



电流跟踪控制电路是APF的重要环节,根据补偿电流指令信号与实际补偿电流之差,得到开关器件的PWM信号,使补偿电流实时跟踪其指令信号的变化。如何由电流误差产生PWM信号是APF的一个重要问题,关系到APF的性能和特点。
图5-13为控制策略仿真分析用的基于PSIM的APF仿真系统,系统参数如下:最大补偿电流200A,串联电感0.3mH,直流电容2200μF,直流电压设定值为800V,三相交流电网电压380V/50Hz,谐波源采用相控整流器。
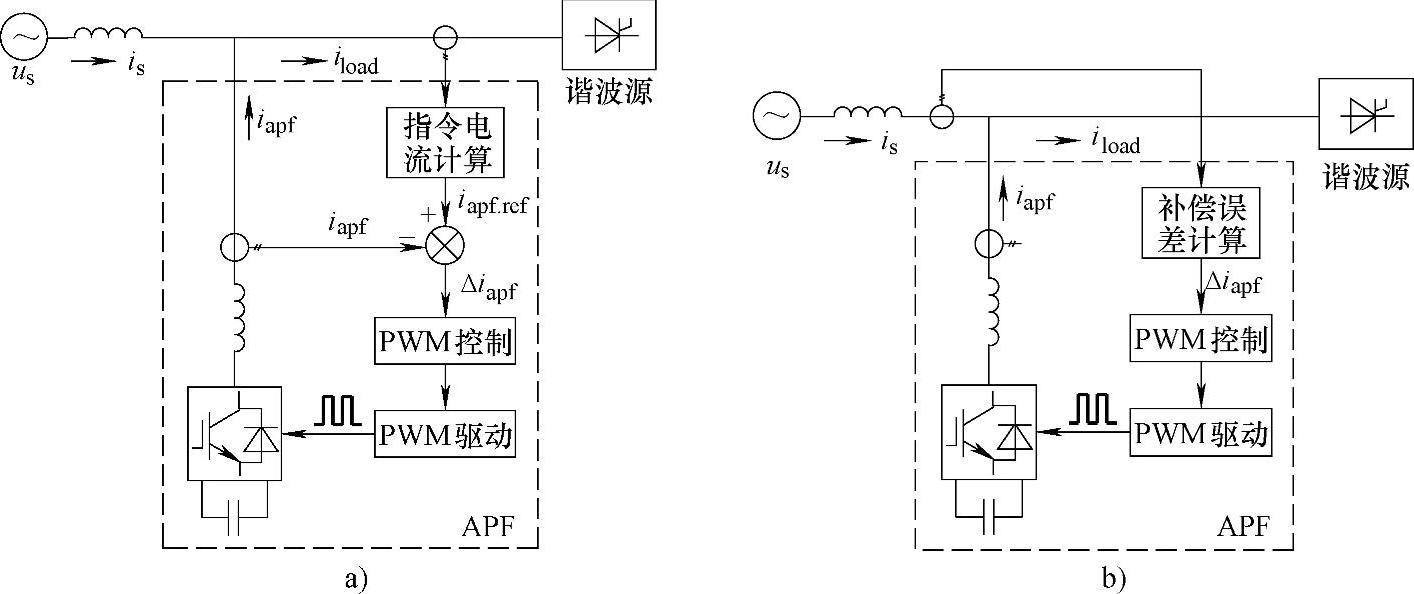
图5-12 APF的信号取样与控制系统结构
a)基于负载电流信号的控制 b)基于电源电流信号的控制
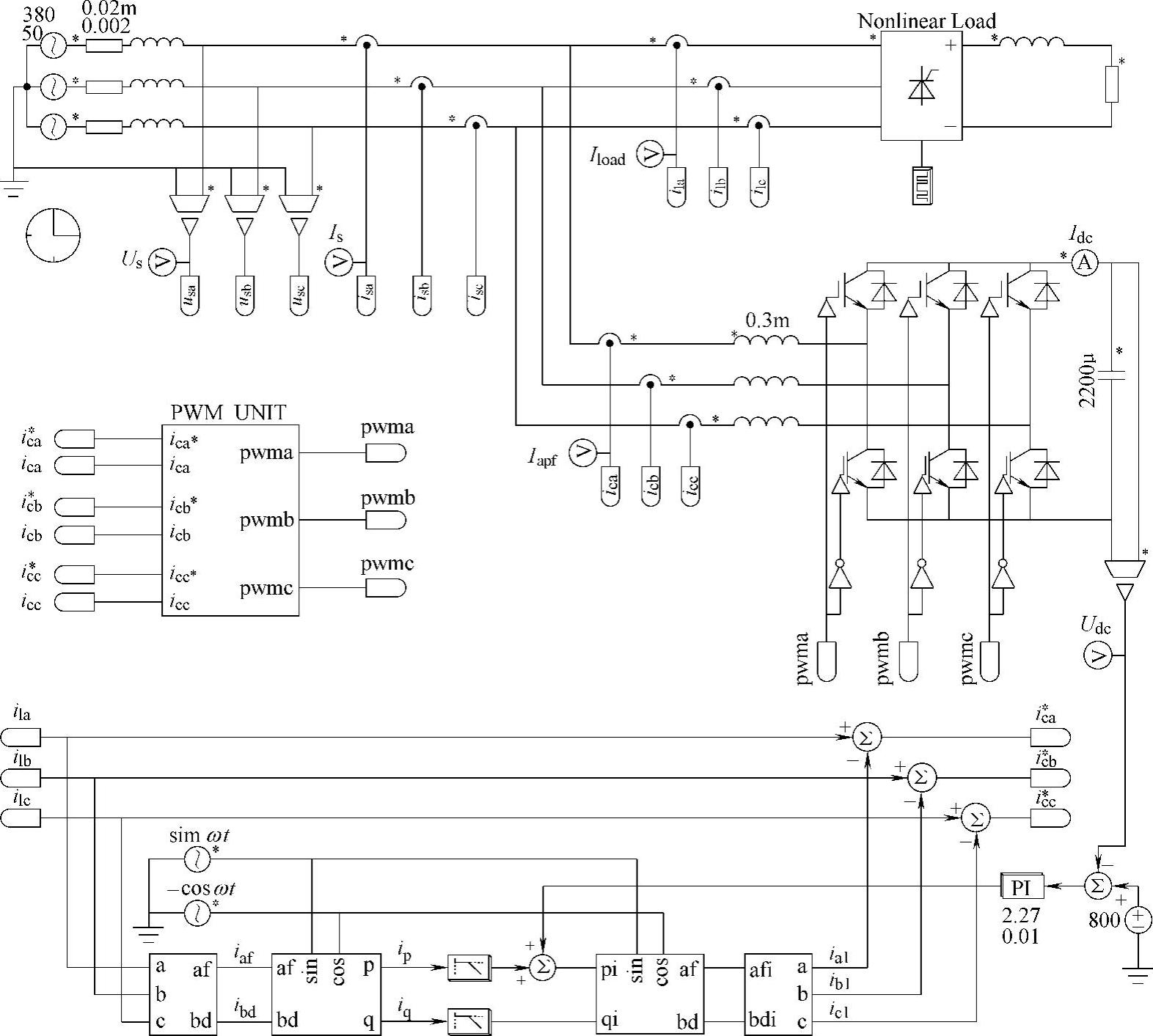
图5-13 APF的仿真系统
注:Nonlinear Load—非线性负载;PWM UNIT—PWM单元。
(1)滞环比较
