb=38,试求 。
。
解 1)转化机构传动比公式

2)列出 公式
公式

代入数据,得

从例6-3和例6-4的计算结果也可以清楚地看到正号机构2K-H型行星轮系的传动特性:
正号机构2K-H型行星轮系,当行星架H主动时作为减速机构,从动时作为增速机构。通常用作减速机构,其传动比可为正值,亦可为负值。如例6-3中 =10.5,主、从动构件转向相同;
=10.5,主、从动构件转向相同; =-9.5,主、从动构件转向相反,传动比的绝对值变化范围很大。当转化机构传动比公式
=-9.5,主、从动构件转向相反,传动比的绝对值变化范围很大。当转化机构传动比公式 中,分子和分母的比值较接近于1,而且齿数都较大时,则行星轮系传动比的绝对值就越大。如例6-3规格B,其传动比
中,分子和分母的比值较接近于1,而且齿数都较大时,则行星轮系传动比的绝对值就越大。如例6-3规格B,其传动比 竟达到10000。
竟达到10000。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。