



微电网中常含有多个分布式电源,在孤网模式下,多个分布式电源可以看成多个逆变器并联系统。并联逆变器均流控制是为了抑制逆变器之间的有功、无功环流,目前均流控制方法包括有互联通信线和无互联通信线。有互联通信线包括集中式、主从式、瞬时均流控制等多种方式,需要专门的通信线路进行连接,成本高、冗余度大。无互联通信线方式的均流控制采用基于下垂控制的方法,在分布式电源中广为使用。
图6-31是两个逆变电源并联等效电路,其中E1和E2分别为逆变器1和逆变器2的输出电压,Ri+jXi为逆变器输出阻抗和逆变器到交流母线之间的线路阻抗,U为交流母线负载端电压,I1、I2为逆变器输出电流,I0为负载电流。由图可得逆变电源输出的有功功率和无功功率:
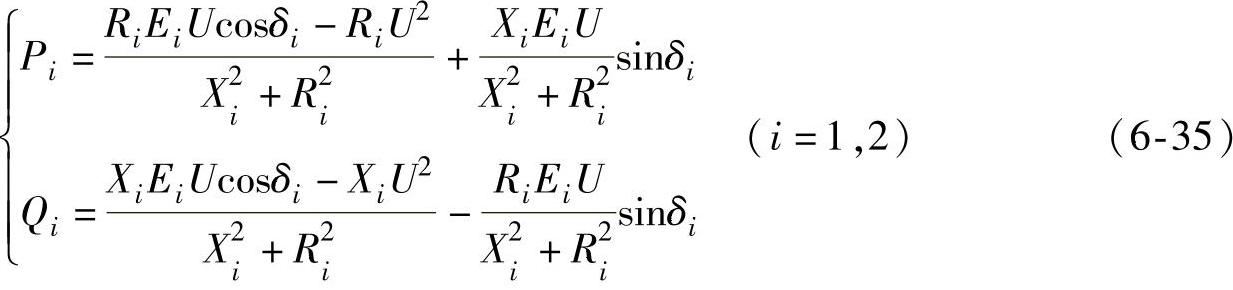
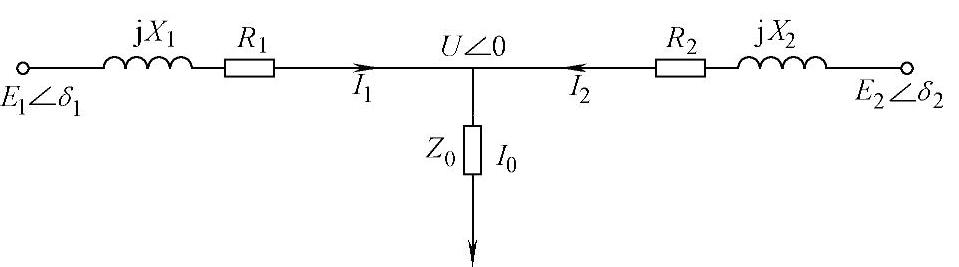
图6-31 两个逆变电源并联等效电路图
假设逆变器输出阻抗和线路阻抗中的阻性成分相对于感性阻抗很小,整个系统呈感性,且逆变器并联系统中输出阻抗相同,即R1=R2≈0,那么式(6-35)可以变为
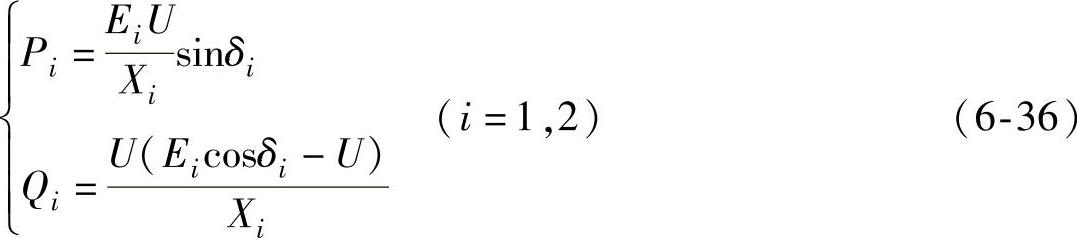
同时由于逆变电源的输出电抗和线路阻抗相比于负载阻抗非常的小,因此逆变电源输出电压矢量Ei与并联系统输出电压矢量U之间的相差也很小,即δi≈0。于是,式(6-36)可进一步近似为
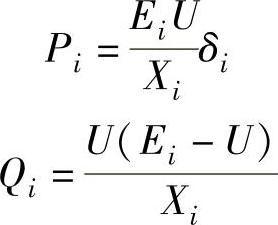
由于在实际中,并联系统输出电压幅值U的变化范围不会很大,可以近似认为是一个常数,因此表达式可变为
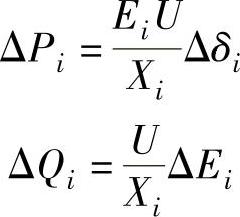
上式可以看出:
1)并联逆变器单元输出的有功功率的大小主要取决于逆变器输出电压的相角与交流母线的电压相角之差Δδi,如果相角差大于0,表示逆变器输出有功功率,小于0则表示逆变器吸收有功功率。
2)并联逆变器单元输出的无功功率的大小主要取决于逆变单元输出电压的幅值变化ΔEi,如果ΔEi大于0,表明逆变器输出无功功率,否则表示逆变器吸收无功功率。
3)由于相位控制是通过调节输出频率来实现的,逆变电源输出的角频率为Δωi=Δδi/Δt,这样频率的调节改变了逆变输出的相位,同时也改变了逆变输出的有功功率。各并联单元输出电压的频率和幅值与其输出有功功率和无功功率具有对应的近似线性耦合关系。在系统输出电压一定时,各并联逆变单元就可以通过检测本单元的输出功率的大小,根据自身容量把频率(相位)与幅值两个要素通过输出的有功功率和无功功率进行近似解耦控制。令

则可以得到基于电压-频率的下垂特性公式:
fi=f0i-kpiPi(https://www.xing528.com)
Ei=E0i-kqiQi (6-37)
式中 f0i——第i台逆变电源空载输出频率;
E0i——第i台逆变电源空载输出电压幅值;
kpi——第i台逆变电源输出角频率的下垂系数;
kqi——第i台逆变电源输出电压幅值的下垂系数;
Pi——第i台逆变电源输出有功功率;
Qi——第i台逆变电源输出无功功率。
从下垂公式(6-37)可以看出,各逆变并联单元输出电压的频率和幅值与其输出有功功率和无功功率具有对应的近似线性耦合关系,其实质是各逆变单元检测自身输出功率,通过下垂控制得到输出电压频率和幅值的指令值,然后各自反向微调其输出电压幅值和频率,达到系统有功和无功功率的合理分配。
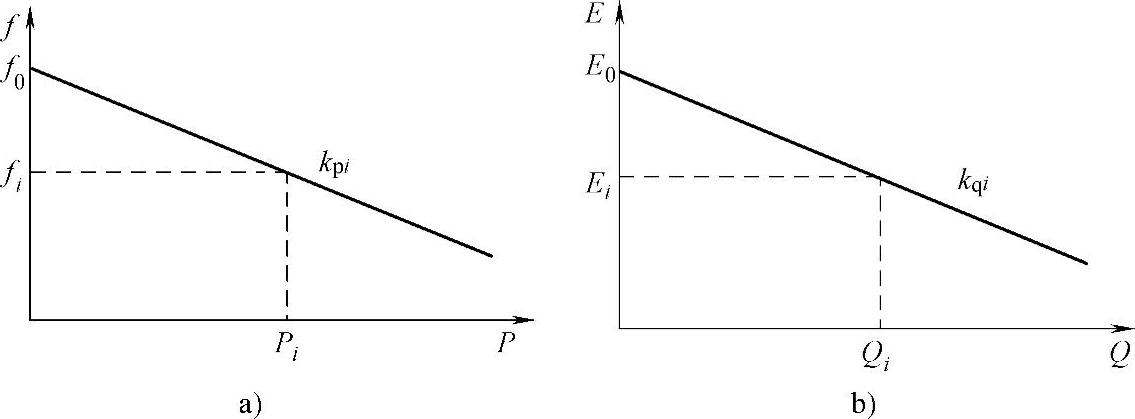
