



练习文件路径:\上机操作\结果文件\Ch08\连杆机构运动仿真.sldprt
演示视频路径:\视频\Ch08\连杆机构运动仿真.avi
本例的四连杆机构的建模与装配工作已经完成,下面仅介绍其运动仿真过程。
01 打开本例素材文件【四连杆.SLDASM】,如图8-56所示。
02 在软件窗口底部单击【运动算例1】标签,打开运动算例界面。
03 在MotionManager工具栏运动算例类型列表中选择【基本运动】算例,如图8-57所示。
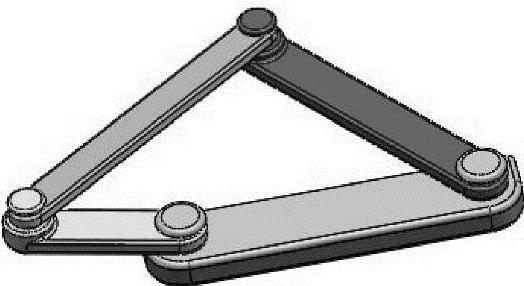
图8-56 四连杆机构
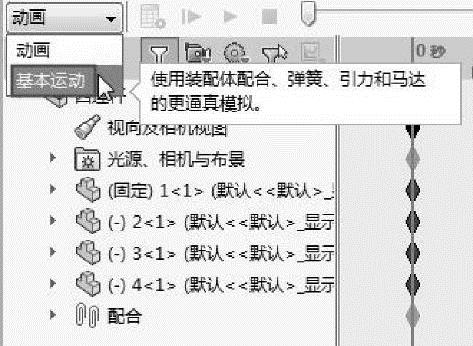
图8-57 选择基本运动算例
04 拖动键码点到8秒位置,如图8-58所示。
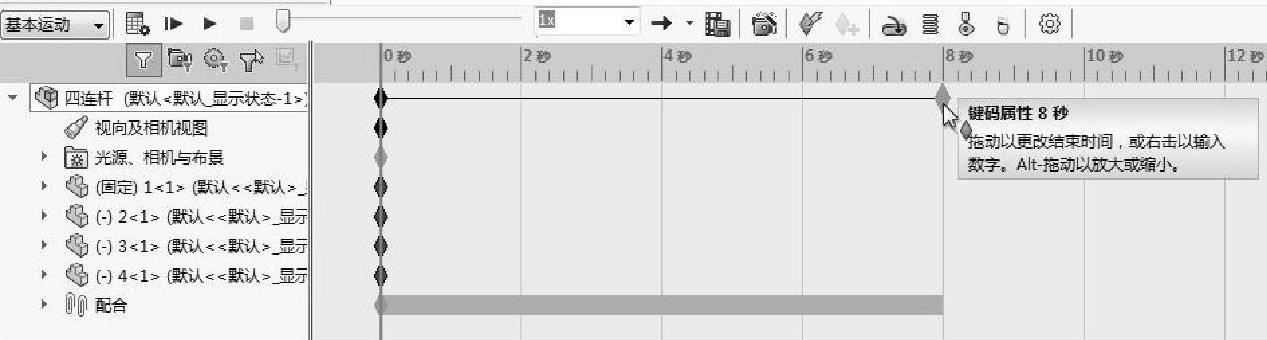
图8-58 设置键码点
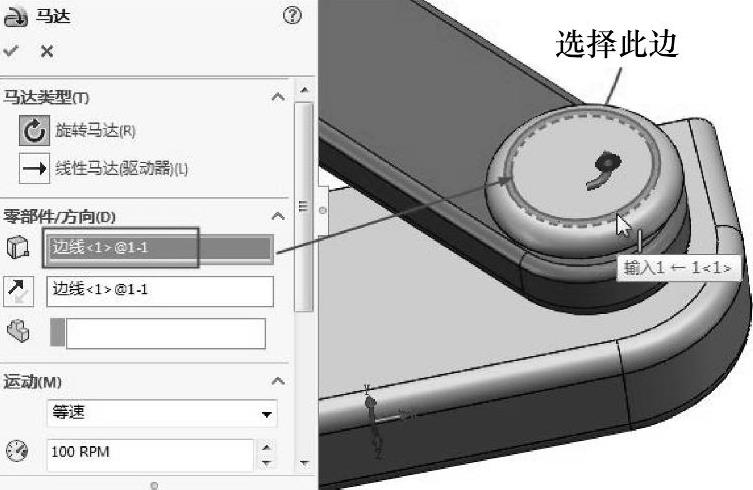
