



对于锤击法而言,通常的做法是响应传感器固定不动,移动力锤,但也不乏采用移动响应传感器,固定力锤敲击的方式。
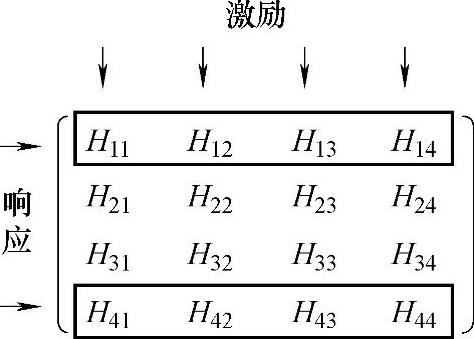
对于固定响应传感器,移动力锤而言,由于传感器固定不动,因此没有移动质量载荷的影响,也就是说系统是一个时不变系统,满足时不变性假设。相比于移动传感器,移动力锤更容易实现,因为不需要固定安装,锤击完一个测点即移走,不影响结构的动态特性。由于传感器固定不定,可以固定多个响应传感器,因此,可以获得频响函数矩阵的多行,属于MRIT方式,如图4-73所示,获得多参考点数据组,可最大限度提取到所有感兴趣的模态。
移动力锤,固定响应传感器虽然有以上好处,但也有一些不利的方面。由于挥动力锤敲击的空间远大于响应传感器安装所需要的空间,因此,有些测点因空间限制可能无法进行锤击。移动力锤时,很多测点很难能敲击到三个方向,对于面内的测点只能敲击面的法向,对于棱上的测点,可以锤击两个方向,而只有角点位置才能锤击三个方向,这样可能导致得不到频响函数矩阵完整的多行。
 (https://www.xing528.com)
(https://www.xing528.com)
图4-73 移动力锤,固定响应传感器
对于固定测点锤击,移动响应传感器而言,由于每个测点可以使用三向传感器进行测量,因此每个测点都有三个方向的信息。但是由于力锤在一个固定测点处进行锤击,因此这种方式属于SRIT方式。力锤锤击测点为参考点,可以获得频响函数矩阵的一列,如图4-74所示。锤击的位置可能不是最合适的,这将导致参考点选择不合适,从而存在丢失模态的风险。另一方面,传感器在待测结构上移动,将存在移动质量载荷的影响,如果待测结构是个轻质结构,这些影响将尤为严重。
一般对于小型结构更多采用移动力锤,固定响应传感器的方式。对于大型结构,更多采用固定测点锤击,移动传感器的方式。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。