如图5-14所示,将补偿电流指令信号与实际补偿电流信号进行瞬时值比较,两者之差作为滞环比较器的输入,通过滞环比较器产生开关器件的PWM控制信号。设滞环宽度为h(h=2ΔI),当Δiapf<h时,滞环比较器输出信号保持不变;如果Δiapf≥h,滞环比较器的输出电平将翻转,补偿电流iapf的变化方向发生改变。补偿电流信号只在±ΔI区间内呈现锯齿波形状跟随参考波形的变化。
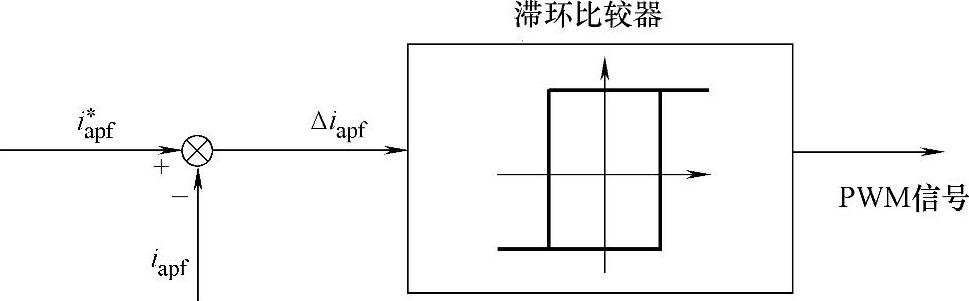
图5-14 滞环比较调制策略
在滞环比较调制策略中,ΔI对补偿电流的跟随性能和误差有较大的影响,滞环宽度一般取为APF额定电流的5%以内。当ΔI较大时.开关器件的开关频率较低,对电力半导体器件的要求不高,但是跟随误差较大。反之,当ΔI较小时,虽然跟随误差小,但是开关频率较高。若滞环宽度固定,则电流跟随误差是一定的,但是电力半导体器件的开关频率是变化的,当补偿电流较小时,补偿电流的相对跟随误差较大;而当补偿电流较大时,则半导体器件的开关频率会较高。