



自励单变量控制实际是一种脉冲幅度调制方式,由于调制深度恒定不变,在一个基波周期内,各个脉冲的宽度同比不变,无功功率的调节是通过直流电压随动变化来实现的,这种控制策略可用图3-17表示。
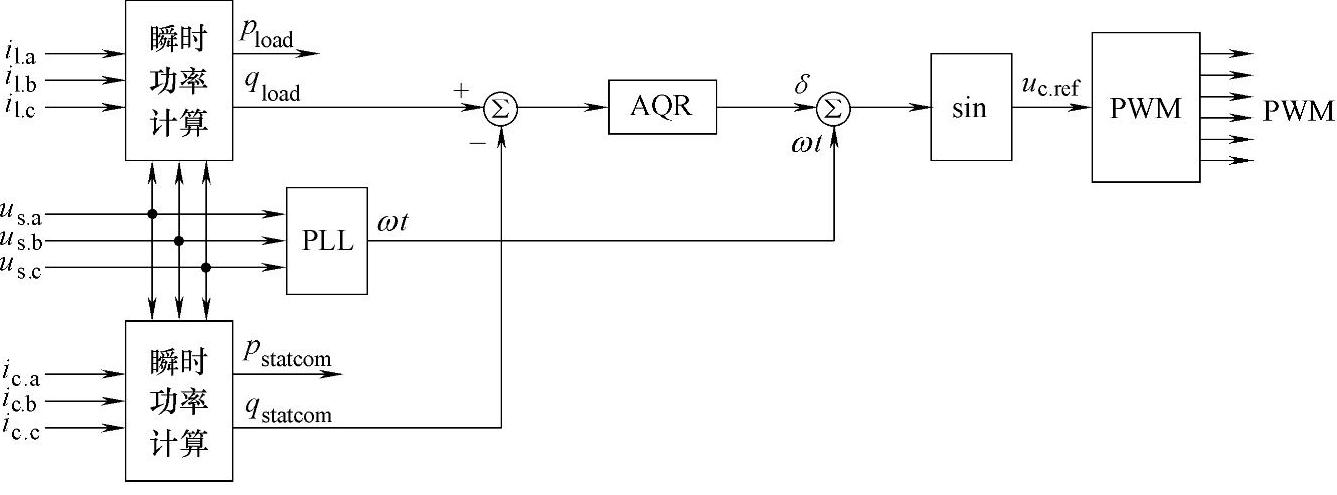
图3-17 基于控制角的自励单变量控制策略
图中,锁相环单元PLL用于提取电源电压的瞬时相位,瞬时功率计算单元分别求取即时负载无功功率和SVG发出的无功功率,根据无功功率误差的大小和方向,通过无功调节器AQR得到期望的控制角。由控制角查正弦函数表可以得到VSC的三相电压调制波形,进而由PWM产生单元生成PWM脉冲信号。PWM可以采用SPWM、SVPWM或优化PWM策略等。
无功功率调节器(AQR)可以采用不同的控制规律。近年来,学者提出了多种可应用于SVG的控制算法,如滑模变结构控制、无源性控制、非线性控制、神经元控制、模糊控制、自抗扰控制等。但是,由于电力系统参数的不可预见性和负载随机变化,要求应用于电力系统控制装置的控制算法具有很强的鲁棒性,因此工程实际中仍然以鲁棒性良好的PI控制规律为主。
根据式(3-32)所示的自励方式下SVG的数学模型,忽略PWM调制引入的微小开关延迟,可得无功电流对控制角的传递函数(略去由于无功方向定义而引入的负号):

整理可得

于是,无功功率对控制角的传递函数为

显然,式(3-40)是一个高阶系统。为了简化分析,可以根据SVG的实际情况进行化简和降阶处理。在SVG系统中,通常有如下关系:
L2C<<2RLC<<ω2L2C
R2C<<(ωL)2C因此,无功功率对控制角的传递函数可以简化为一个惯性系统:

式中(https://www.xing528.com)
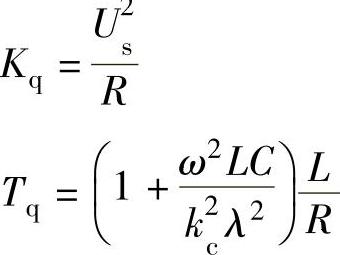
于是,可得图3-18所示的SVG自励单变量
控制系统简化框图。
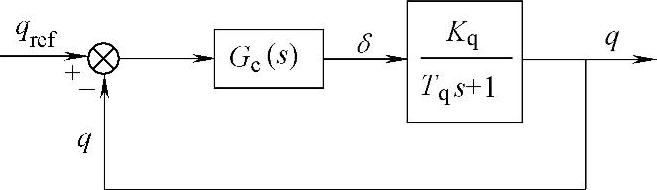
图3-18 SVG自励单变量控制系统简化框图
若调节器采用比例积分环节,则无功功率控制系统的开环传递函数为

如果取积分时间常数
τ=Tq/10 (3-43)
则无功功率控制系统可近似为一个典型I型系统。按照典型I型系统的二阶最佳整定方法:
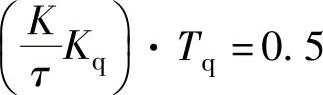
可得比例系数的计算公式:

按照上述校正方法,可以保证无功功率的幅频特性以-20dB/dec的斜率穿越零分贝线,使得系统稳定,但是穿越频率较低(ωc≈1/2Tq),系统响应速度较慢。因此,也可把PI调节器的零点设置在惯性环节的转折频率处,使系统的微分零点与积分极点相抵消,再按照穿越频率确定PI调节器的比例系数,详见下节仿真示例的具体分析。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。