



连杆机构常根据其所含构件数目的多少而命名,如四杆机构、五杆机构等。其中平面四杆机构不仅应用特别广泛,而且是多杆机构的基础,所以本节将重点讨论平面四杆机构的有关基本知识,并对其进行运动仿真研究。
机构有平面机构与空间机构之分。
●平面机构:各构件的相对运动平面互相平行(常用的机构大多数为平面机构)。
●空间机构:至少有两个构件能在三维空间中相对运动。
1.平面连杆机构
平面连杆机构就是用低副连接而成的平面机构,其特点如下。
●运动副为低副,面接触。
●承载能力大。
●便于润滑,寿命长。
●几何形状简单——便于加工,成本低。
下面介绍几种常见的连杆机构。
(1)铰链四杆机构
铰链四杆机构是平面四杆机构的基本形式,其他形式的四杆机构均可以看作是此机构的演化。图8-47为铰链四杆机构示意图。
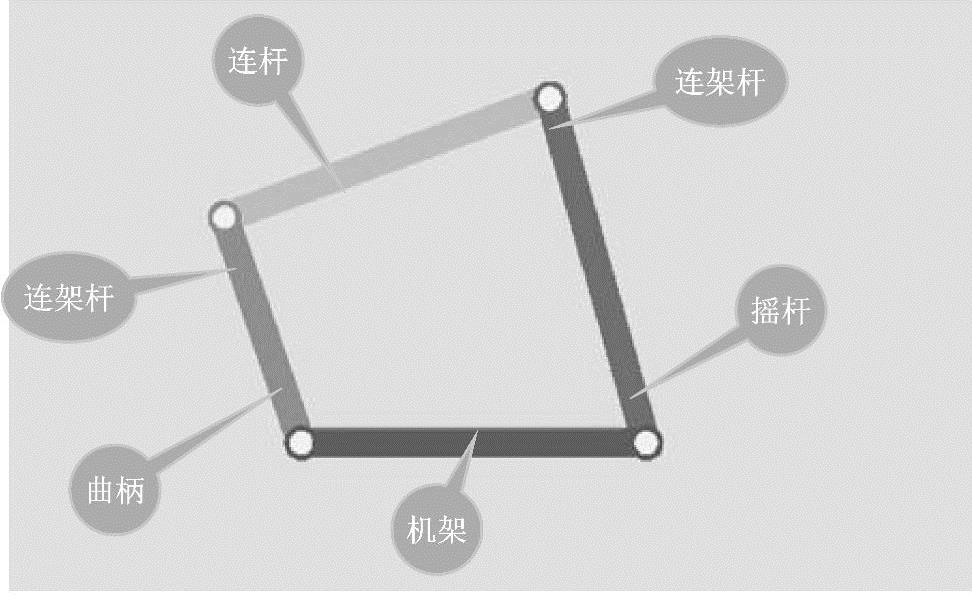
图8-47 铰链四杆机构
铰链四杆机构根据其两连架杆的不同运动情况,可以分为以下3种类型。
●曲柄摇杆机构:铰链四杆机构的两个连架杆中,若其中一个为曲柄,另一个为摇杆,则称其为曲柄摇杆机构。当以曲柄为原动件时,可将曲柄的连续转动转变为摇杆的往复摆动,如图8-48所示。
●双摇杆机构:若铰链四杆机构中的两个连架杆都是摇杆,则称其为双摇杆机构,如图8-49所示。
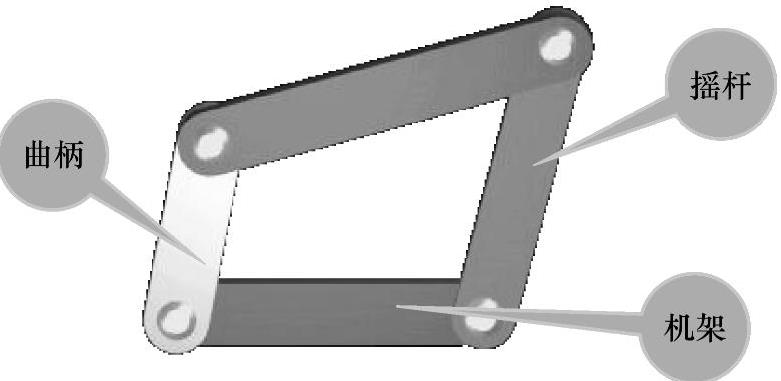
图8-48 曲柄摇杆机构
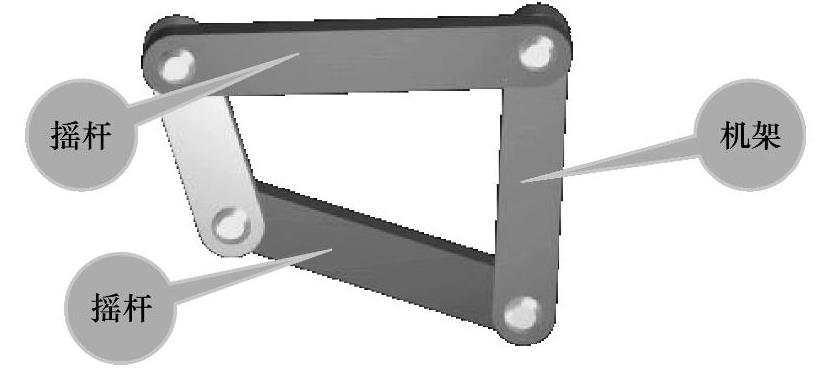
