



从图6-3可以看出,光伏阵列最大输出功率会随着光照强度和光伏阵列表面温度的改变而变化。为了充分利用太阳能,往往希望光伏电池阵列始终输出最大功率,即工作在最大功率点,为此,必须对光伏发电装置实施最大功率点跟踪控制。在光伏并网发电系统中,通过对光伏阵列最大功率点的搜索和跟踪,实现并网电流的最大化,从而保证并网功率最大。常用的最大功率点跟踪方法有定电压法、扰动观察法、增量电导法、模糊控制法等[5]。
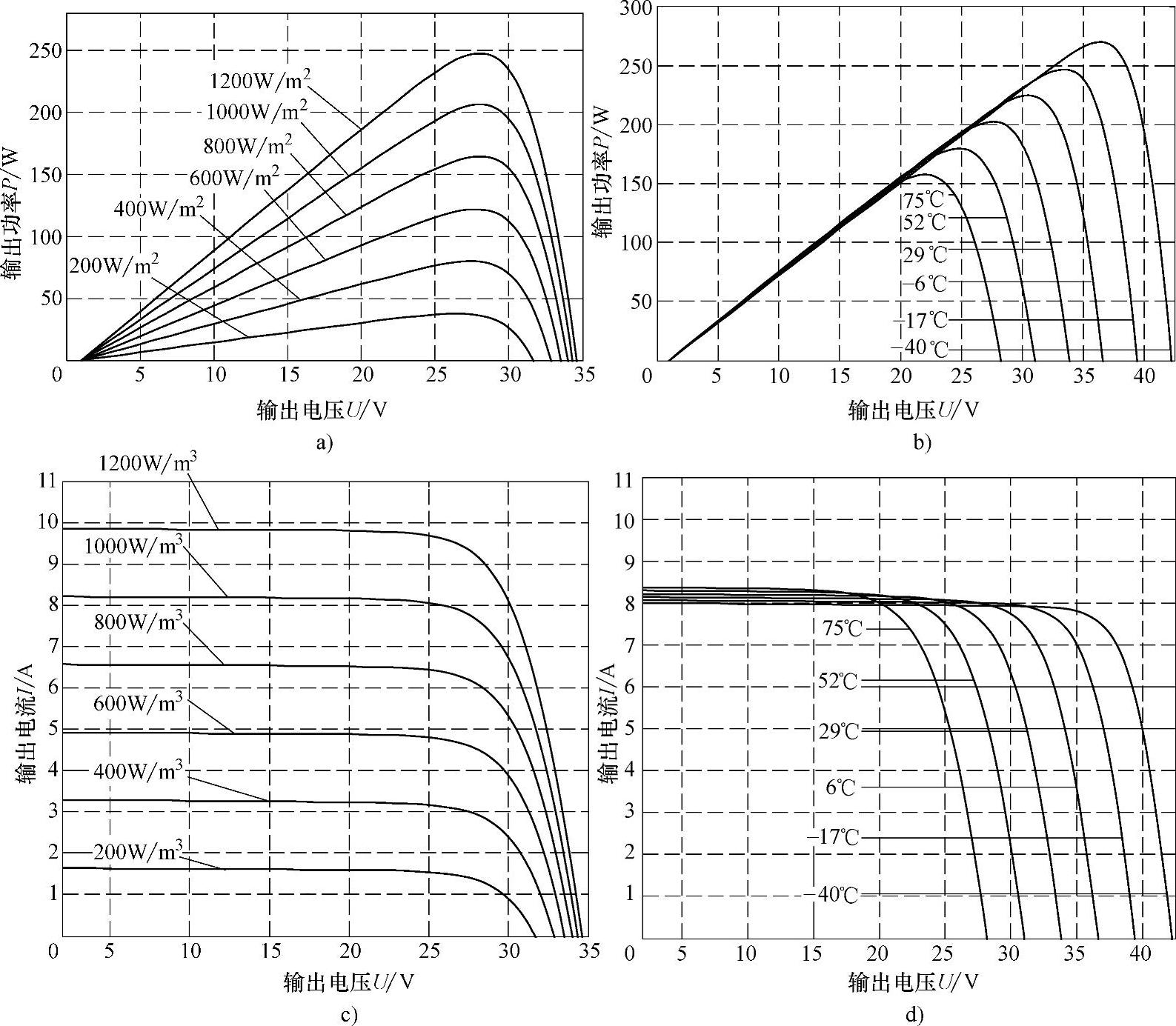
图6-3 不同光照和温度下的光伏模块P-U特性和I-U特性
a)不同光照下P-U曲线 b)不同温度下P-U曲线 c)不同光照下I-U曲线 d)不同温度下I-U曲线
定电压法:在光照较强且基本不变的情况下,光伏阵列最大功率点所对应的电压变化不大,因此可以采用定输出电压控制实现MPPT。这种方法简单、系统稳定性好,但是当光线发生剧烈变化时则不适用。
扰动观察法:由光伏电池P-U特性曲线可知,若在光伏阵列工作电压上施加一个小扰动,在电压变化的同时,检测功率的变化,根据功率和电压的变化方向,决定下一步电压改变的方向,使其向最大功率点靠拢。该方法原理简明,也易于实现,但是在不断扰动观察的过程中,系统在最大功率点附近会持续振荡,导致部分功率损耗。跟踪步长对最大功率点跟踪的速度和准确度影响较大,宜慎重选择。