针对定环宽滞环比较策略的这一缺点,可采用变环宽滞环比较策略,即滞环宽度ΔI随补偿电流的大小自动调节。
滞环比较策略的硬件电路十分简单,属于实时闭环控制方式,电流响应很快,且不需要载波信号。图5-15给出滞环比较方式的PSIM仿真逻辑,图5-16为5%滞环下的仿真结果。
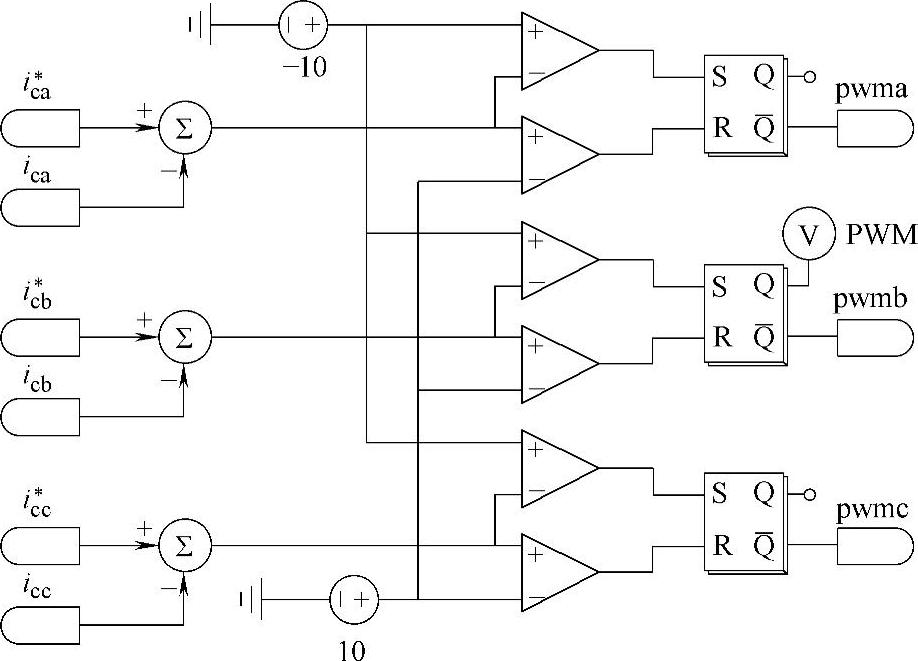
图5-15 滞环比较的仿真逻辑图
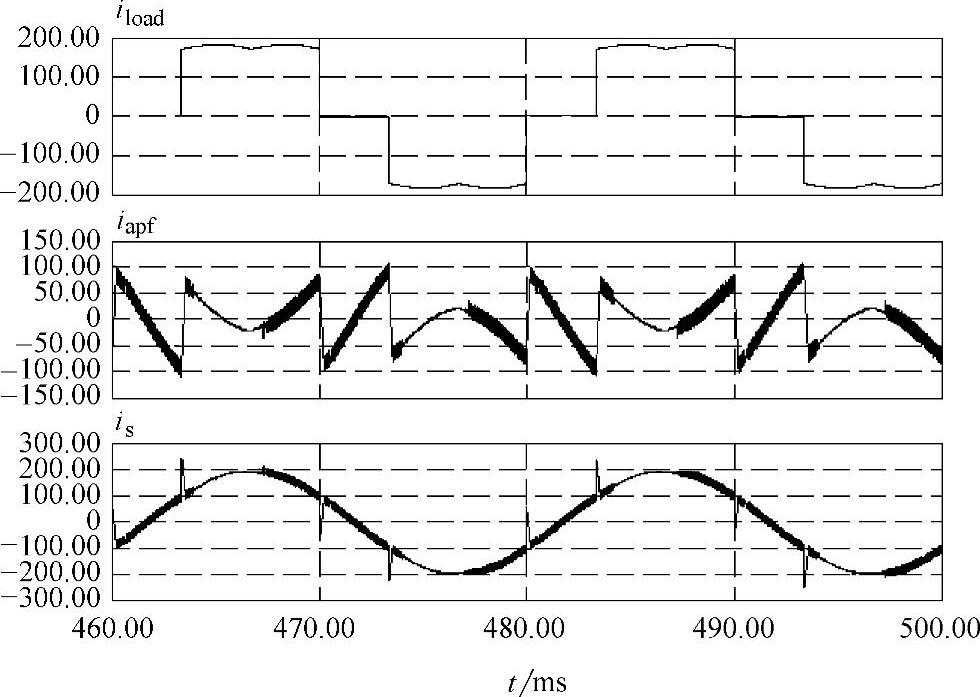
图5-16 滞环比较方式的滤波效果
(2)周期采样
图5-17所示的周期采样调制方式也是一种瞬时值比较方式,它以固定的周期对电流误差信号进行判别,并根据判别时刻误差的正负来输出高低电平。显然,PWM信号的变化至少需要一个时钟周期,功率器件的开关频率则不会超过定时器时钟频率的一半,从而克服了滞环比较策略中有可能导致功率器件开关频率过高这一缺点。