图8-49 双摇杆机构
技巧点拨
铰链四杆机构中,与机架相连的构件成为曲柄的条件如下。最短杆长度+最长杆长度≤其他两杆长度之和(杆长条件)机架长度-被考察的连架杆长度≥连杆长度-另1连架杆长度
上述的条件表明,如果铰链四杆机构满足杆长条件,则最短杆两端的转动副均为周转副。此时,若取最短杆为机架,则可得到双曲柄机构;若取最短杆相邻的构件为机架,则得到曲柄摇杆机构;若取最短杆的对边为机架,则得到双摇杆机构。
如果铰链四杆机构不满足杆长条件,则以任意杆为机架得到的都是双摇杆机构。
●双曲柄机构:若铰链四杆机构中的两个连架杆均为曲柄,则称其为双曲柄机构。在双曲柄机构中,若相对两杆平行且长度相等,则称其为平行四边形机构。它的运动有两个显著特征:一是两曲柄以相同速度同向转动;二是连杆作平动。这两个特性在机械工程上都得到了广泛应用,如图8-50所示。(https://www.xing528.com)

图8-50 双曲柄机构
(2)其他演变机构
其他由铰链四杆机构演变而来的机构还包括常见的曲柄滑块机构、导杆机构、摇块机构和定块机构、双滑块机构、偏心轮机构、天平机构及牛头刨床机构等。
组成移动副的两活动构件,画成杆状的构件称为导杆,画成块状的构件称为滑块。图8-51为曲面滑块机构。
导杆机构、摇块机构和定块机构是在曲柄滑块基础上分别固定不同对象而演变出来的新机构,如图8-52所示。
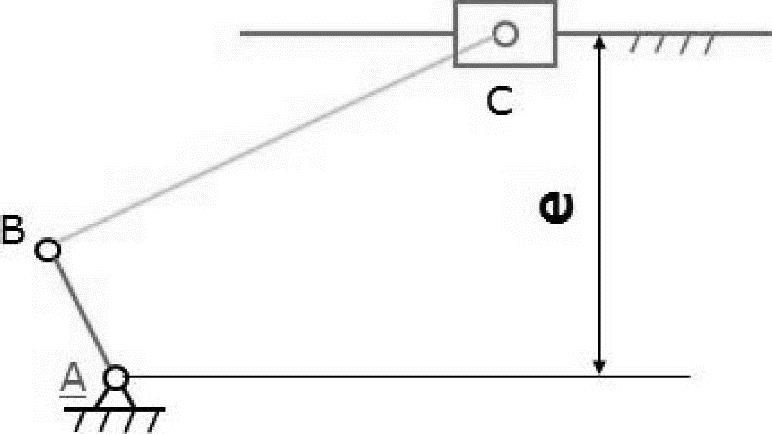
