



对于EMA而言,可以采用多种频响函数测量方法,根据激励参数的类型和响应传感器的类型,可分为振动模态、声振模态、声(腔)模态和应变模态等。
如果频响函数是基于力(力锤或激振器)和振动传感器(位移、速度或加速度等类型传感器)测量得到的,那么,把这种方式下得到的模态称为振动模态。这些频响函数在TPA分析中也称为力振传函VTF。
如果频响函数是基于力(力锤或激振器)和声压传感器测量得到的,那么,把这种方式下得到的模态称为声振模态。这些频响函数在TPA分析中称为力声传函NTF。如图4-14所示为对一块铝板进行的频响函数测量,红色为振动模态FRF,绿色为声振模态FRF。对比模态峰值,可以发现,两种方法得到的峰值频率是相同的。
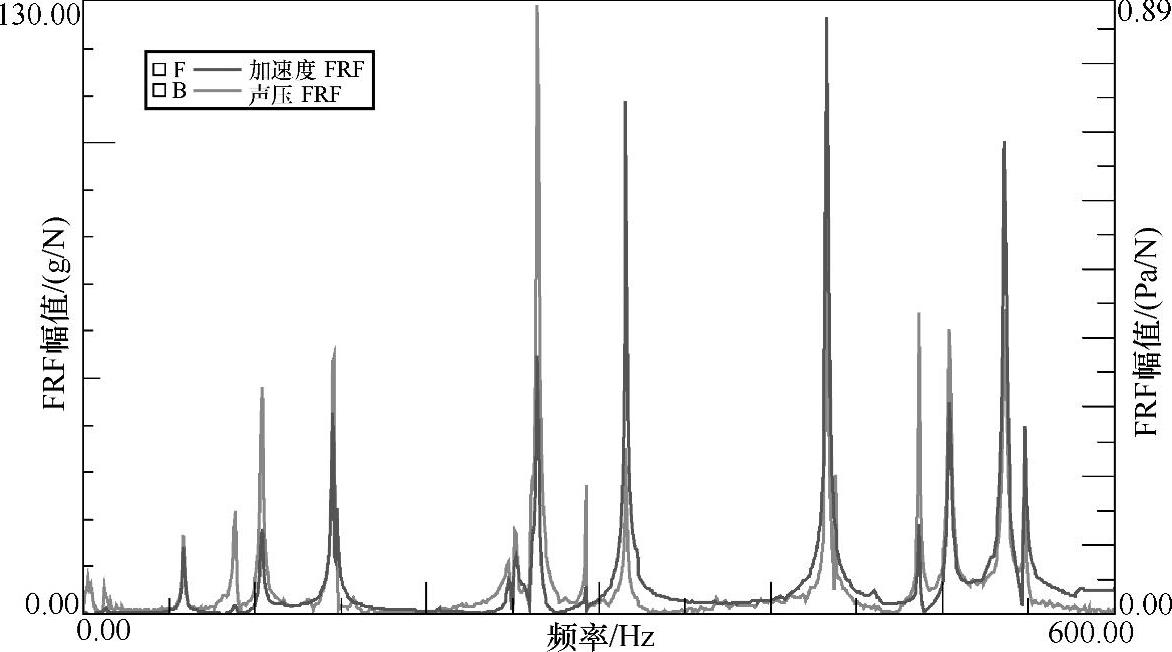
图4-14 振动模态FRF与声振模态FRF对比
另一方面,根据对称性,声振模态也可以采用体积声源当激励,测量加速度响应获得FRF。
如果激励采用体积声源,响应用声压传感器进行测量,那么,把这种方式得到的模态称为声(腔)模态。该方式下获得的频响函数在TPA分析中称为声声传函P/P。通常一些封闭的腔室需要做声模态,如汽车乘员舱。图4-15所示为某汽车乘员舱的某一阶声腔模态结果。