图6-32 并联逆变器电压-频率下垂特性示意图
a)有功功率特性 b)无功功率特性
式(6-37)可以用图6-32表示,图中给出了逆变电源并联下垂特性。可以看出,各逆变电源通过调整各自输出电压的频率和幅值,使其降低到一个新的稳定工作点,从而实现输出功率的合理分配。如果逆变电源的下垂斜率相等,则在稳定后各逆变电源的输出功率相等;如果下垂斜率不相等,则斜率大的承担功率小,斜率小的承担功率大。
图6-33描述的是两个分布式电源DG1和DG2采用下垂控制方法的逆变器控制结构图。该控制经过三级闭环控制,即下垂功率控制环、电压环和电流控制环。首先,逆变器输出经滤波器进行滤波,采集逆变输出电压u和滤波电流i,经过功率计算求取平均有功和无功功率,通过下垂公式计算得到逆变器输出频率和幅值的给定值,将两者合成后即可得到给定电压,与逆变器输出电压相比较后经电压控制环得到给定电流。同样给定电流与逆变输出电流比较后经电流控制环得到PWM波,驱动逆变器的运转实现微电网下的逆变器控制。这里DG1和DG2下垂系数不同。
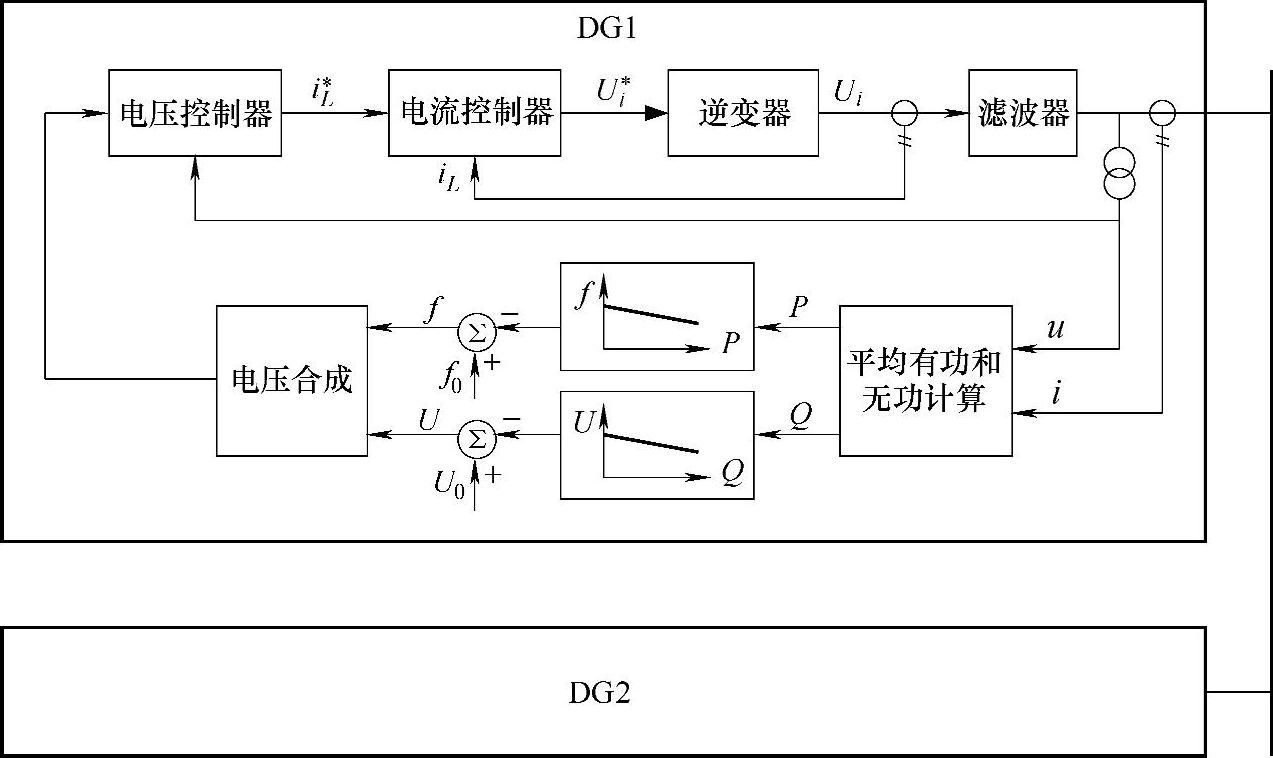
图6-33 分布式电源下垂控制结构框图
图6-34仿真了DG1和DG2分布式电源采用下垂控制方式的各变量运行特性。0.48秒前只有DG1单独为负载供电;0.48秒时刻DG2投入到运行,共同承担负载的功率;1秒时刻添加负载后DG1和DG2共同为负载供电;1.5秒时刻切除负载后共同为负载供电;2秒时刻DG2退出微电网运行。在负载变化和电源功率变化时各分布式电源的频率响应、有功输出、无功输出、电流变化曲线,可以看出,系统可以根据下垂特性自行调整到稳定状态运行。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。