增量电导法:从光伏电池特性可以看出,光伏阵列的P-U曲线是一个单峰曲线,在最大功率点,功率对电压的导数为零。在最大功率点的左侧区域,功率对电压的导数为正;在最大功率点的右侧区域,功率对电压的导数为负。所以,可以根据功率对电压的导数的正负来判别当前工作点的位置,并对工作电压做适当调整。增量电导法通过设定一些很小的变化阈值,使光伏电池阵列最后稳定在最大功率点附近的某个点,而不是来回地跳动。该方法的缺点是会受到采样准确度的影响,同时选择合适的步长比较困难。
模糊控制法:由于光照变化的不确定性、光伏电池阵列的温度变化、负载的变化和光伏阵列I-U曲线的强烈非线性,光伏阵列最大功率点是时刻变化的。针对这样的非线性系统,使用模糊逻辑控制方法进行控制,将会获得较为理想的控制效果。下面使用模糊控制方法来实现最大功率点跟踪[6]。
由于光伏电池阵列的输出电压一般较低,所以采用Boost(升压)电路,为负载或后级并网逆变电路提供足够高的直流电压。实时采集光伏电池阵列的输出电压UPV和电流IPV,利用模糊控制算法,计算输出占空比d,达到最大功率点跟踪的目的。如图6-4所示。
