



练习文件路径:\上机操作\结果文件\Ch08\阀门凸轮机构运动仿真.sldprt
演示视频路径:\视频\Ch08\阀门凸轮机构运动仿真.avi
01 打开本例素材文件【阀门凸轮机构.SLDASM】,如图8-87所示。
02 单击【运动算例1】标签,打开运动算例界面窗口。
03 在MotionManager工具栏运动算例类型列表中选择【Motion分析】算例。
04 接下来为阀门凸轮机构添加动力马达。将动画时间设置在1秒处,单击【马达】按钮 ,为凸轮添加旋转马达,如图8-88所示。
,为凸轮添加旋转马达,如图8-88所示。
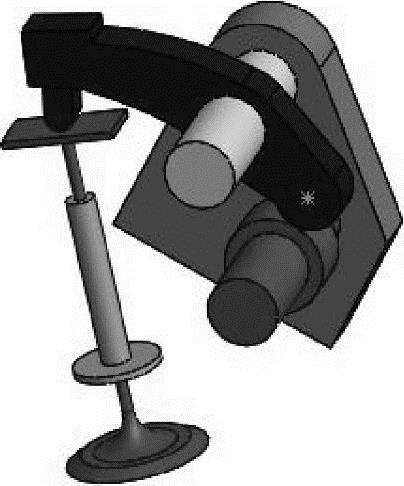
图8-87 阀门凸轮机构
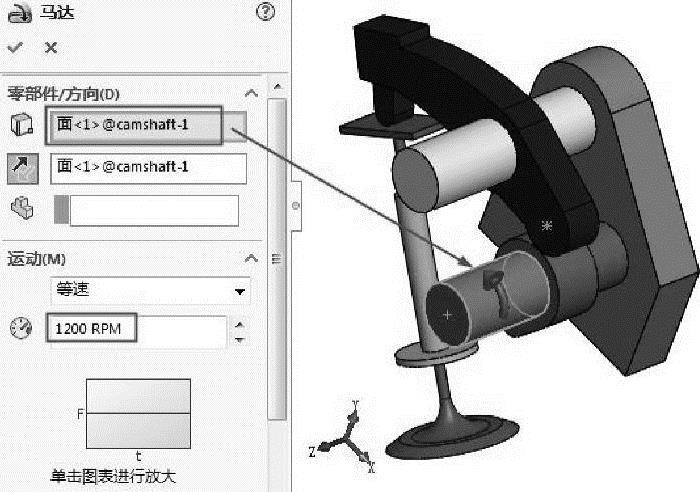
图8-88 添加凸轮的旋转马达
05 在凸轮接触的另一机构中需要添加压缩弹簧,以保证凸轮运动过程中时时接触。单击【弹簧】按钮 ,弹出【弹簧】属性面板,然后设置弹簧参数,如图8-89所示。
,弹出【弹簧】属性面板,然后设置弹簧参数,如图8-89所示。
06 接下来设置两个实体接触:一是凸轮接触,二是打杆与弹簧位置接触。单击【接触】按钮 ,在凸轮位置添加第一个实体接触,如图8-90所示。
,在凸轮位置添加第一个实体接触,如图8-90所示。
07 同理,添加弹簧端的实体接触,如图8-91所示。
