



(1)凸轮角速度ω1

(2)转盘分度数I(转盘每转一周中的停歇次数) 对于如图11-8所示的双头型(凸轮头数H=2)共轭平面分度凸轮机构,转盘分度数通常可取3、4、5、6、8(按照工作机械要求的工位数选取)。
(3)凸轮头数H 通常可取1、2、3、4,头数少的凸轮形状比较简单,但是受到凸轮轮廓的组合条件、压力角条件和不根切条件等限制时,可以取凸轮头数H=3或4。
(4)转盘滚子数z(包括转盘的前后两个端面上的滚子)
z=HI (11-8)
(5)凸轮分度期转角θf和停歇期转角θd 对于双头型共轭平面分度凸轮机构的凸轮,分度期转角通常可取θf=90°~270°(间隔为30°)。凸轮停歇期转角

(6)转盘分度期转位角φf

(7)转盘分度期运动规律 普通的正弦运动规律的始、末区段,从动件运动速度变化相当缓慢,导致中间区段的类速度幅度偏大。为改善这种情况,在始、末区段采用与中间区段不同周期的正弦运动规律(凸轮始、末区段对应的凸轮转角各占整个转角的1/8),即改进的正弦运动规律——组合摆线运动规律,如图11-9所示。它适用于中高速重载荷。