图8-51 曲面滑块机构

图8-52 导杆机构、摇块机构和定块机构
2.空间连杆机构
在连杆机构中,若各构件不都在相互平行的平面内运动,则称其为空间连杆机构。空间连杆机构从动件的运动可以是空间的任意位置。机构紧凑、运动多样、灵活可靠。
(1)常用运动副
组成空间连杆机构的运动副除转动副R和移动副P外,还有球面副S、球销副S'、圆柱副C及螺旋副H等。在科学研究和实际应用中,常以机构中所含运动副的代表符号来命名各种空间连杆机构,如图8-53所示。

图8-53 常见运动副
(2)万向联轴节
万向联轴节可传递两相交轴的动力和运动,而且在传动过程中两轴之间的夹角可变。图8-54为万向联轴节的结构示意图。
万向联轴节分单向和双向两种。
●单向万向联轴节:输入输出轴之间的夹角180-α,特殊的球面四杆机构。主动轴匀速转动,从动轴作变速转动。随着α的增大,从动轴的速度波动也增大,在传动中将引起附加的动载荷,使轴产生振动。为消除这一缺点,通常采用双向万向联轴节。
●双向万向联轴节:1个中间轴和两个单万向联轴节。中间轴采用滑键连接,允许轴向距离有变动,如图8-55所示。
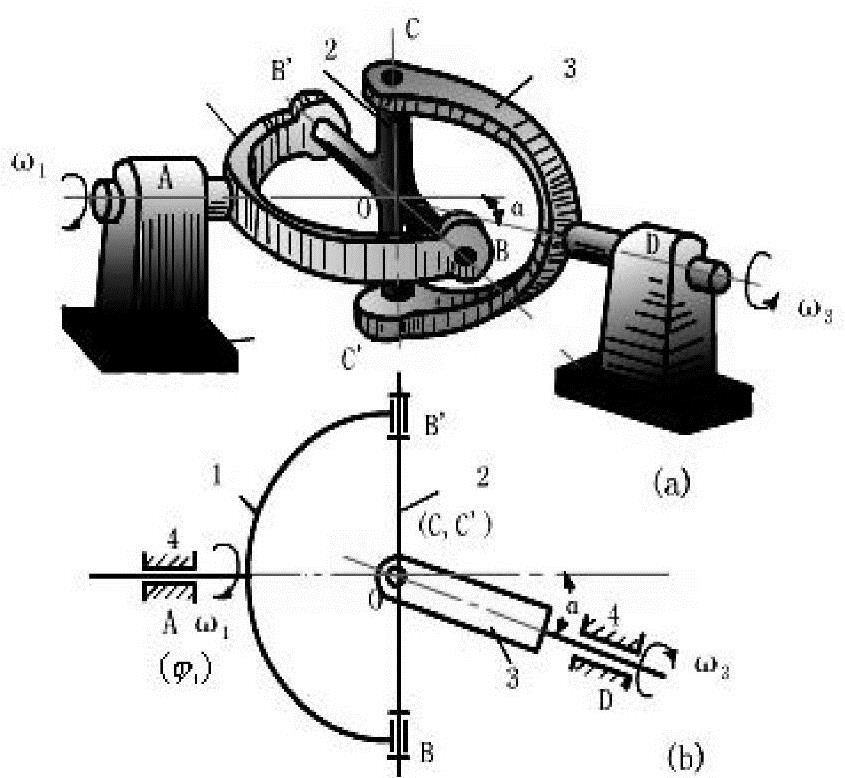
图8-54 万向联轴节结构示意图
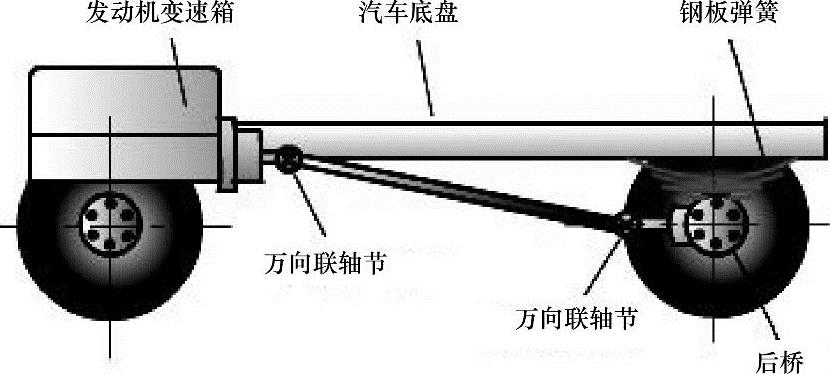
图8-55 双向万向联轴节
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。