08 单击【计算】按钮 ,计算运动算例,完成马达减速运动动画。单击【从头播放】按钮
,计算运动算例,完成马达减速运动动画。单击【从头播放】按钮 ,播放减速运动的仿真动画,如图8-92所示。
,播放减速运动的仿真动画,如图8-92所示。
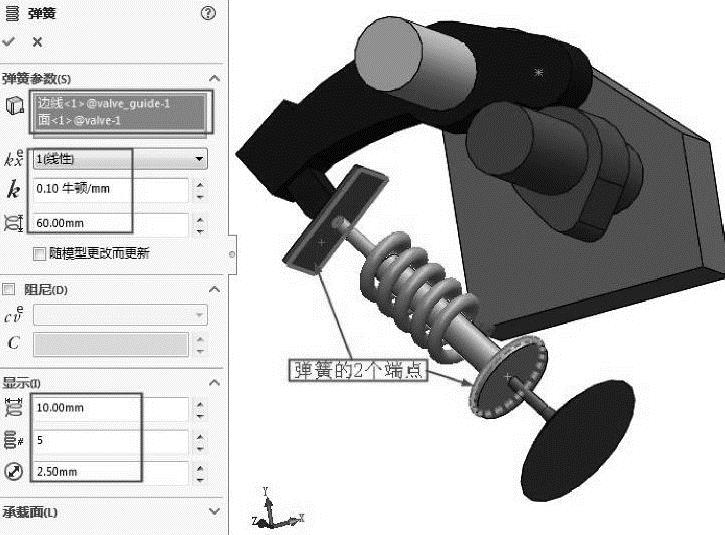
图8-89 添加线性弹簧
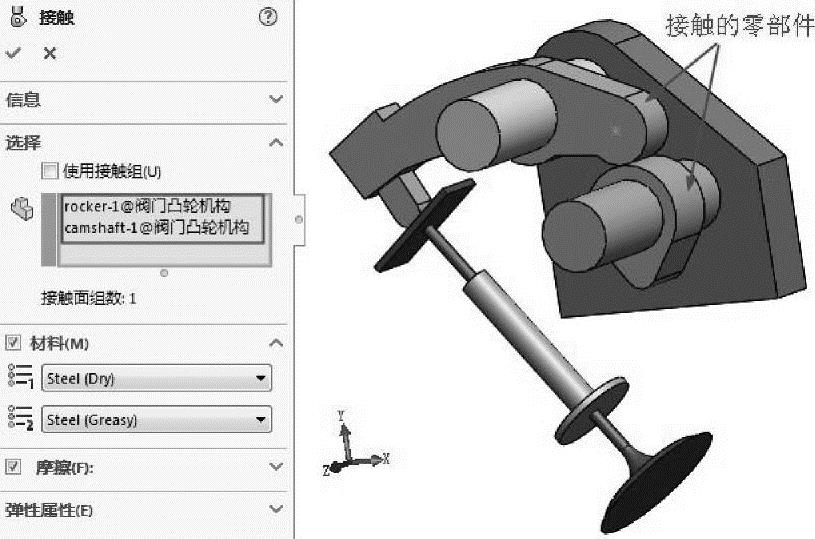
图8-90 添加凸轮接触
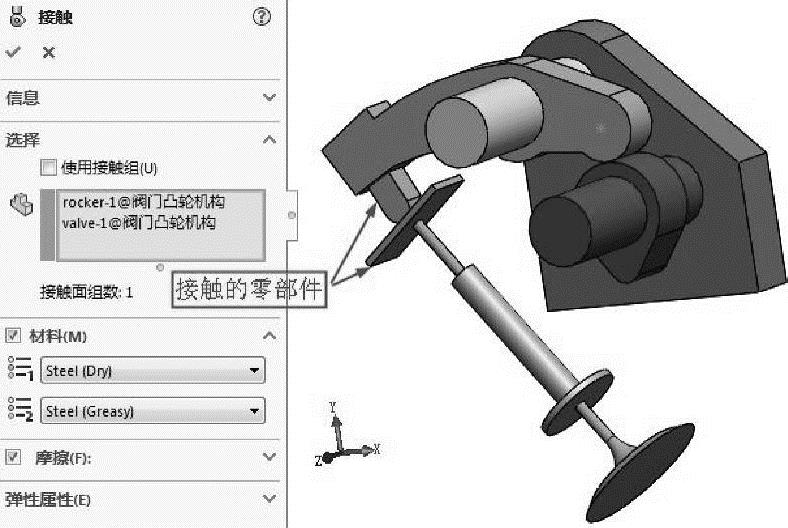
图8-91 添加弹簧端的实体接触
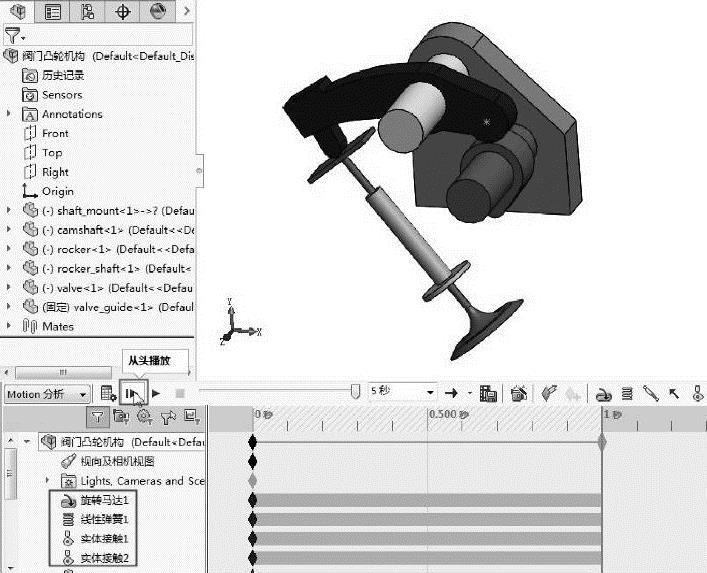
图8-92 创建运动动画并播放
09 单击【保存动画】按钮 ,保存减速运动的动画仿真视频文件。
,保存减速运动的动画仿真视频文件。
10 完成模型动力学的参数设置后,就可以进行仿真分析了。单击MotionManager工具栏的【运动算例属性】按钮 ,打开【运输算例属性】面板。然后设置运动算例属性参数,如图8-93所示。
,打开【运输算例属性】面板。然后设置运动算例属性参数,如图8-93所示。
11 将时间栏拖到0.1秒位置,并单击右下角的【放大】按钮 ,如图8-94所示。然后从头播放动画。
,如图8-94所示。然后从头播放动画。
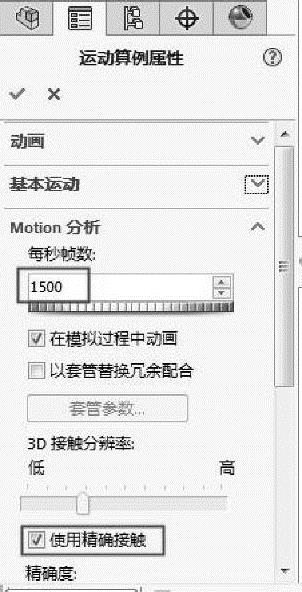
