



如图9-10所示的转动导杆机构中,长度可以测量的构件是曲柄3和机架4,组成移动副的构件1和2的长度是不定的。由于构件长度l4<l3,则最短杆4上有两个周转副A与B。选取最短杆4作为机架,则周转副A与B都是固定铰链,连架杆1(转动导杆)和3(曲柄)都可以分别绕固定铰链B和A作整周转动,它们都可以分别作为机构的主动件。
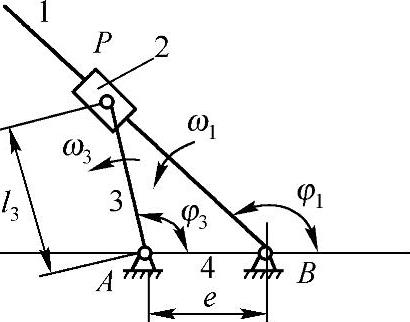
图9-10 转动导杆机构简图
转动导杆机构实现变速功能的机构是指主动件作匀速转动,从动件作变速运动,平均传动比为1,从而满足特定的工艺动作要求。如图9-11所示的插床插刀机构,主动件曲柄3绕轴A的整周匀速转动,通过转动导杆1和连杆5,驱动切削头6上固定的插刀,完成往复切削运动(切削行程较慢,回程较快)。如图9-12所示的轴心线不重合的联轴器机构,当带有导槽的盘1绕轴A转动时,通过圆盘3上的圆销带动圆盘3绕轴B转动,同时圆盘3上的圆销在盘1的导槽中滑动,从而带动导槽的盘1匀速转动,可以实现从动盘3的变速转动。当轴A和B的偏距e很小时,从动盘3的速度变化平缓。转动导杆机构在高速单张纸印刷机的输纸系统、回转柱塞泵、叶片泵和旋转式发动机等机器上也有应用。
1.机构从动件的角位移和角速度
