



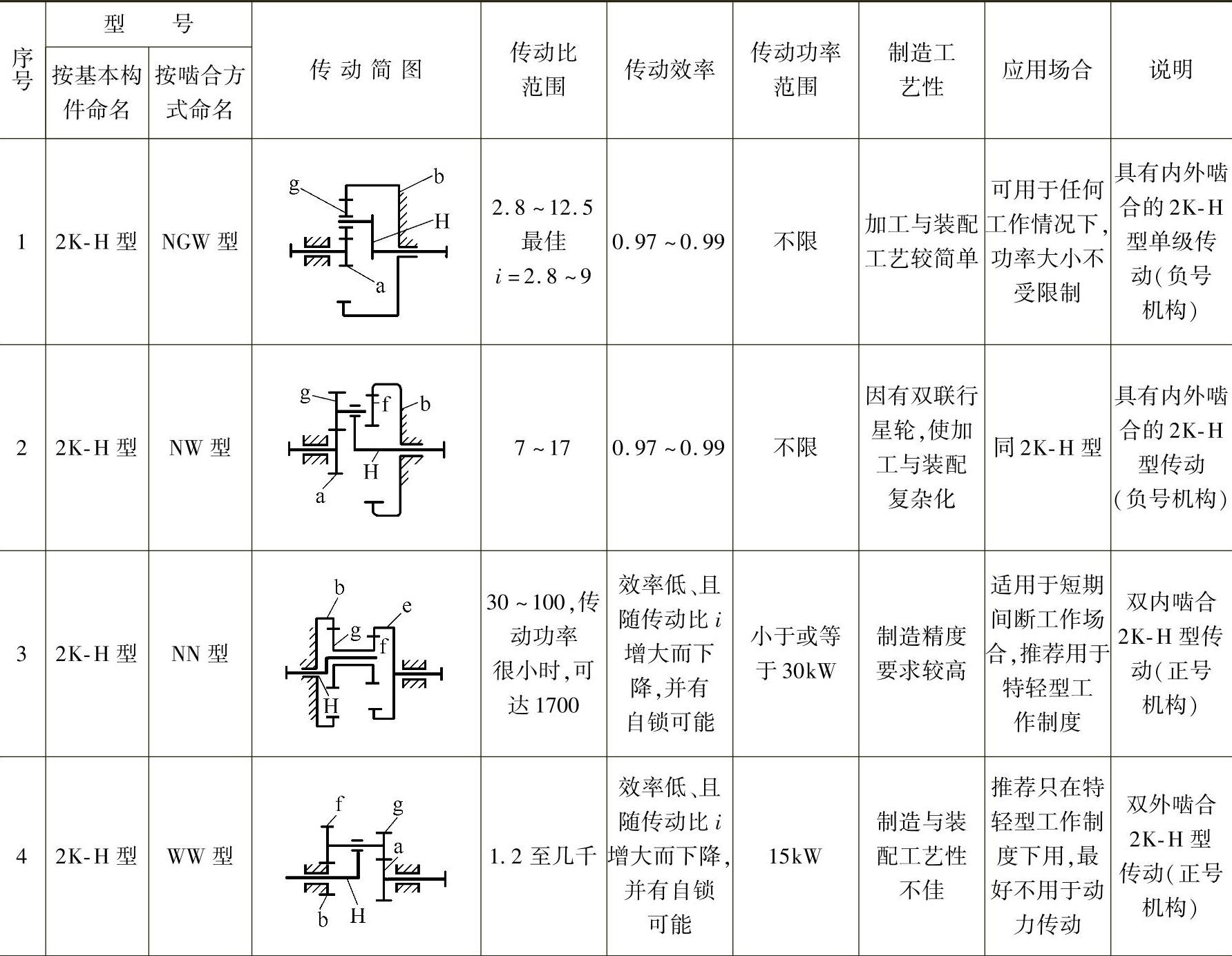
行星齿轮传动形式很多,表6-2中所列为常用的几种形式。根据基本构件的组成情况可分为以下三种基本类型:
1)2K-H型。基本构件为两个中心轮2K和一个行星架H。2K-H型的传动方案也很多,有单级传动、两级传动和多级传动之分;又有正号机构和负号机构之分(表6-2中序号1~4)。当行星架H固定时,主、从动轮转动方向相同的机构,称为正号机构;反之称为负号机构。
2)3K型。基本构件为三个中心轮,故称为3K型,其行星架不承受外转矩,仅起支承行星轮的作用。3K型的传动方案也很多,最有代表性的方案见表6-2中序号5。