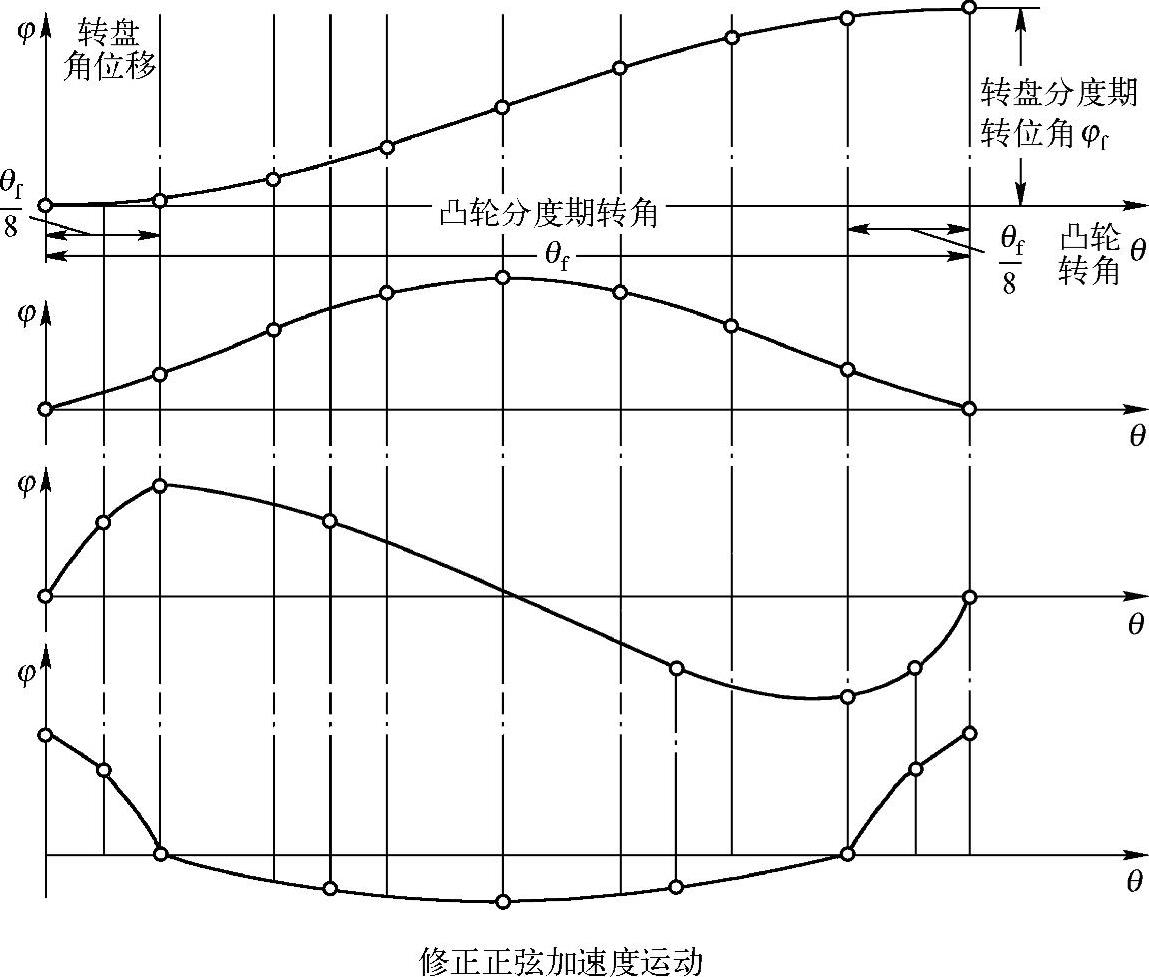
图11-9 组合摆线运动线图
组合摆线的运动规律特征是:
1)速度因数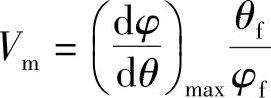 。对于非平底形式的从动件,它影响机构的压力角。
。对于非平底形式的从动件,它影响机构的压力角。
2)加速度因数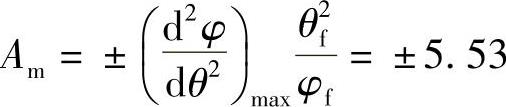 。它影响凸轮机构的接触应力。(https://www.xing528.com)
。它影响凸轮机构的接触应力。(https://www.xing528.com)
3)跃动因数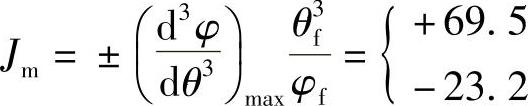 。它表示从动件系统惯性系统的变化率。
。它表示从动件系统惯性系统的变化率。
4)惯性矩因数 。它是基于负荷惯性的关于凸轮轴转矩的变量,电动机的峰值动力与它有关。
。它是基于负荷惯性的关于凸轮轴转矩的变量,电动机的峰值动力与它有关。
上述各式中,φ(°)是转盘角位移,φf(°)是转盘分度期转位角;θ(°)是凸轮转角,θf(°)是凸轮分度期转角。