(1)机构从动件的运动几何方程 如图9-10所示,取转动导杆机构的导杆1作为主动件,则φ1,是输入角;曲柄3是从动件φ3则,是输出角。在△APB中,∠LAP=φ1-φ3,应用三角形的正弦定理得到机构从动件的运动几何方程
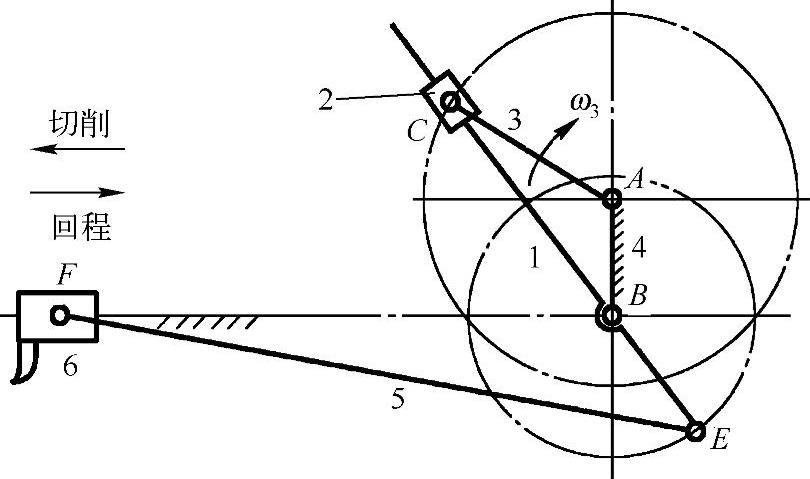
图9-11 插床插刀机构
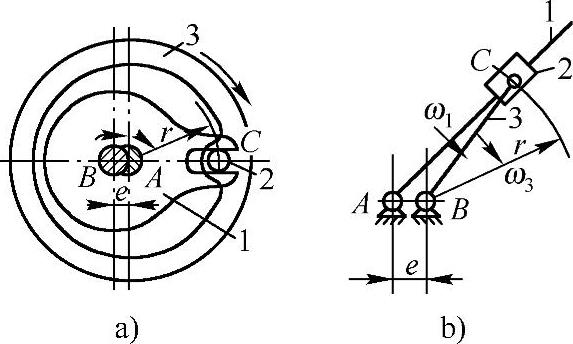
图9-12 轴心线不重合的联轴器机构

即 (9-22)
(9-22)
其中,e是固定铰链A和B的偏距,l3是曲柄长度。
(2)机构从动件的角位移和角速度方程 令机构尺度系数
 ,将机构尺度系数λ代入式(9-22),整理得到从动件曲柄3的角位移
,将机构尺度系数λ代入式(9-22),整理得到从动件曲柄3的角位移
φ3=φ1-asin(λsinφ1) (9-23)
再对式(9-22)求导,得到从动件曲柄3的角速度
 (https://www.xing528.com)
(https://www.xing528.com)
从动件角位移和角速度线图如图9-13所示。
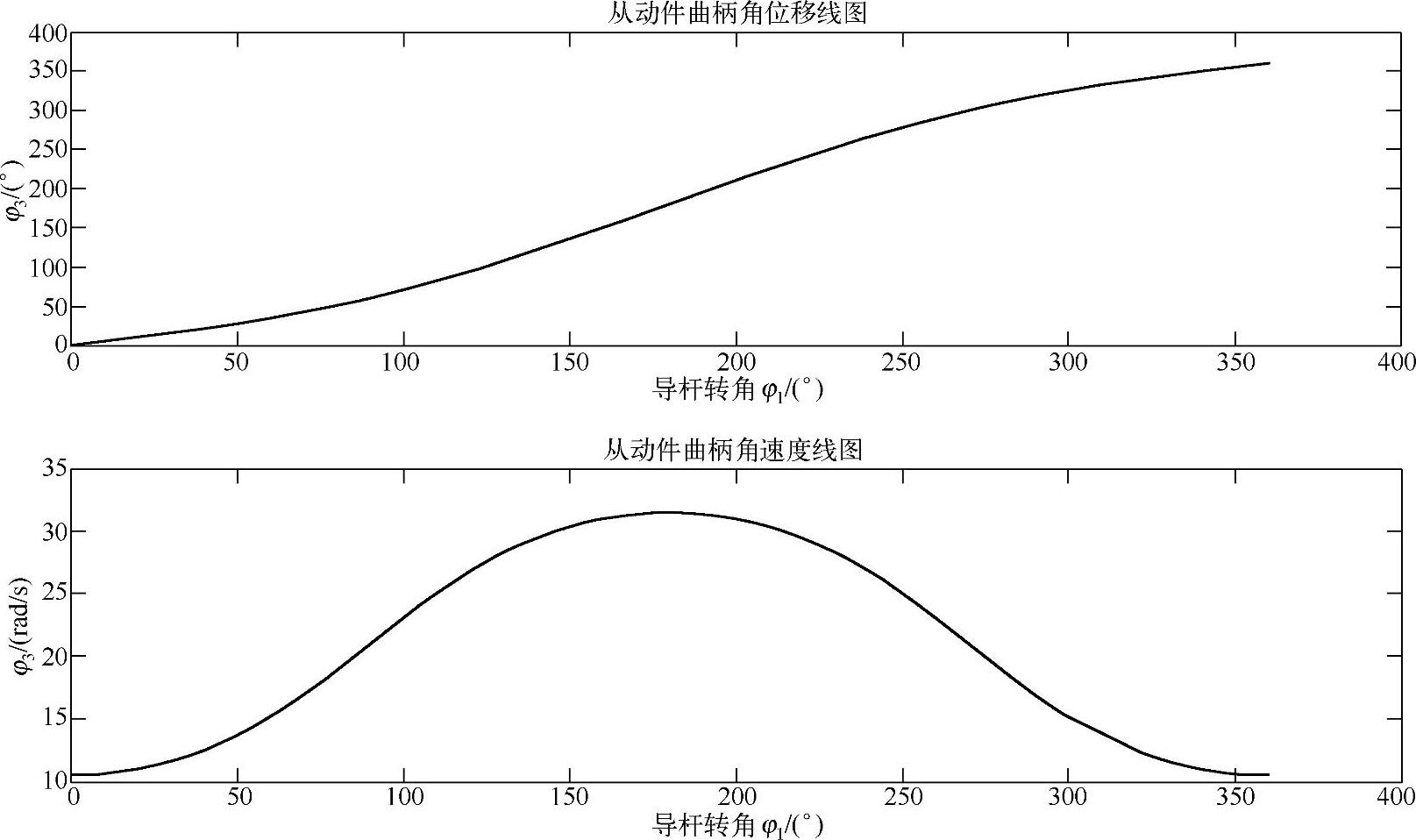
图9-13 从动件角位移和角速度线图
2.机构的压力角和传动比
