



例9-8 已知偏置曲柄滑块机构的有关参数:滑块行程SC=800mm,曲柄轴心到滑块销心最远的水平距离P=1200mm,偏心距E=30mm,长度比 ,曲柄长度R、连杆长度L和偏心距E的偏差△R=0.06、△L=0.12和△E=0.01,曲柄转速n=60r/min。试确定曲柄长度R、连杆长度L和偏心距尺度系数
,曲柄长度R、连杆长度L和偏心距E的偏差△R=0.06、△L=0.12和△E=0.01,曲柄转速n=60r/min。试确定曲柄长度R、连杆长度L和偏心距尺度系数 ,并且绘制计算在曲柄一个运动周期(转角θ=0°~360°)时滑块的位移s、速度v和加速度a的均值及其偏差的线图。
,并且绘制计算在曲柄一个运动周期(转角θ=0°~360°)时滑块的位移s、速度v和加速度a的均值及其偏差的线图。
1)计算连杆长度和曲柄长度

R=λL=0.2×501.404278=100.280856mm
2)按照式(9-32),计算机构尺度参数影响系数的标准离差


3)编制M文件和运算结果。
M文件运算结果:
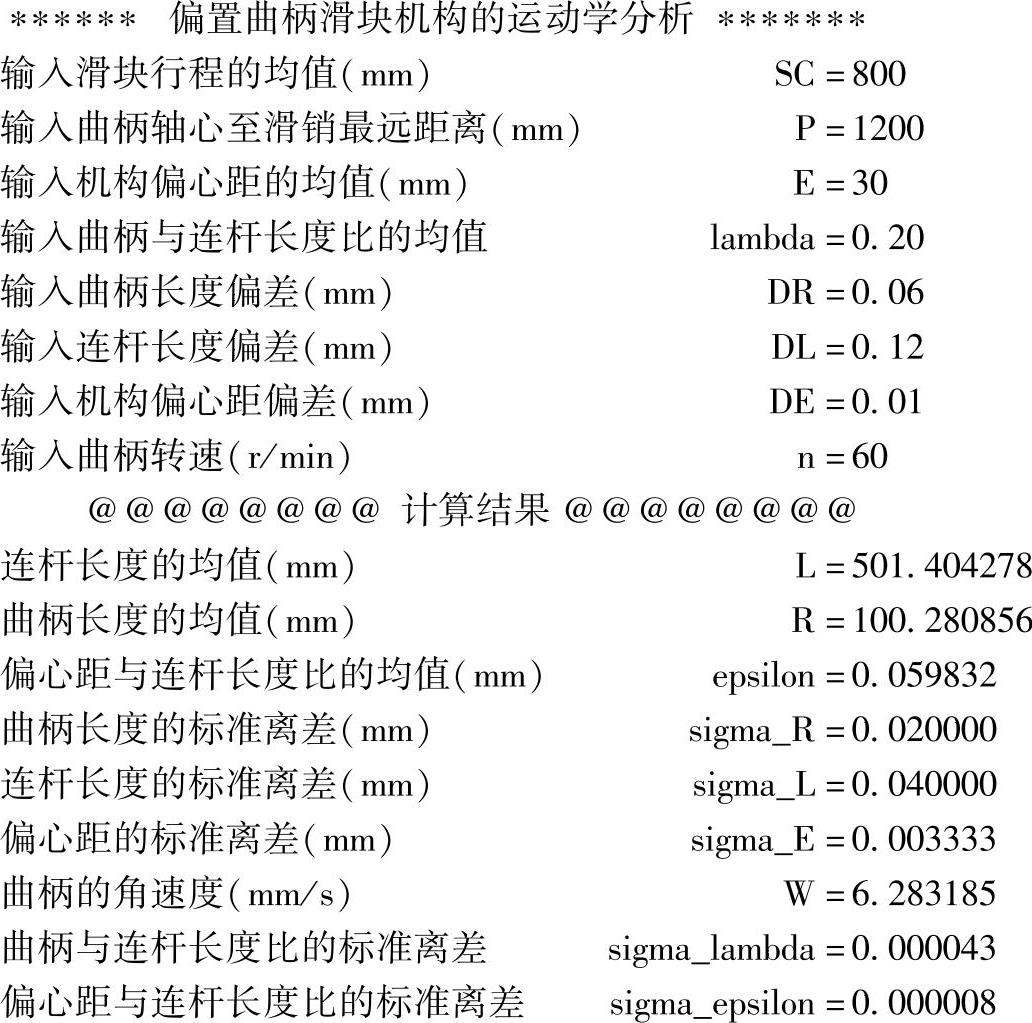
绘制的偏置曲柄滑块机构的运动分析线图如图9-18所示。
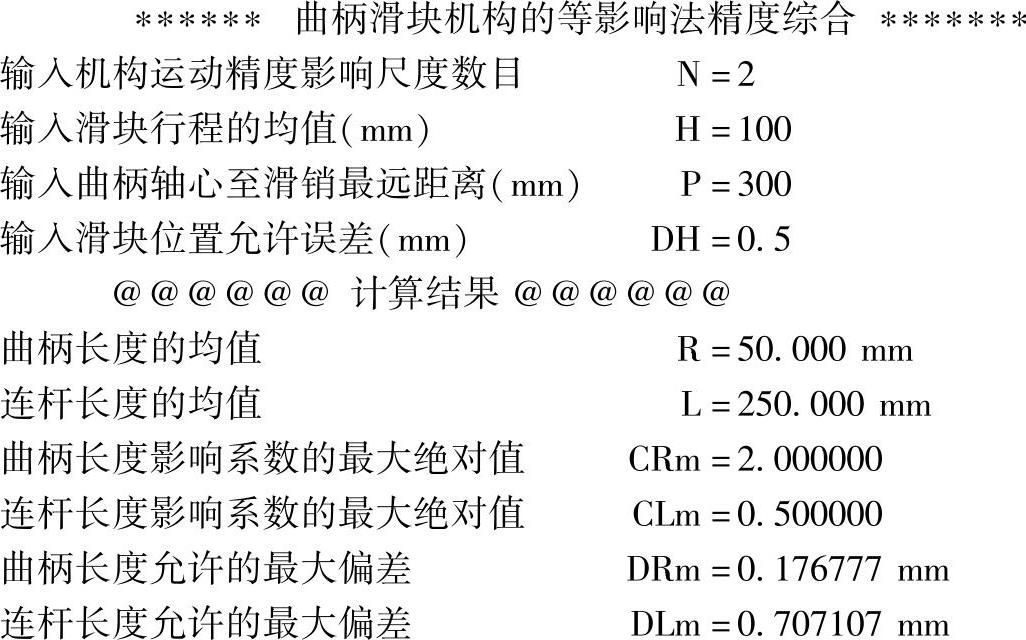
例9-9 已知对心曲柄滑块机构的有关参数:曲柄轴心到滑块销心最远距离P=300mm,滑块行程H=100mm,滑块位置允许误差σH=±0.5mm。试计算曲柄长度R和连杆长度L,及其允许的最大偏差△R和△L。
1)计算曲柄长度和连杆长度