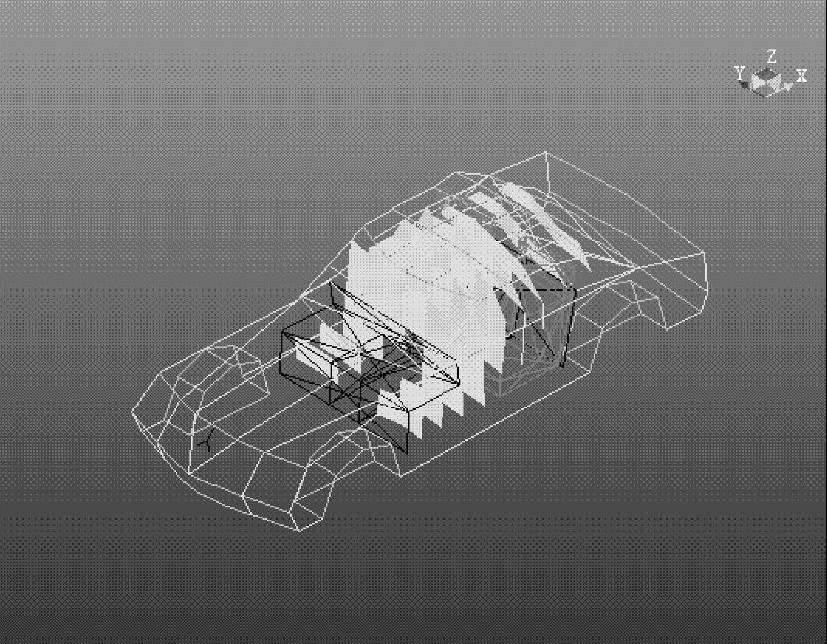
图4-15 某汽车乘员舱的某一阶声腔模态结果
以上几种测量方法,可以用图4-16来描述。最常见的还是采用力锤或激振器进行激励,测量振动响应得到振动模态。因为这样获得的频响函数质量高、信噪比好。而声振模态和声模态,相对而言,测量较少,特殊情况下才会采用这些方法测量分析。(https://www.xing528.com)
EMA除了以上几种类型之外,还有一种是用力作为激励,响应用应变片(花)进行测量,得到所谓的应变模态。由于应变片质量轻,相对于加速度传感器而言,质量载荷不会成为问题。但是应变测量下得到的频响函数信噪比比振动传感器测量差很多,这是由于结构的变形很微弱的原因。另一方面,从测量设置来说,应变测量比振动测量要付出更多的努力。理论角度上,位移模态的频响函数中包括的是输入输出位置的振型值,但在应变模态的频响函数中包括的是应变振型值和位移振型值。因此,应变模态的频响函数矩阵不再是对称矩阵。图4-17a所示为某个结构的位移模态,图4-17b所示为这个结构同一阶的应变模态,右侧的应变模态用颜色的深浅来表征变形大小。