05 在MotionManager工具栏单击【马达】按钮 ,打开【马达】属性面板。选择【旋转马达】马达类型,首先选择马达位置,如图8-59所示。
,打开【马达】属性面板。选择【旋转马达】马达类型,首先选择马达位置,如图8-59所示。
技巧点拨
选择参考可以是边线,也可以是面。放置马达后,注意马达运动的方向箭头,后面的几个马达运动方向必须与此方向一致。
06 接着选择要运动的对象,选择编号为3的连杆部件(紫色),如图8-60所示。单击属性面板中的【确定】按钮 ,完成马达的添加。
,完成马达的添加。
 (https://www.xing528.com)
(https://www.xing528.com)
图8-59 制定马达位置(选择圆形边线)
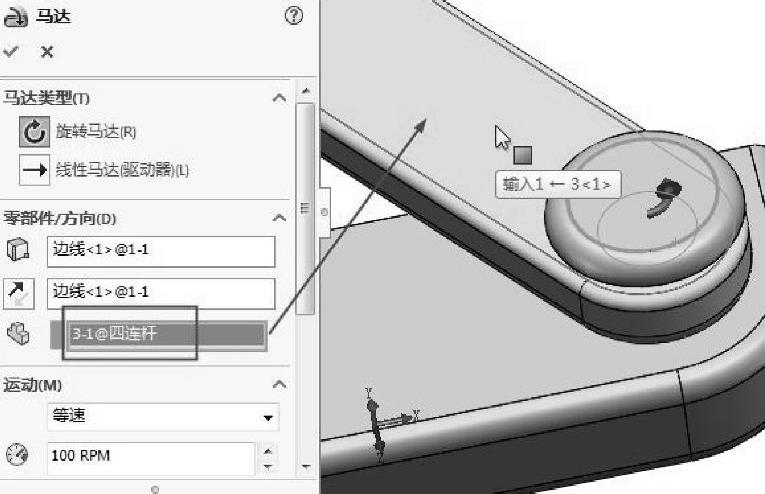
图8-60 选择要运动的部件
07 同理,创建第2个马达(在连杆3和连杆4之间),如图8-61所示。
08 在连杆1和连杆2之间创建第3个马达,如图8-62所示。
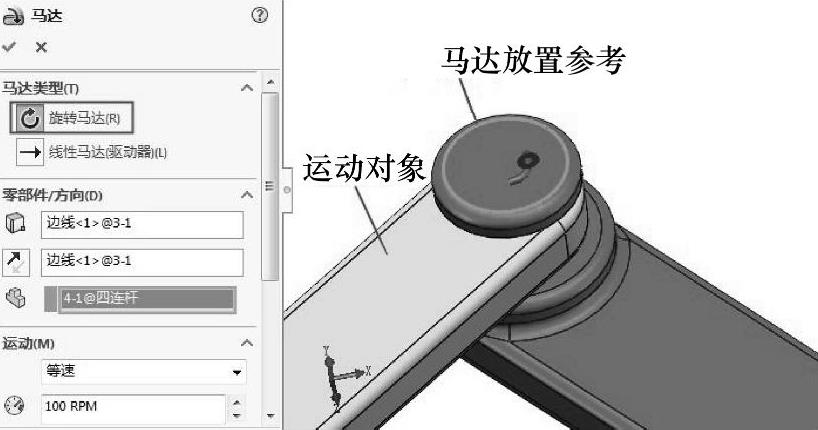