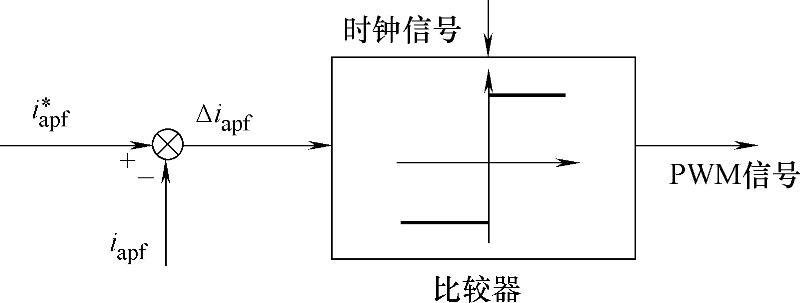
图5-17 周期采样调制策略
周期采样调制策略的缺点是补偿电流的跟随误差不固定,误差大小取决于采样周期和APF串联电抗器的大小。图5-18给出周期采样方式的PSIM仿真逻辑,图5-19为20kHz周期采样时的仿真结果。
(3)三角载波调制
图5-20所示为三角载波调制策略,其特征在于电流误差经过PI调节之后与三角载波进行比较,并直接产生PWM信号。显然,功率器件的开关频率等于三角载波的频率。这种策略的输出电流质量相对较高,但并非瞬时电流直接跟踪控制,电流跟踪的实时性能稍差。
根据并联型APF的电路结构,可以得到图5-21所示的APF的电流控制系统图,其中,左边为PI调节器,中间环节为三角载波调制的等效传递函数,右边环节为VSC交流侧系统的传递函数,L为包含串联电抗器和电网分布阻抗在内的