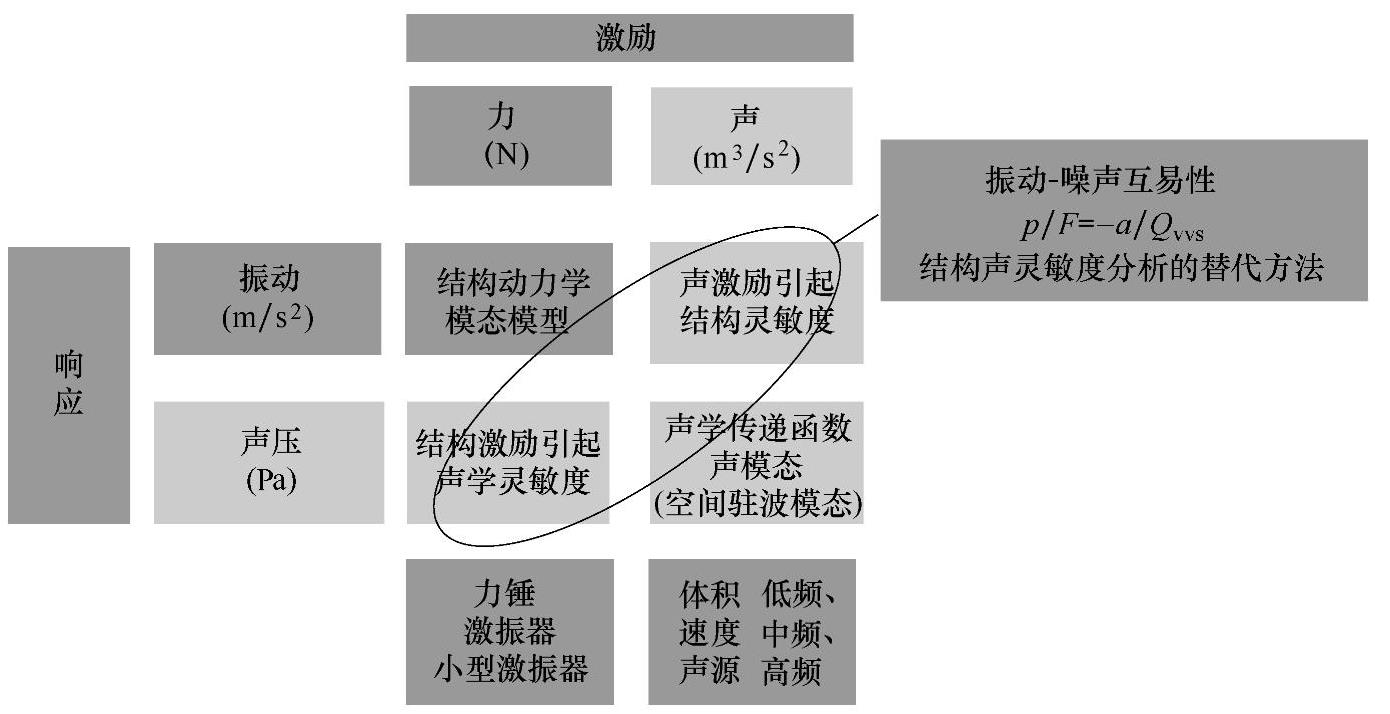
图4-16 典型的模态方法分类
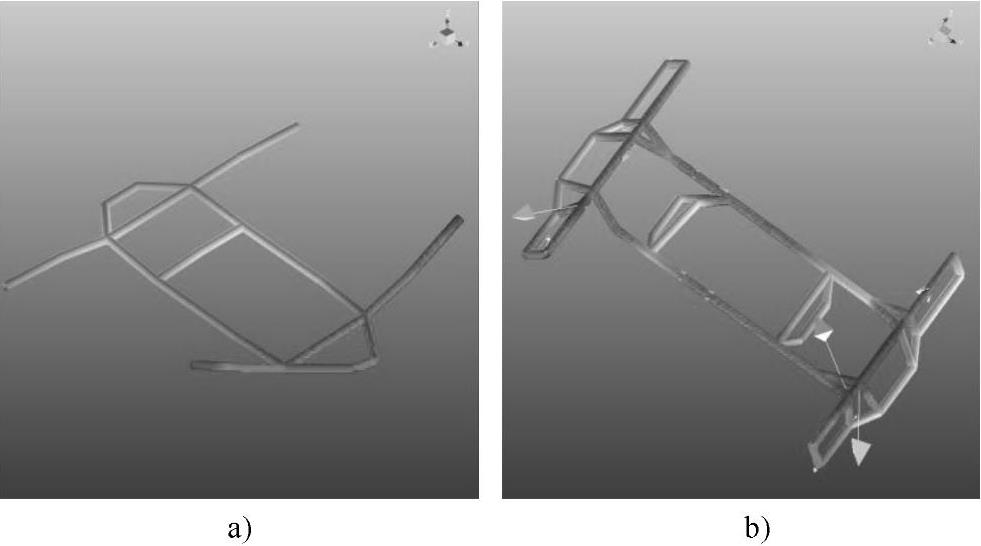
图4-17 位移模态与应变模态
a)位移模态 b)应变模态
OMA除了使用常规的振动传感器测量响应进行模态分析之外,还有一种类型称为基于阶次的模态分析(Order-Based Modal Analysis,OBMA),提取的也是模态参数。但使用的是阶次数据,因此,需要测量转速,并且尽可能多地使用多个PPR获得阶次数据,同时需要使用原始的时域信号。由于是基于阶次的模态分析,因此,选择的阶次不同,获得的频带宽度是不一样的,当要获得低频的模态时,应选择低阶次。
还记得在阶次分析中,瀑布图中存在明显的共振频率线吗?这就是说明结构的固有频率被阶次激励起来了。因此,进行阶次模态分析时,要求主要的阶次应能激起感兴趣的带宽,这样模态响应才能被很好地激起来。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。