



声强测量需要使用声强探头,声强探头有两种:P-U探头(声压-粒子速度探头,Pres-sure-Particle Velocity Probe)和P-P探头(声压-声压探头,Pressure-Pressure Probe),如图1-68所示。由于声强大小等于声压与质点速度的乘积,因此,P-U探头就是利用测量声压和粒子的振动速度来测量声强。P-U探头由一只声压传感器和一只速度传感器组成,如图1-68a所示。
1954年T.J.Shults提出用测量声压梯度方法测量质点速度,从而使声强测量获得了实际应用,而P-P探头正是基于这种原理来测量声强的。P-P探头由一对精心挑选的幅值和相位匹配的传声器组成,两个传声器之间存在间距,如图1-69所示。探头具有明显的方向性,测量时通常使声音是从1#传声器向2#传声器传播。这种声强探头由于两个传声器是相向对立的,因此,也称这种声强探头为对立式探头。
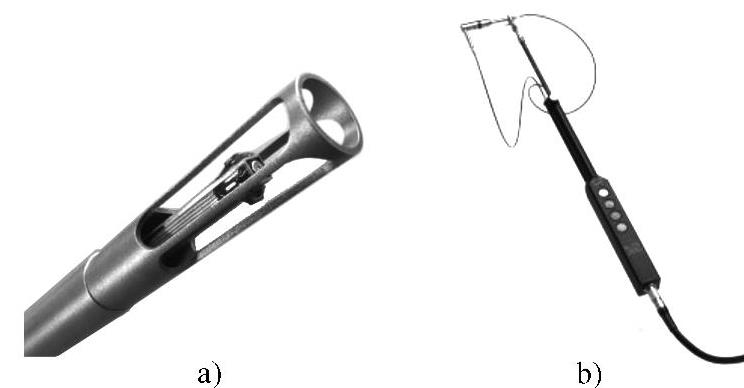
图1-68 两类声强探头
a)P-U探头 b)P-P探头
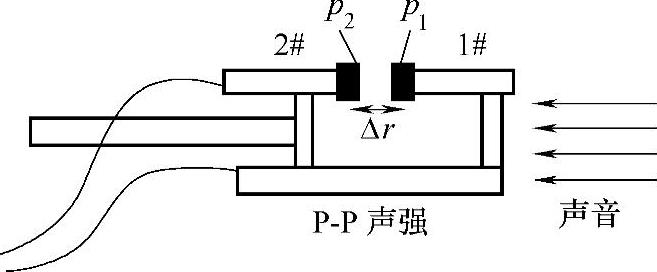
图1-69 P-P探头结构示意图
使用对立式声强探头时,如果测量的声音从不同的方向传播过来,则在倍频程图中采用不同的颜色表示。倘若声强测量软件使用Test.lab,且声音是从1#传声器传播到2#传声器,则在声强的倍频程图中用绿色表示,如果声音传播方向相反,则用红色表示,如图1-70所示。
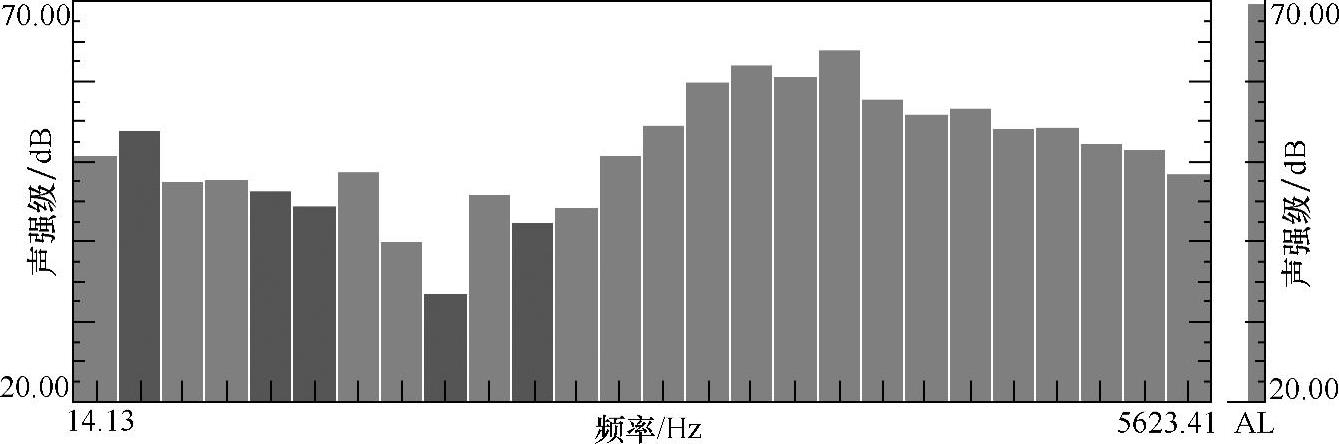
图1-70 声强的1/3倍频程图(https://www.xing528.com)
两个传声器之间安装不同的隔离柱(Spacer)决定了声强测量的频率范围,通常隔离柱越短,频率范围越宽,但下限频率越高。通常声强探头隔离柱的长度与对应的频率范围见表1-17。但也有不同的情况,如GRAS50AI-L的各隔离柱长度对应的频率范围略高于表1-17中的频率范围。
表1-17 隔离柱长度对应的频率表

声强探头中的两个传声器是经过精心挑选的,幅值和相位匹配,但并不代表二者的相位差为0。为了进一步提高测量精度,还需要对声强探头进行相位校准,以便获得两个传声器的相位差曲线,提高测量精度。
除了对立式探头之外,还有并列式,如图1-71所示,但并列式声强探头两个传声器之间的间距是固定的,不可调整。这种形式的探头一般用于特定情况下的声强测量,如测量路噪。有时还在声强探头的传声器上安装鼻锥,如图1-72所示,用于高风速下的声强测量。
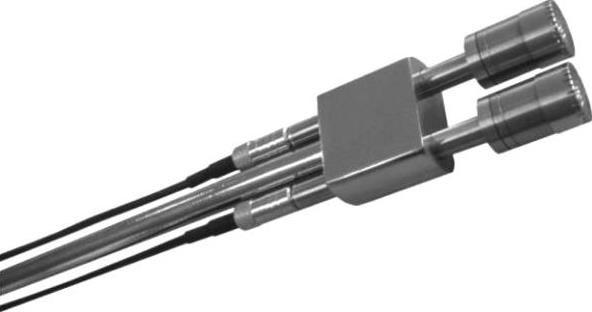
图1-71 对立式声强探头图
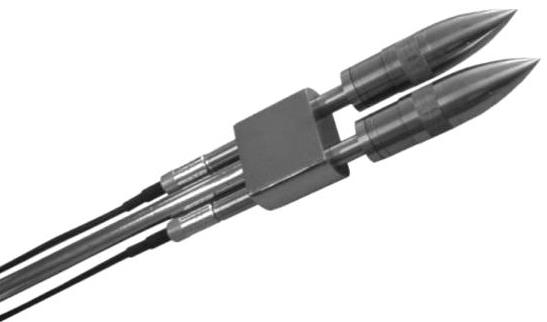
图1-72 带鼻锥的声强探头
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。