等值电感,R表征包括串联电抗器、电网分布阻抗和VSC损耗在内的等值电阻,TPWM为PWM调制环节的等效时间常数,其值取载波周期的一半。
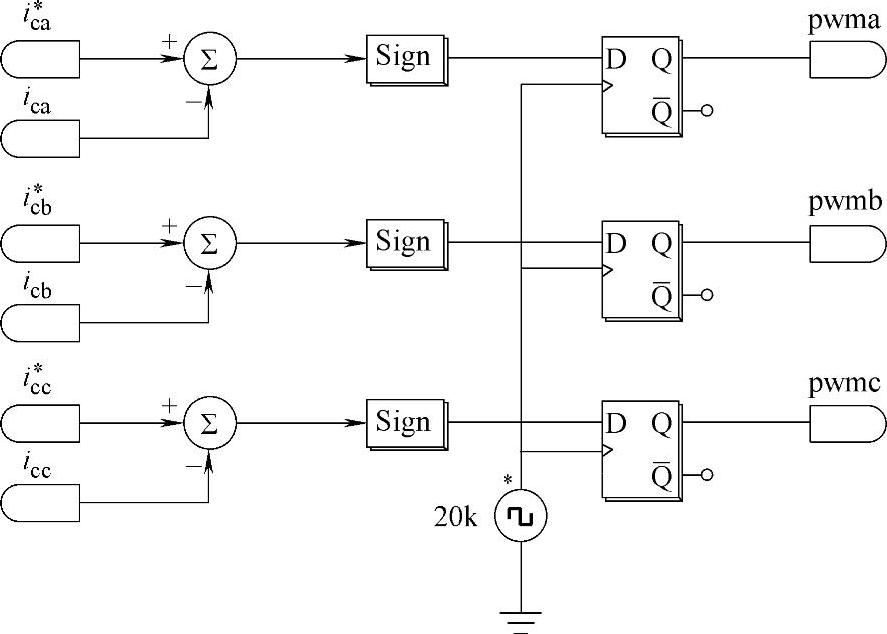
图5-18 周期采样的仿真逻辑图
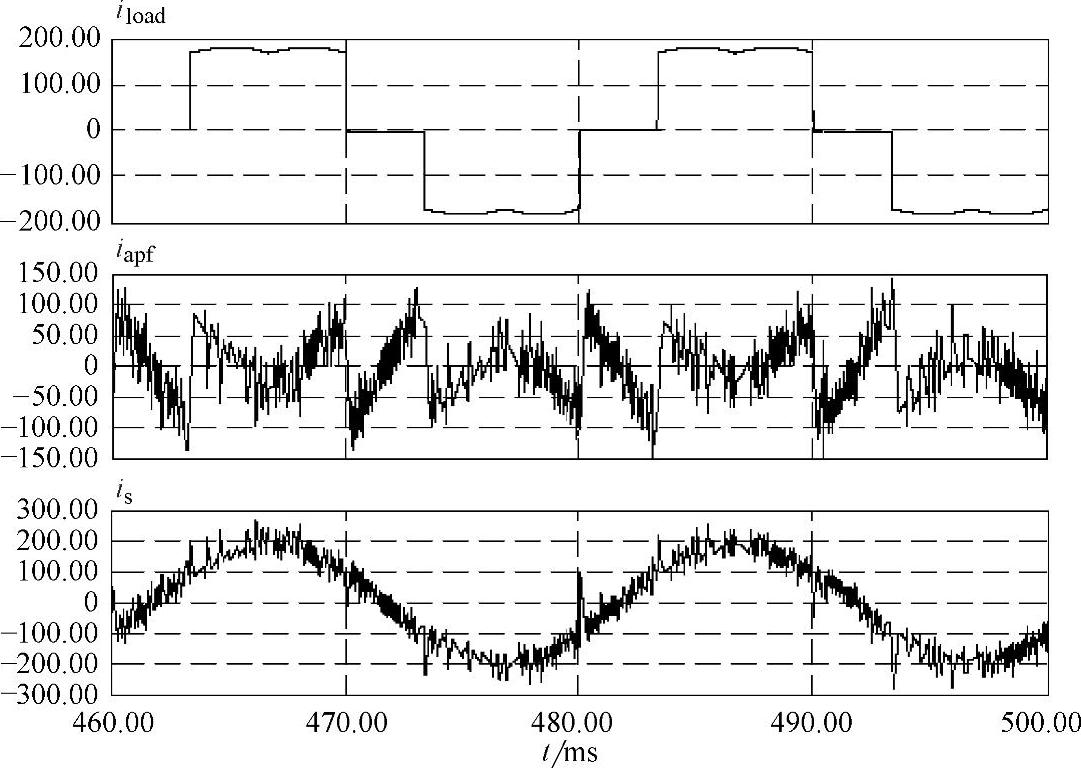
图5-19 周期采样方式的滤波效果
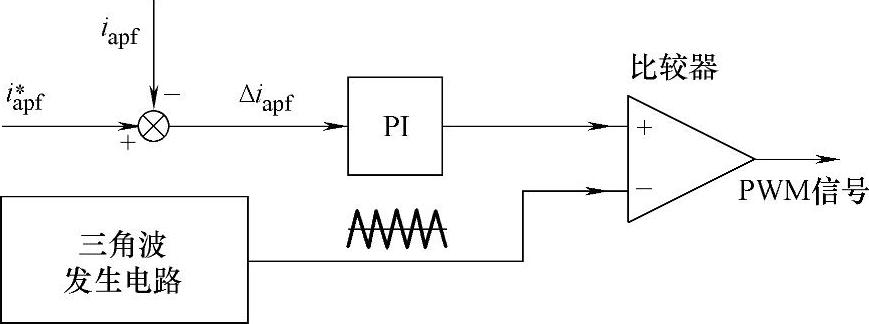
图5-20 三角载波调制策略
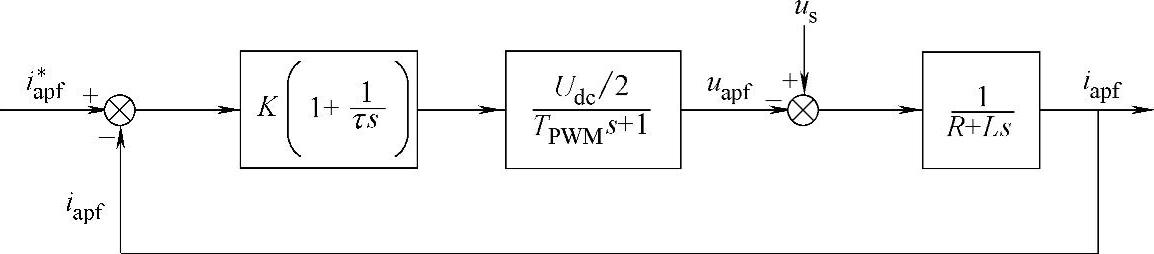
图5-21 三角载波调制方式下APF的系统结构图(https://www.xing528.com)
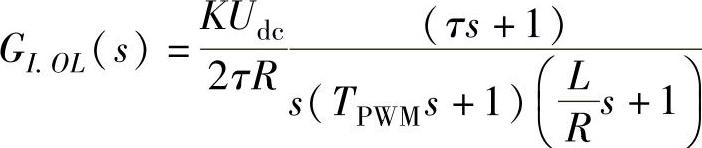
由图可得APF的开环传递函数:
在实际系统中,下面关系始终存在:
因此,APF开环传递函数可以简化如下:

显然,这是一个典型的三阶系统。PI参数可以按照三阶最优系统进行整定,即
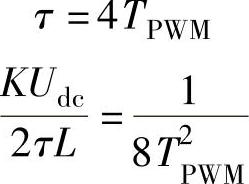
于是,可得如下PI参数:

式中 fcarry——三角载波的频率。
对于本节的仿真示例来讲,在载波频率20kHz下,计算可得PI参数为:K=0.015,τ=0.0001。图5-22给出三角载波调制方式的PSIM仿真逻辑,图5-23为相应的仿真结果。
(4)预测电流控制
若采用间接电流控制方式,首先需要根据APF的补偿电流指令iapf.ref推算APF逆变器输出电压指令uapf.ref。根据图5-11,若忽略APF等值电阻和电网等值阻抗,APF交流侧电流与电压有如下关系:

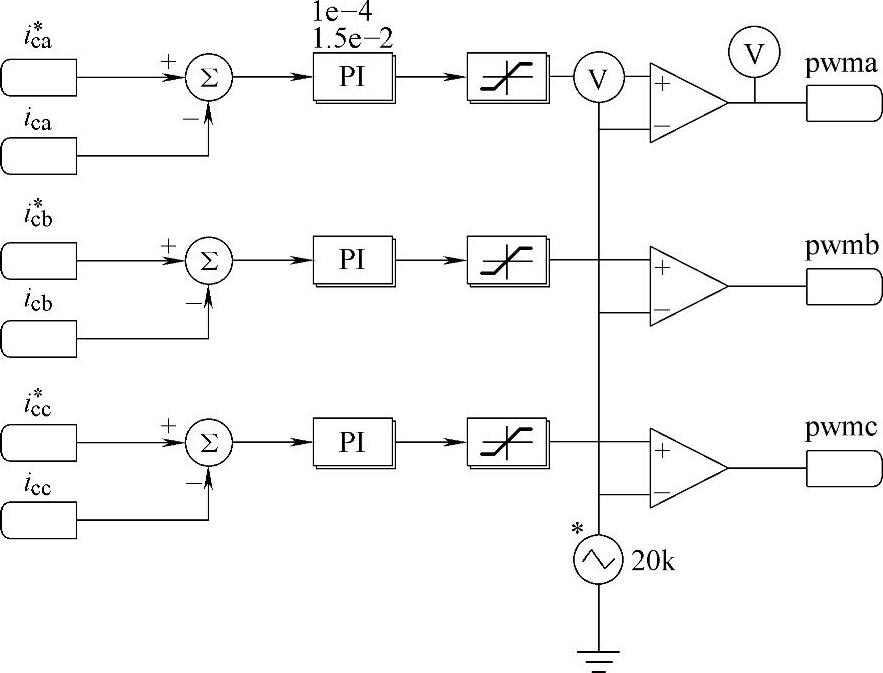
图5-22 三角载波调制方式的仿真逻辑图
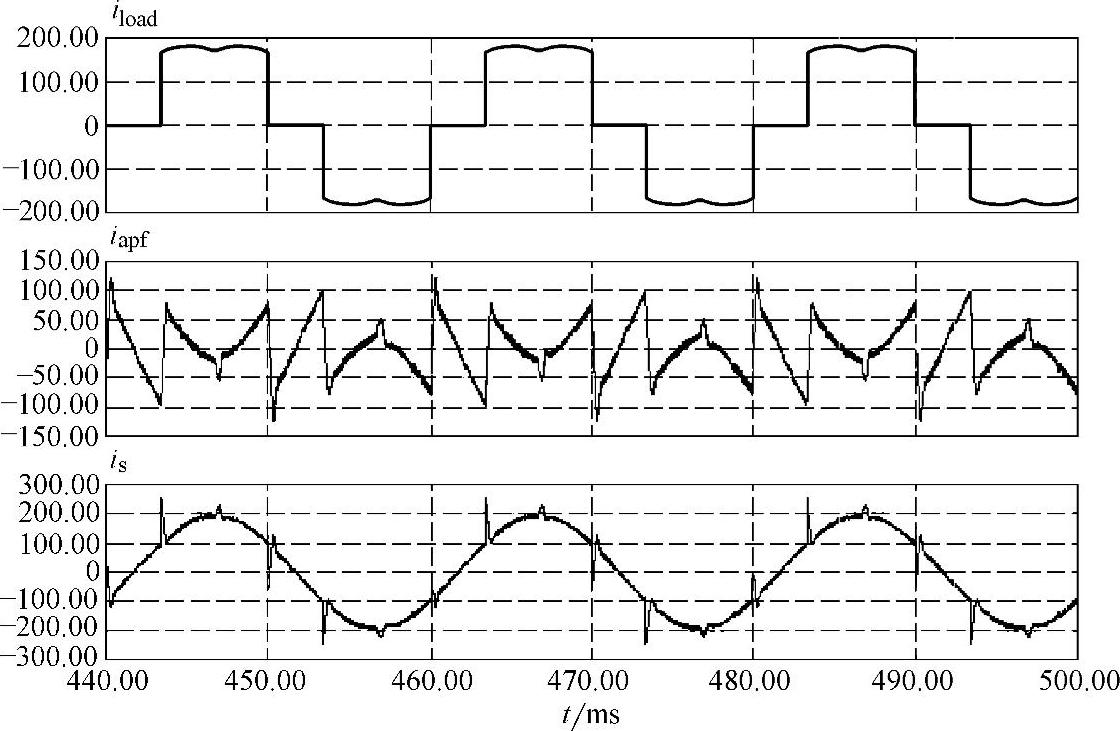