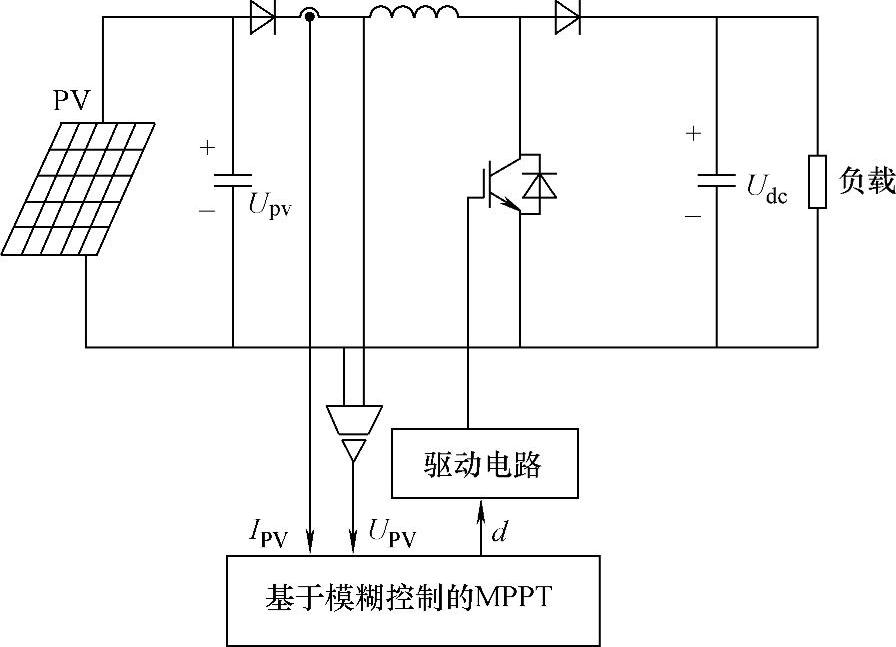
图6-4 MPPT电路结构示意图
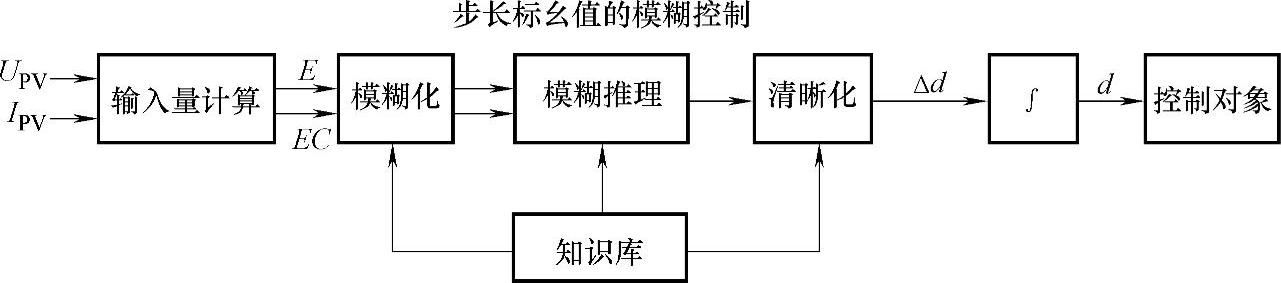
模糊控制通常有三个阶段:模糊化、模糊推理和输出量解模糊。图6-5是基于dPPV/dUPV=0原理的模糊控制系统组成框图。对控制步长Δd进行积分并限幅,得到斩波电路的占空比d。
 (https://www.xing528.com)
(https://www.xing528.com)
图6-5 模糊控制组成框图
输入物理量是光伏电池阵列的输出电压UPV和电流IPV。由UPV和IPV计算光伏电池阵列输出功率PPV。当光伏电池阵列输出功率和输出电压之间满足dPPV/dUPV=0时达到最大功率点,因此选择dPPV/dUPV和Δ(dPPV/dUPV)作为模糊控制的输入变量E和CE。模糊控制的输出变量为步长标幺值Δd。输入量和输出量的定义,如式(6-2)所示。输入量E、EC和输出量Δd的模糊子集都是{NB,NS,ZE,PS,PB}。输入量和输出量都用标幺值表示,如图6-6所示。

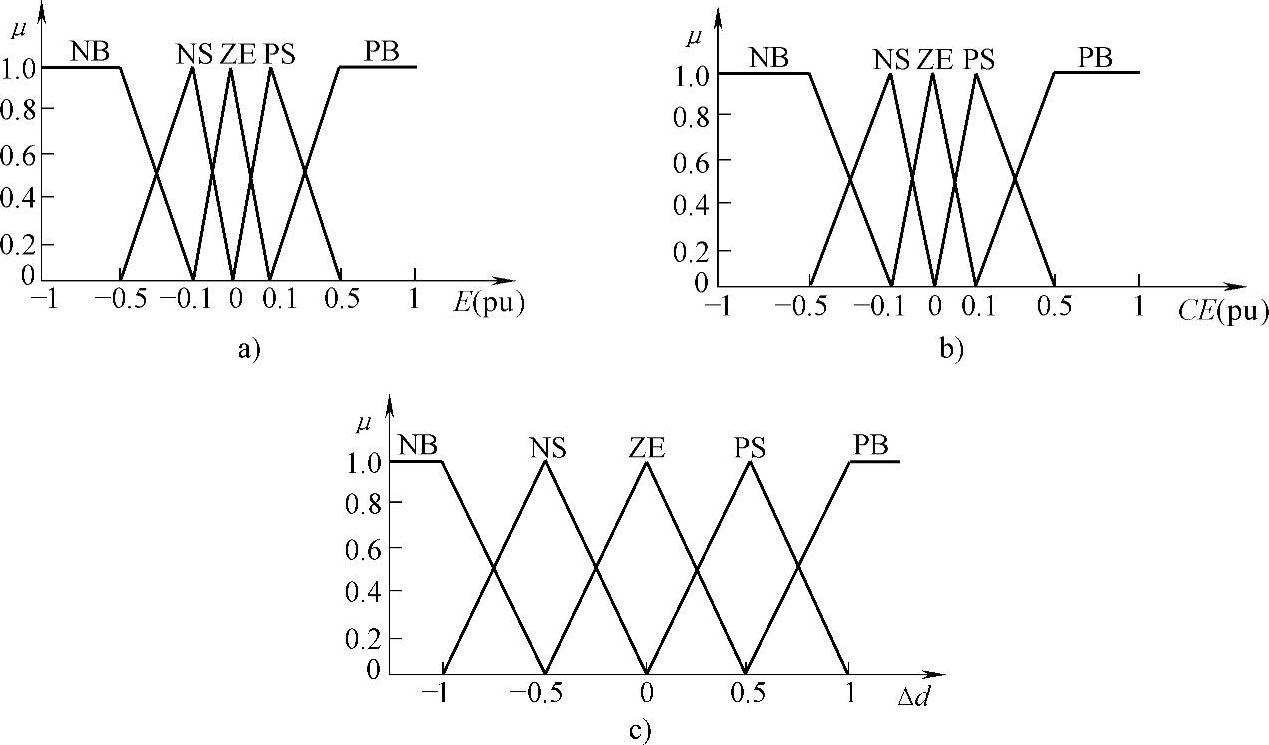