图8-93 设置运动算例属性
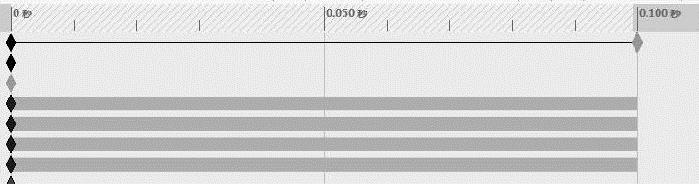
图8-94 更改动画时间(https://www.xing528.com)
12 修改播放时间为5秒,重新单击【计算】按钮〛 ,生成新的动画,如图8-95所示。
,生成新的动画,如图8-95所示。

图8-95 重新计算动画时间
13 单击【结果和图解】按钮 ,打开【结果】属性面板。在【选取类型】列表中选择【力】类型,选择子类型为【接触力】,选择结果分量为【幅值】,然后选择凸轮接触部位的两个面作为接触面,如图8-96所示。
,打开【结果】属性面板。在【选取类型】列表中选择【力】类型,选择子类型为【接触力】,选择结果分量为【幅值】,然后选择凸轮接触部位的两个面作为接触面,如图8-96所示。
14 单击属性面板中的【确定】按钮 ,生成运动算例图解,如图8-97所示。
,生成运动算例图解,如图8-97所示。

图8-96 设置【结果和图解】属性
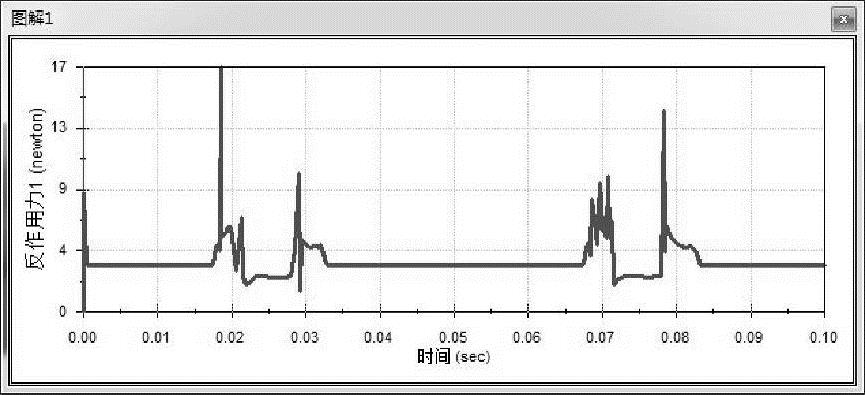
图8-97 生成图解
15 通过图解表,可以看出0.02s、0.08s位置的曲线振荡幅度较大,如果不调整,长久会对凸轮机构的使用寿命造成破坏。需要重新对运动仿真的参数进行修改。
16 在软件窗口底部的【运动算例1】标签单击右键,选择快捷菜单中的【复制算例】命令,将运动算例整个项目复制,如图8-98所示。