图5-23 三角载波调制方式的滤波效果
对上式作离散化处理,设离散系统的信号采样周期为Ts,则在(k+1)时刻,有:

由于预测电流控制方式下APF输出存在大约1个采样周期的延迟,并设控制效果良好,则可用(k+1)时刻实际补偿电流iapf(k+1)代替k时刻的指令电流iapf.ref(k)。于是,可以得到APF指令电压的计算原理,如图5-24所示,Ts为采样周期。
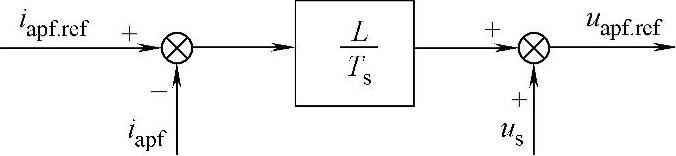
图5-24 电流指令到电压指令的转换
根据APF指令电压瞬时值,按照三角载波调制策略即可得到PWM控制信号,达到补偿负载谐波电流的目的。参考文献[10]详细分析了预测电流控制方法在电感参数变化时的稳定性和跟踪精度。图5-25给出预测电流控制方式的PSIM仿真逻辑,图5-26为20kHz载波频率下的仿真结果。
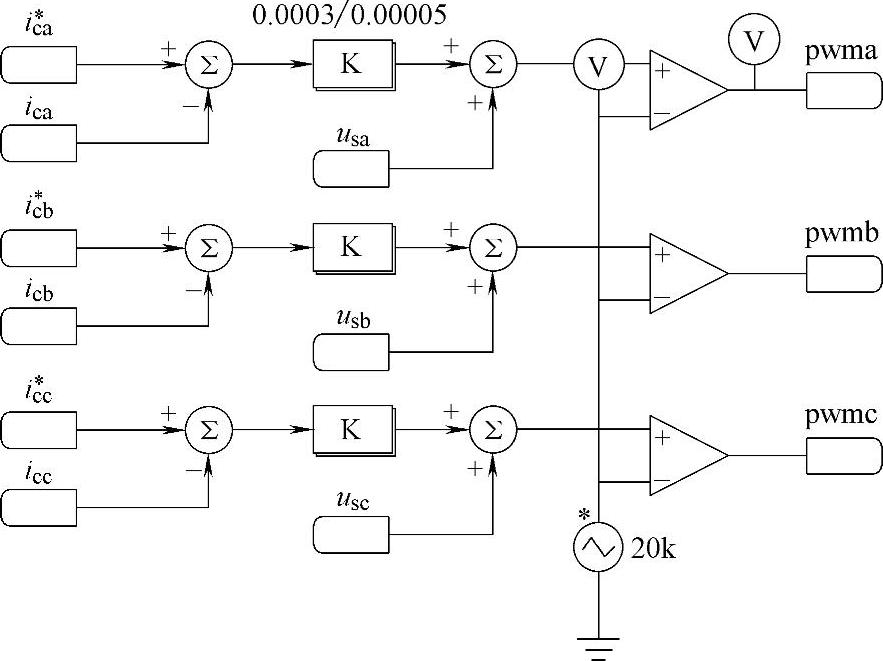