L=P-R=300-50=250mm
2)计算机构尺度参数影响系数,即滑块位移函数h(R,L)关于曲柄长度R和连杆长度L的偏导数。由于滑块销心P点的位移函数

则关于曲柄长度R和连杆长度L的偏导数为(https://www.xing528.com)
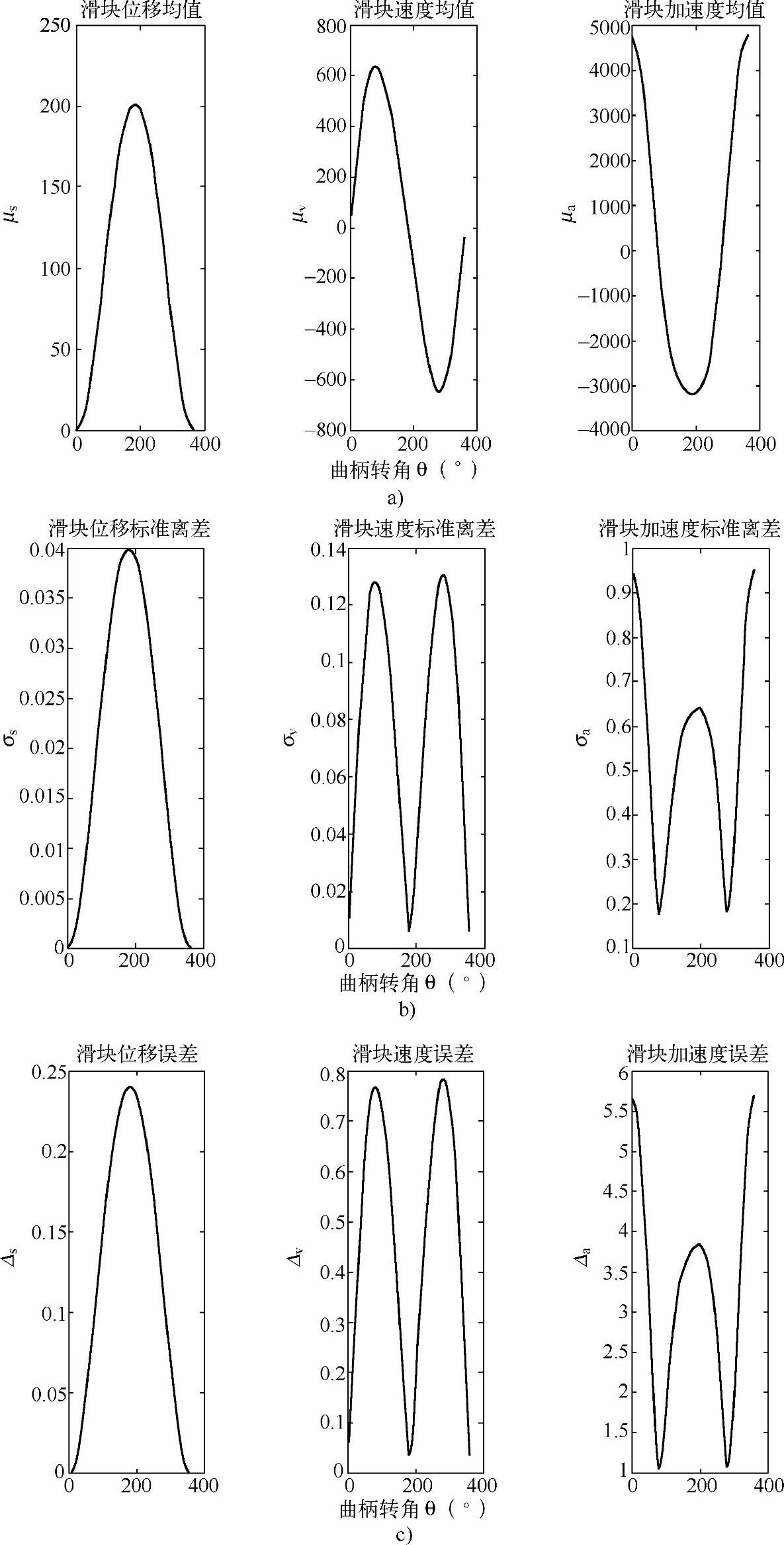
图9-18 偏置曲柄滑块机构的运动分析
a)滑块运动参数的均值 b)滑块运动参数的标准离差 c)滑块运动参数的误差
取输入参数θj(j=1°,2°,…,360°)时,绝对值最大的偏导数值为 。
。
3)计算曲柄和连杆允许的最大偏差


4)编制M文件和运算结果:
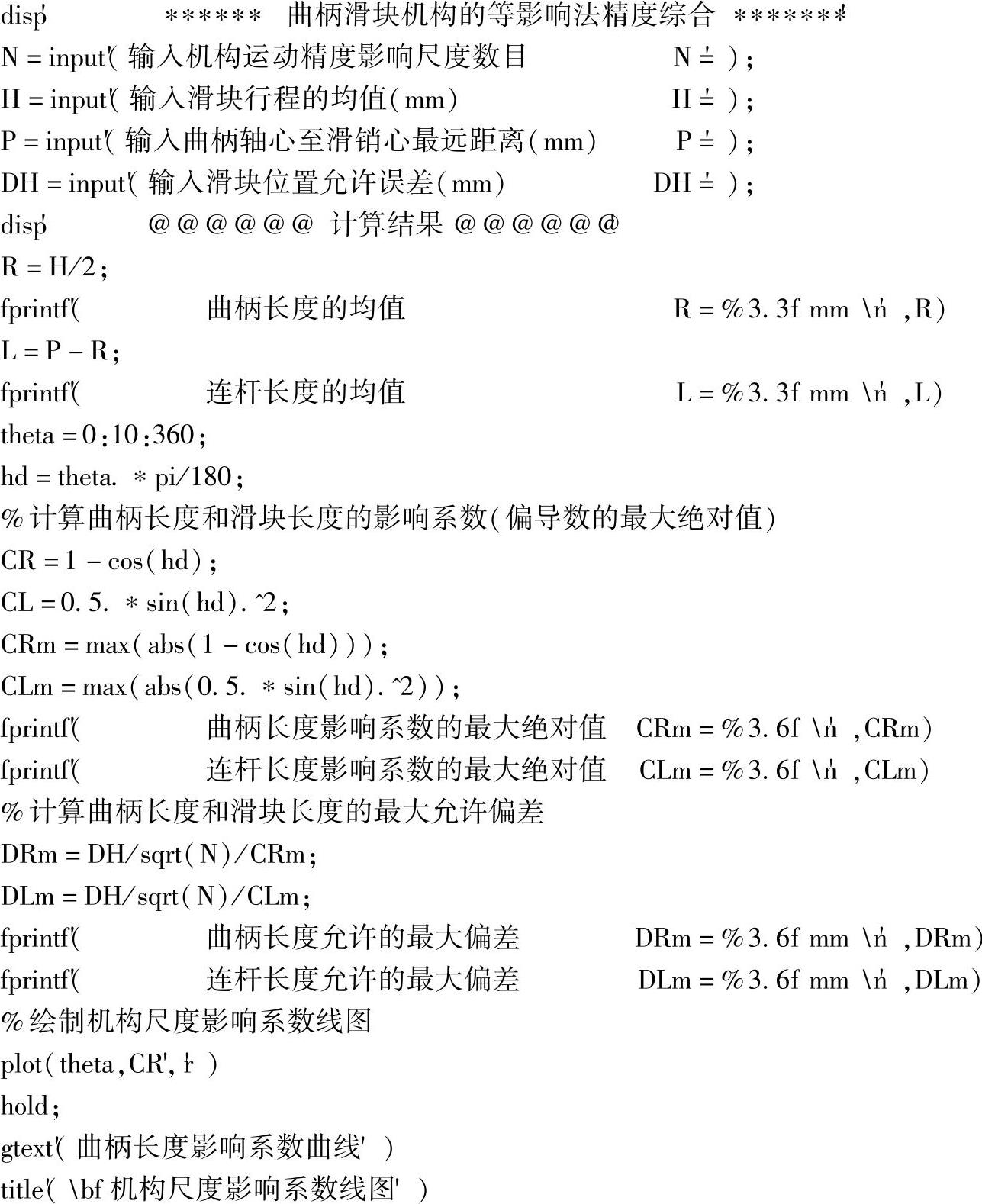