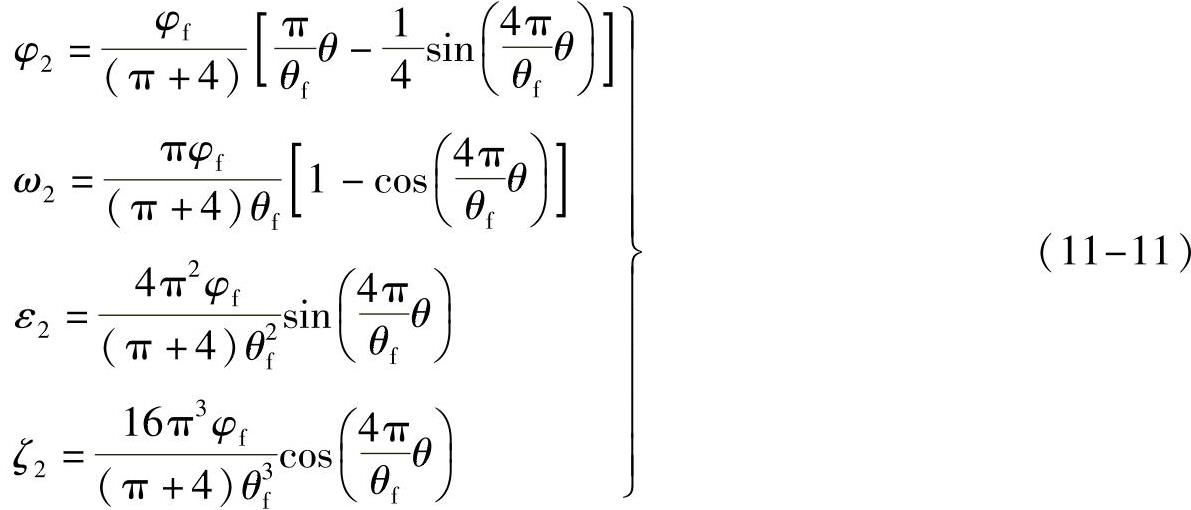
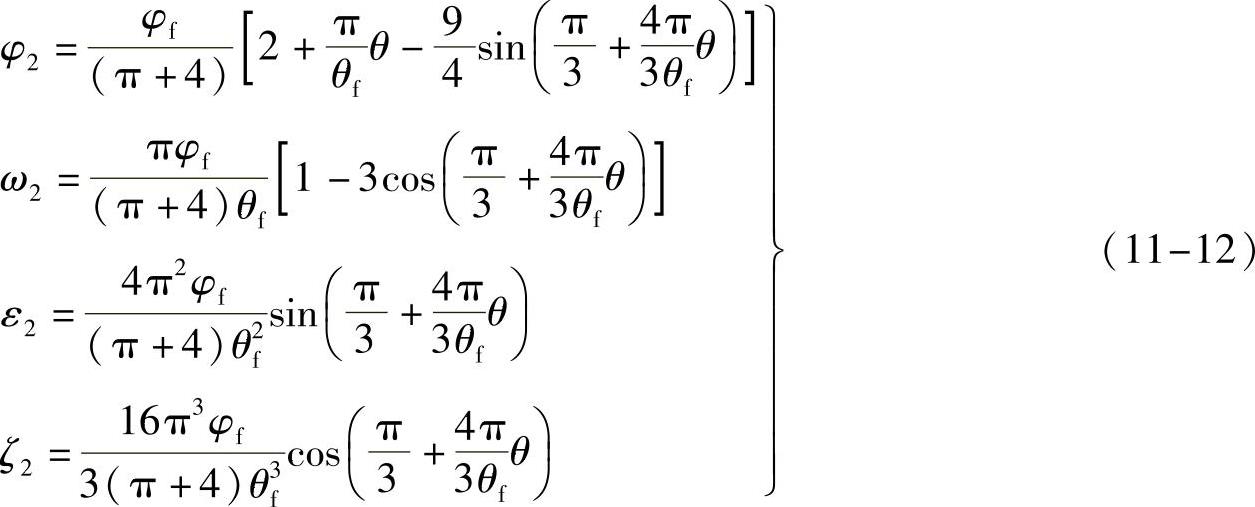
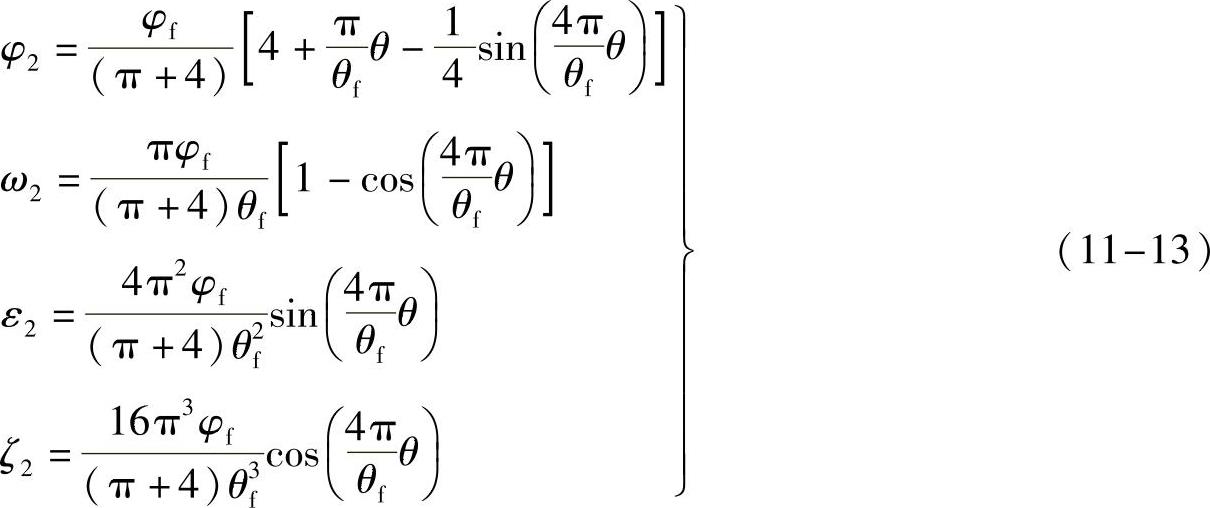
(8)转盘分度期的运动分析 在组合摆线运动三个区段的类角位移、类角速度、类角加速度和跃度为
1)当凸轮角位移0°≤θ≤22.5°时的开始区段
2)当凸轮角位移22.5°≤θ≤157.5°时的中间区段
3)当凸轮角位移157.5°≤θ≤180°时的末尾区段
(9)机构在分度期的角速度比(ω2/ω1)和类角加速度(ε2/ω21)根据式(11-11)~式(11-13)各式中间的两式,分别除以ω1或ω21,得到角速度比(ω2/ω1)和类角加速度(ε2/ω21)。
(10)机构动停比K和运动系数τ机构分度期时间tf/s和停歇期时间td/s

机构动停比和运动系数

免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。