图5-25 预测电流控制的仿真逻辑
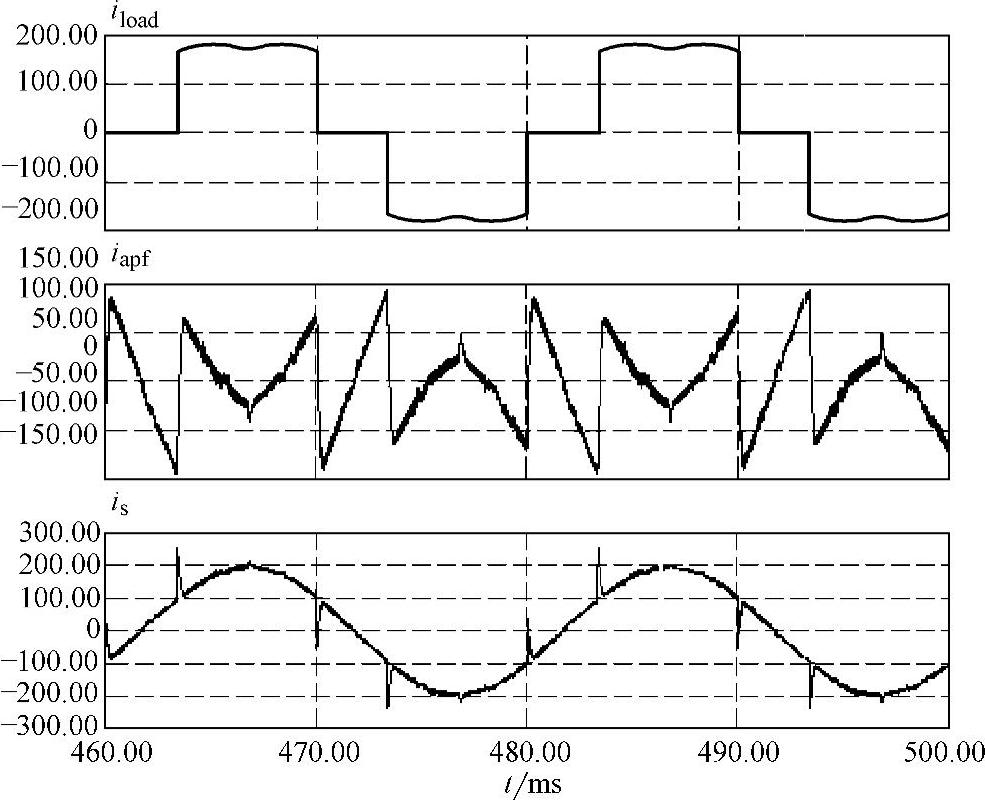
图5-26 预测电流控制方式的滤波效果
比较上述四种调制策略可以发现,滞环比较具有最快的实时跟踪速度和限定的跟踪误差,三角载波调制和预测电流控制具有相对较好的输出电流波形,但是跟踪速度稍慢。图5-27给出滞环比较和三角载波调制方式下对负载电流中29次谐波的滤波效果,可以看出,由于三角载波调制的微小延迟作用,谐波次数越高,滤波效果越差。对此,必要时可以在三角载波调制方式中加入超前校正环节。
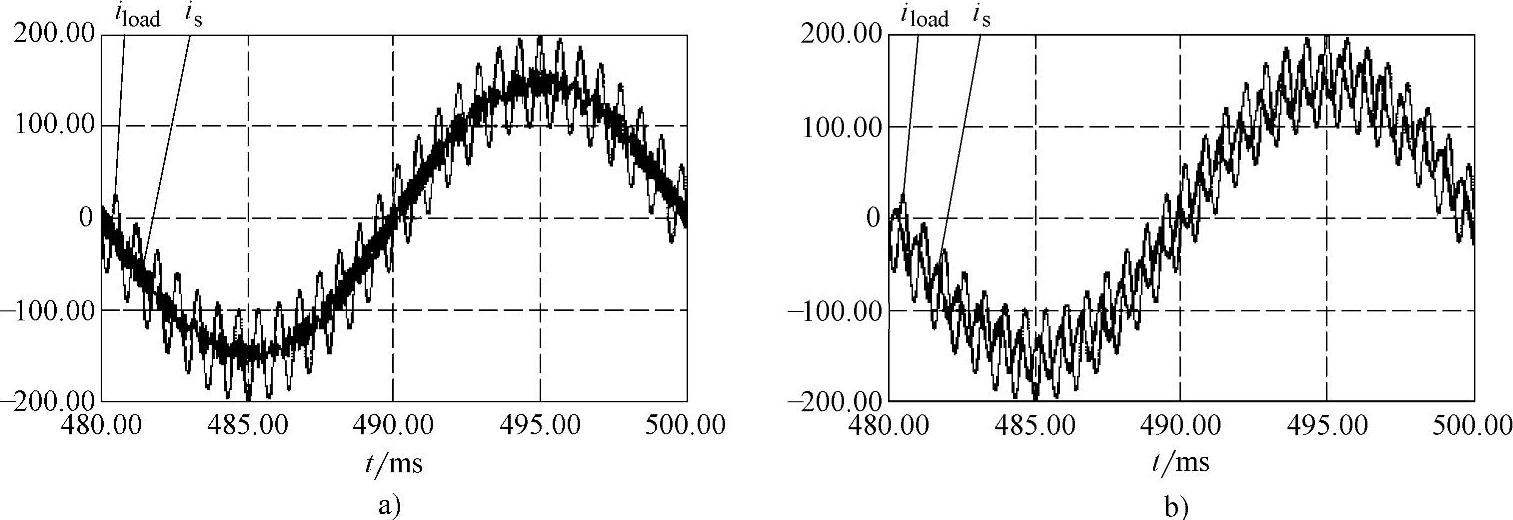
图5-27 APF在不同调制方式下对29次谐波的滤波效果比较
a)滞环比较调制 b)三角载波调制
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。