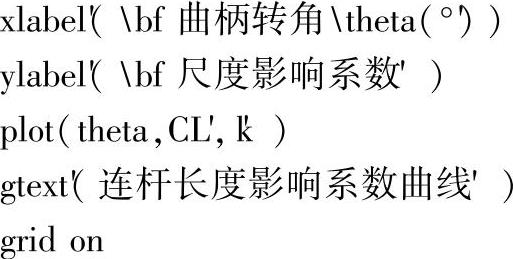
M文件运算结果:
绘制的机构尺度影响系数线图如图9-19所示。
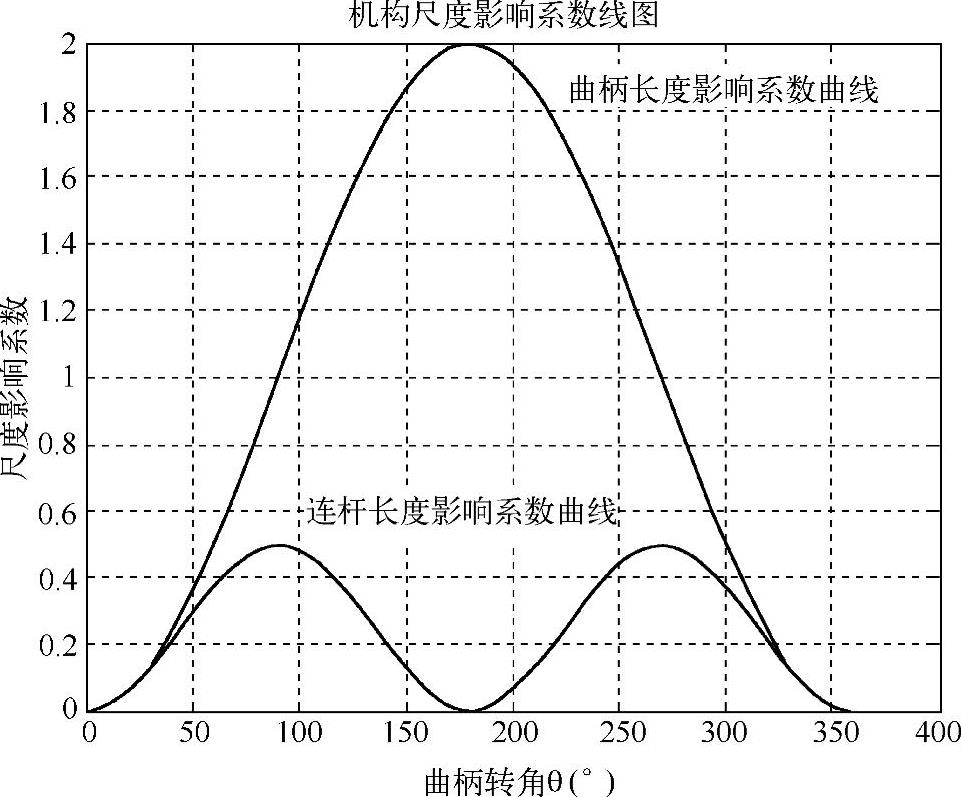
图9-19 机构尺度影响系数线图
综上所述,在已知曲柄滑块机构的构件长度参数以及制造偏差的条件下,通过对滑块的位移s、速度v和加速度a等运动参数进行均值和偏差的计算,可以确定各运动参数的变动范围。
在已知曲柄滑块机构的构件长度参数以及滑块运动位置允许误差条件下,通过计算机构尺度参数影响系数,按照等影响精度法,可以确定曲柄长度R和连杆长度L的允许的最大偏差△R和△L。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。