17 在复制的运动算例中,编辑【旋转马达2】,如图8-99所示。
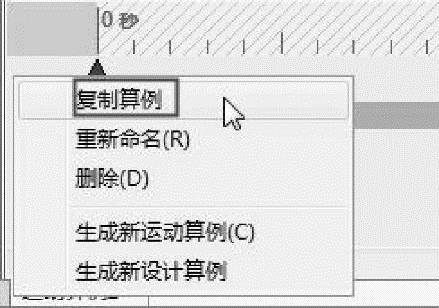
图8-98 复制算例
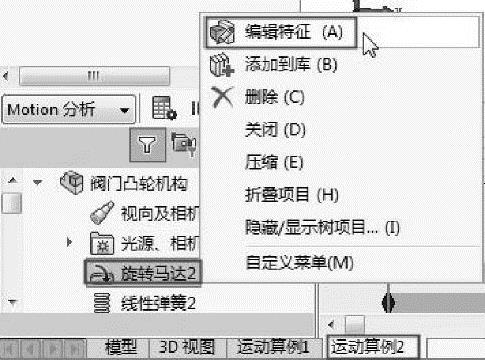
图8-99 编辑【旋转马达2】
18 更改马达的转速为2000rpm,如图8-100所示。
19 更改弹簧。鉴于弹簧的强度不够会导致运动过程中接触力不足,所以按照修改马达参数的方法修改弹簧常数为10牛顿/mm,如图8-101所示。
20 更改马达转速和弹簧常数后,再单击【计算】按钮 ,重新仿真分析计算。
,重新仿真分析计算。
21 在MotionManager设计树中的【结果】项目中右键单击【图解2<反作用力2>】,选择快捷菜单中的【显示图解】命令,查看新的运动仿真图解,如图8-102所示。
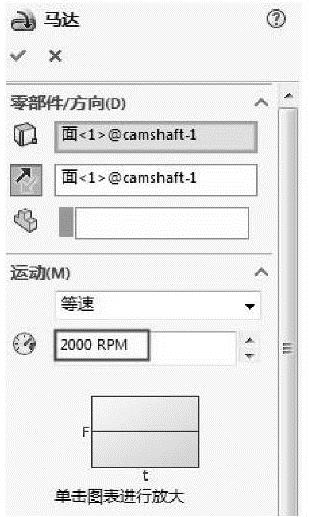
图8-100 修改马达转速

图8-101 更改弹簧常数
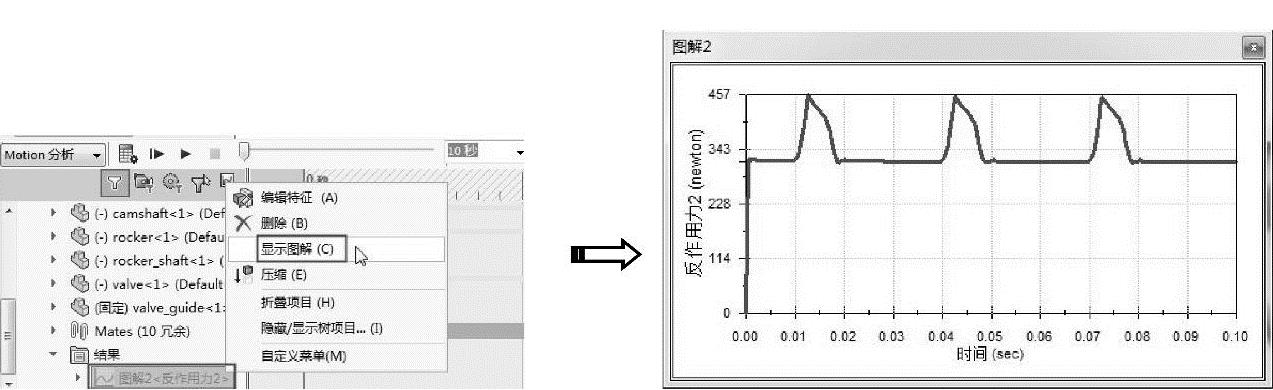
图8-102 显示新的运动仿真图解
22 从新的图解表中可以看到,运动曲线的振动幅度变小了,较为平缓,说明运动过程中的力度比较稳定。
23 最后保存动画,并保存结果文件。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。