3)K-H-V型。基本构件为一个中心轮K、一个行星架H及一个绕主轴线转动的构件V。表6-2中序号6的传动简图为K-H-V型各个构件运动关系的原理图。构件V和行星轮g的转速相同,由于两者轴线平行错开,故用醒目的万向节W连接(也称W机构)来示意。
从表6-2中可以看出,具有内、外啮合的2K-H型单级传动优点较多,主要是传动效率高,承载能力大、传递功率不受限制、结构简单、工艺性好。3K型的传动比2K-H型大,但随着传动比的增大,其传动效率下降;又因为是双联行星轮,在zg≠zf时,制造上要复杂一些。
表6-2 常用几种行星传动机构的基本性能
(续)
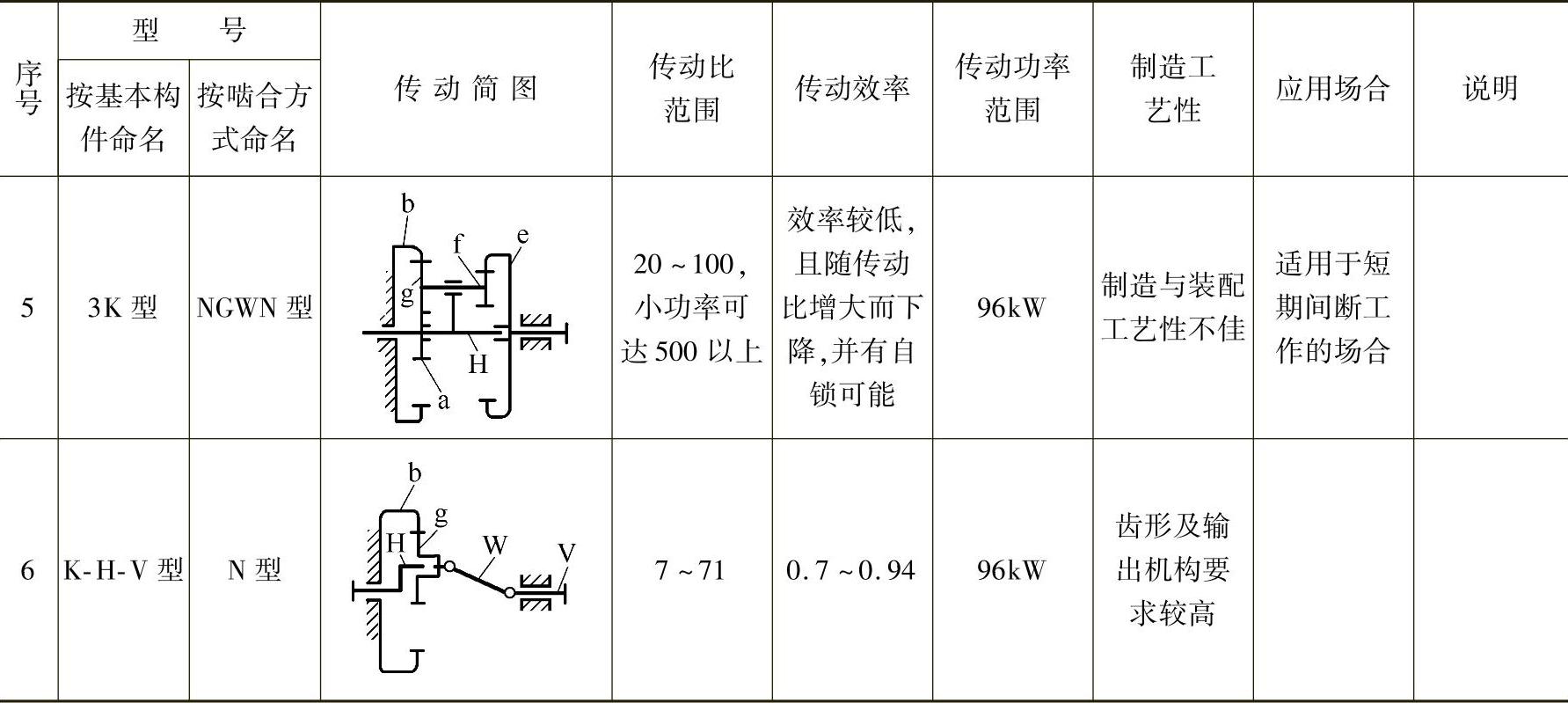