图8-61 创建第2个马达
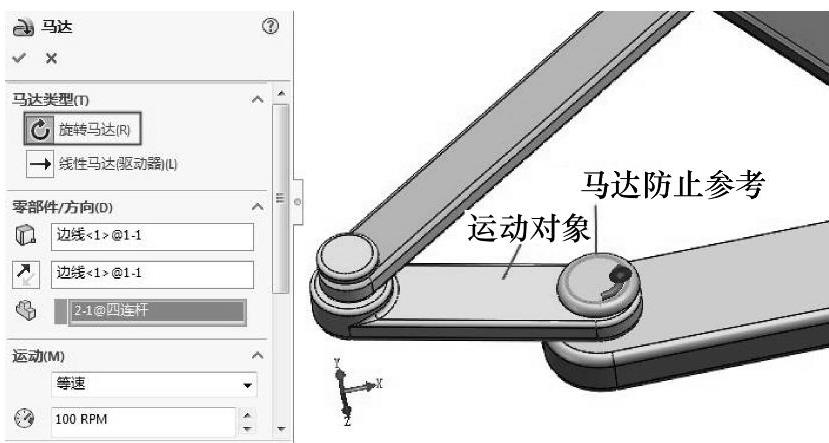
图8-62 创建第3个马达
09 在连杆2和连杆4之间创建第4个马达,如图8-63所示。
10 单击【计算】按钮 。计算运动算例,完成马达运动动画。单击【从头播放】按钮
。计算运动算例,完成马达运动动画。单击【从头播放】按钮 ,播放马达运动仿真动画。如图8-64所示。
,播放马达运动仿真动画。如图8-64所示。
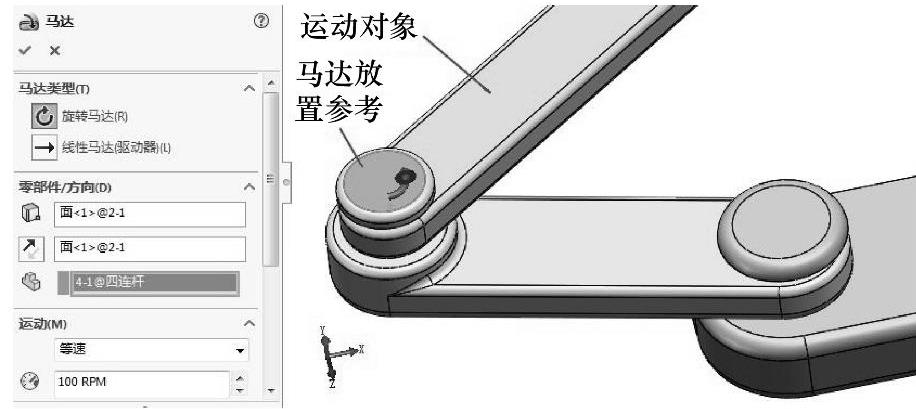
图8-63 创建第4个马达
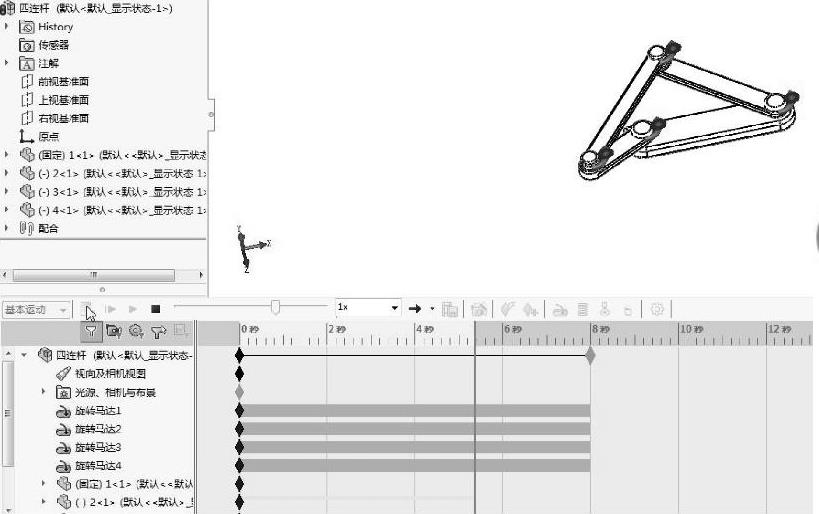
图8-64 创建并播放动画
技巧点拨
如果添加马达后,发现时间轨上有部分时间红色显示,表示该段时间并没有运动,可以将拖动键码点放回黄色区域,重新计算后,再播放。最后将键码点移动到原时间栏上,再播放即可。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。