图6-6 E、EC和Δd的隶属函数
a)输入量E的隶属函数 b)输入量EC的隶属函数 c)输出量Δd的隶属函数
光伏电池阵列的P-U特性曲线中包含了光伏电池输出功率的四种变化过程,根据E和EC的状态确定步长变化值,使其功率靠近最大点,制定模糊规则表。最后将上述所推理得到的模糊量转化成清晰控制量。通常解模糊有最大隶属度法、中位数法和权重法。
利用PSIM软件,对基于模糊控制法的最大功率点跟踪系统进行仿真研究。仿真条件:在标准条件下的光伏电池阵列开路电压为38V,短路电流为3.2A。仿真结果如图6-7所示,图a为输出功率(上)和光照强度(下)的变化曲线,当光照发生突变时,该模糊控制方法能快速跟踪最大功率点,并且功率波动很小,所以跟踪过程的功率损耗也相应地减小。光伏电池阵列的P-U输出波形如图b所示,曲线顶点为光伏阵列的最大功率点,当光照发生变化时,光伏阵列输出的最大功率点也相应地跟随变化。
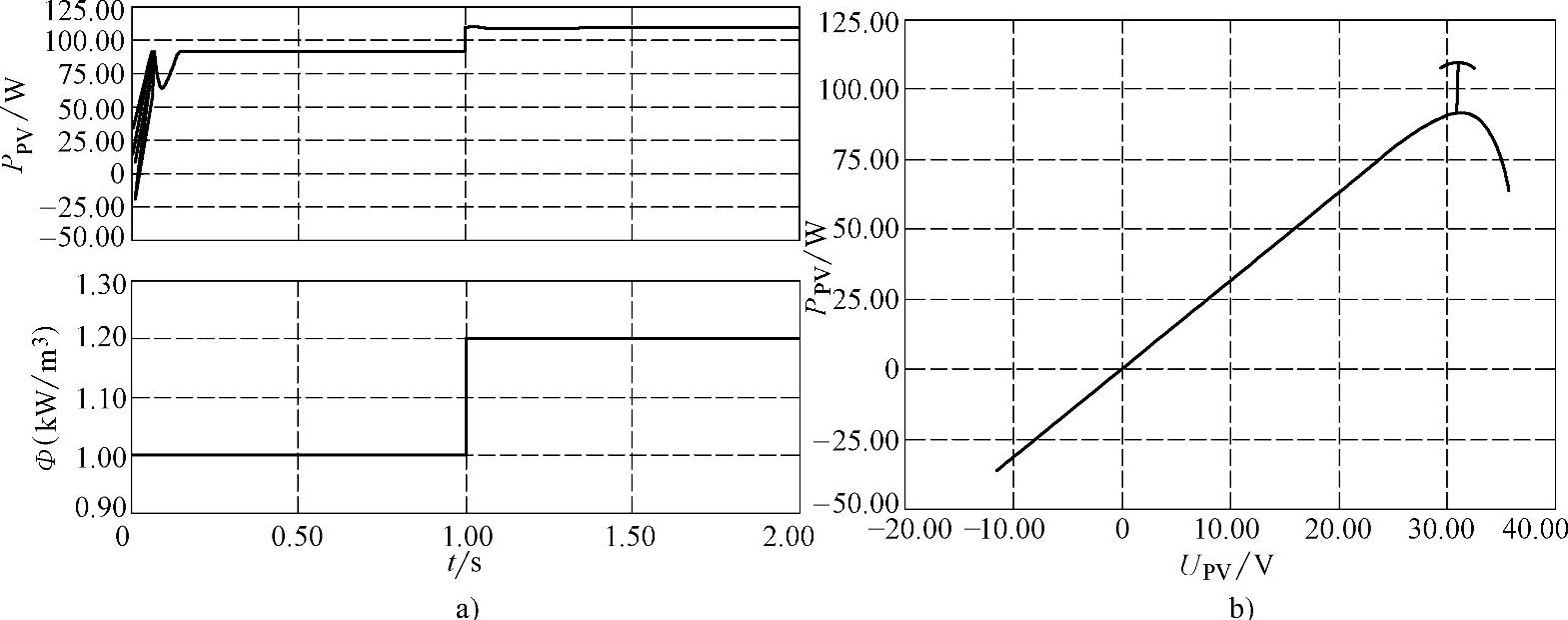
图6-7 模糊控制法仿真结果
a)输出功率和光照强度波形 b)光照变化下的P-U波形
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。