K-H-V型的传动结构紧凑,传动比大。目前推广应用的渐开线少齿差行星齿轮传动和摆线针轮传动就属于这一种,但其输出机构方面制造精度要求较高。(https://www.xing528.com)
3.行星齿轮传动的特点和优越性
1)行星齿轮传动的特点:①把定轴线传动改为动轴线传动;②功率分流,采用数个行星轮传递载荷;③合理地应用内啮合。
2)行星齿轮传动的优越性:①体积小、质量轻,只相当于一般齿轮传动的体积、质量的1/2~1/3;②承载能力大,传递功率范围及传动比范围大;③运行噪声小、效率高、寿命长;④由于尺寸和质量减少,能够采用优质材料与实现硬齿面等化学处理,机床工具规格小,精度和技术要求容易达到;⑤采用合理的结构,可以简化制造工艺,从而使中小型制造厂能够制造,并易于推广普及;⑥采用差动行星机构,用两个电动机可以达到变速要求。
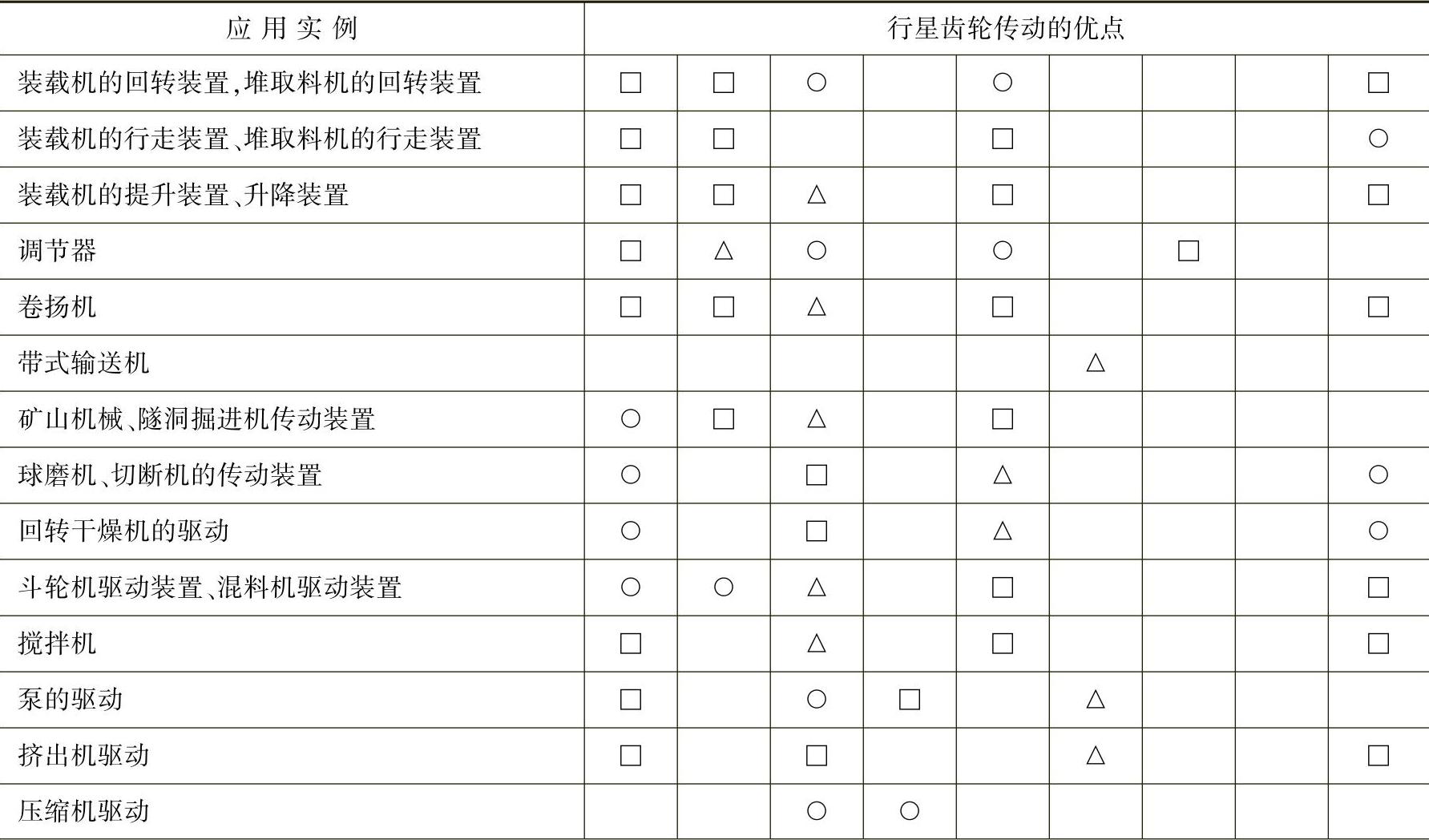
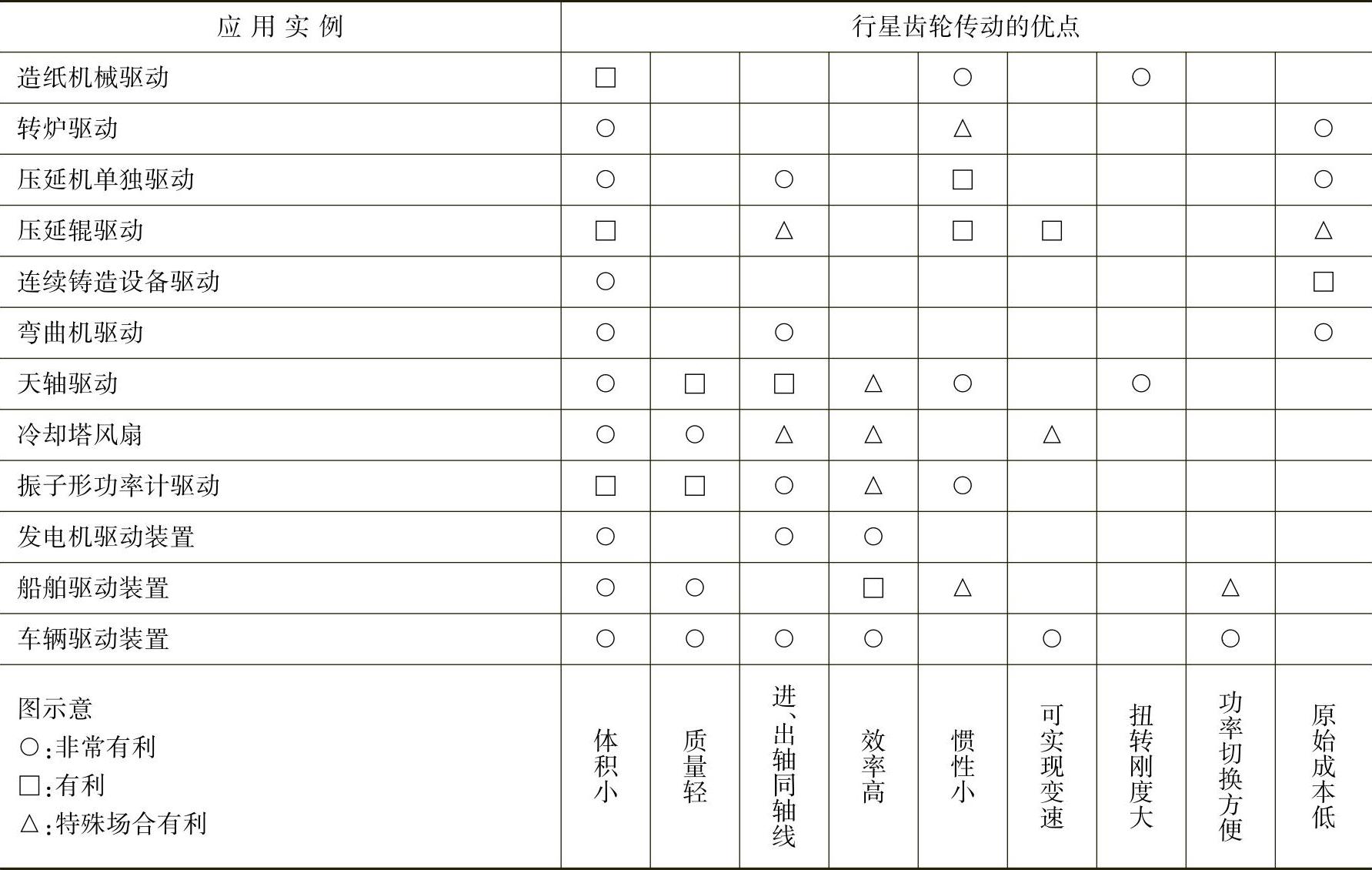
由此可见,行星齿轮传动是一种先进的齿轮传动结构,应大力推广应用,并在实践中进一步发展与提高。根据各行业的不同要求与特点,行星齿轮传动的优点及其应用实例见表6-3。
表6-3 行星齿轮传动的优点及其应用实例
(续)
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。