(1)机构的压力角 在机构运动的任一瞬间,从动件曲柄3受到主动件导杆1通过滑块2施加作用力方向与导杆P点垂直,而从动件曲柄3的速度方向应该与它的转动半径PA垂直,它们两者之间所夹的锐角,就是机构等压力角。因而α=∠APB=φ1-φ3,根据sin ,得到机构压力角公式
,得到机构压力角公式

机构压力角线图如图9-14所示。机构压力角α随着主动件导杆1的角位移φ1的变动,按照正弦规律变化。
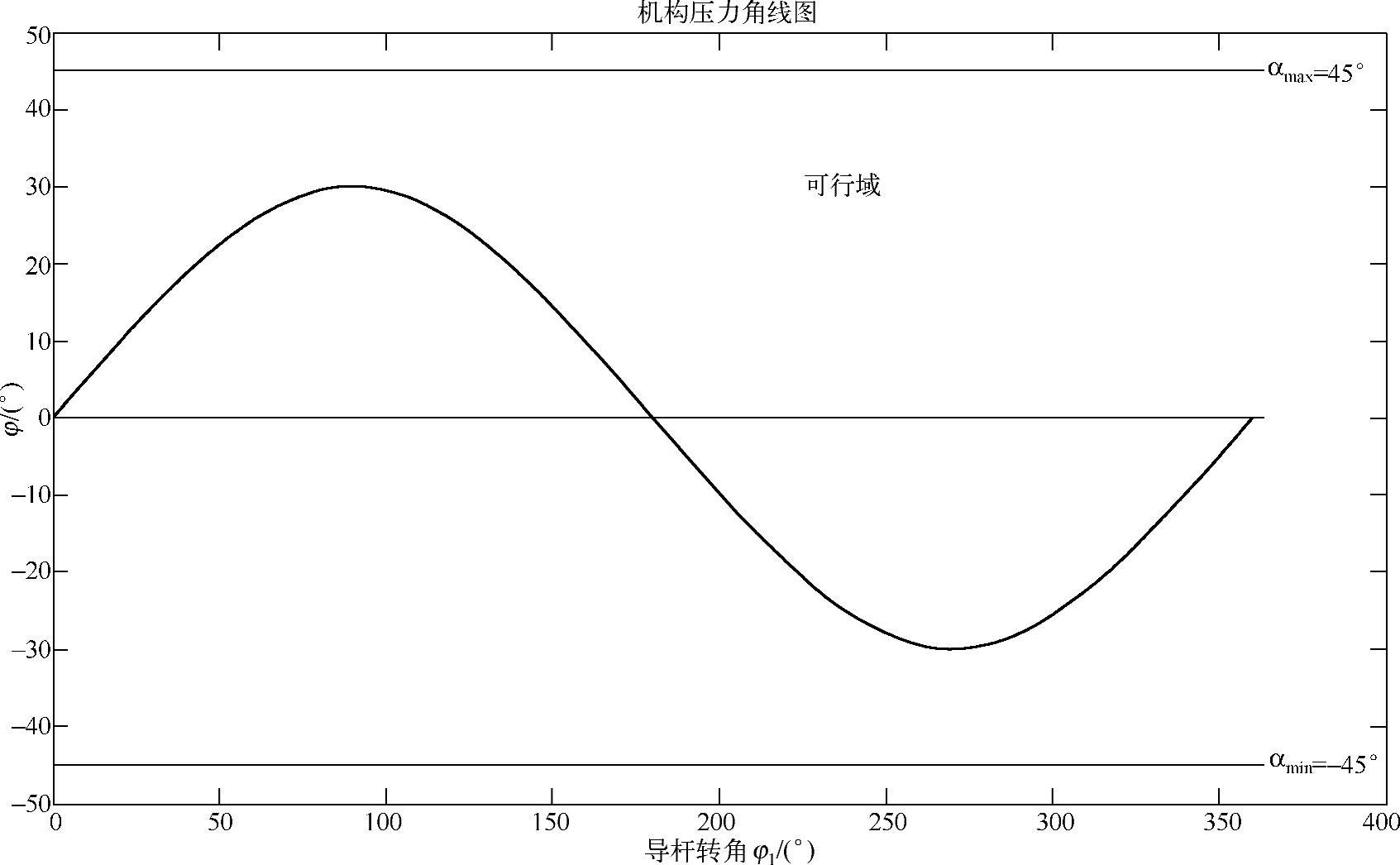
图9-14 转动导杆机构的压力角线图
为使机构具有良好的传力性能,应该使αmax≤45°。由于固定铰链B是周转副,即φ1∈[0,360°],就要求αmax≤asinλ,即机构的尺度系数 。
。
(2)机构的传动比 从动件曲柄3与主动件导杆1的传动比

当φ1=180°(主动件导杆1与机架BA反向共线)时,传动比i31max=1+λ,曲柄输出角速度ω3为最大;当φ1=0°(主动件导杆1与机架AB正向共线)时,传动比i31min=1-λ,曲柄输出角速度ω3为最小。
机构传动比是关于主动件导杆1的输入角和机构尺度系数λ的函数,即i31=f(φ1,λ)。当取尺度系数λ为定值时,传动比i31与主动件导杆1的输入角φ1的关系线图i31=f(φ1),如图9-15a所示。传动比i31max=1+λ和i31min=1-λ时,传动比i31与尺度系数λ的关系线图i31=f(λ),如图9-15b所示。
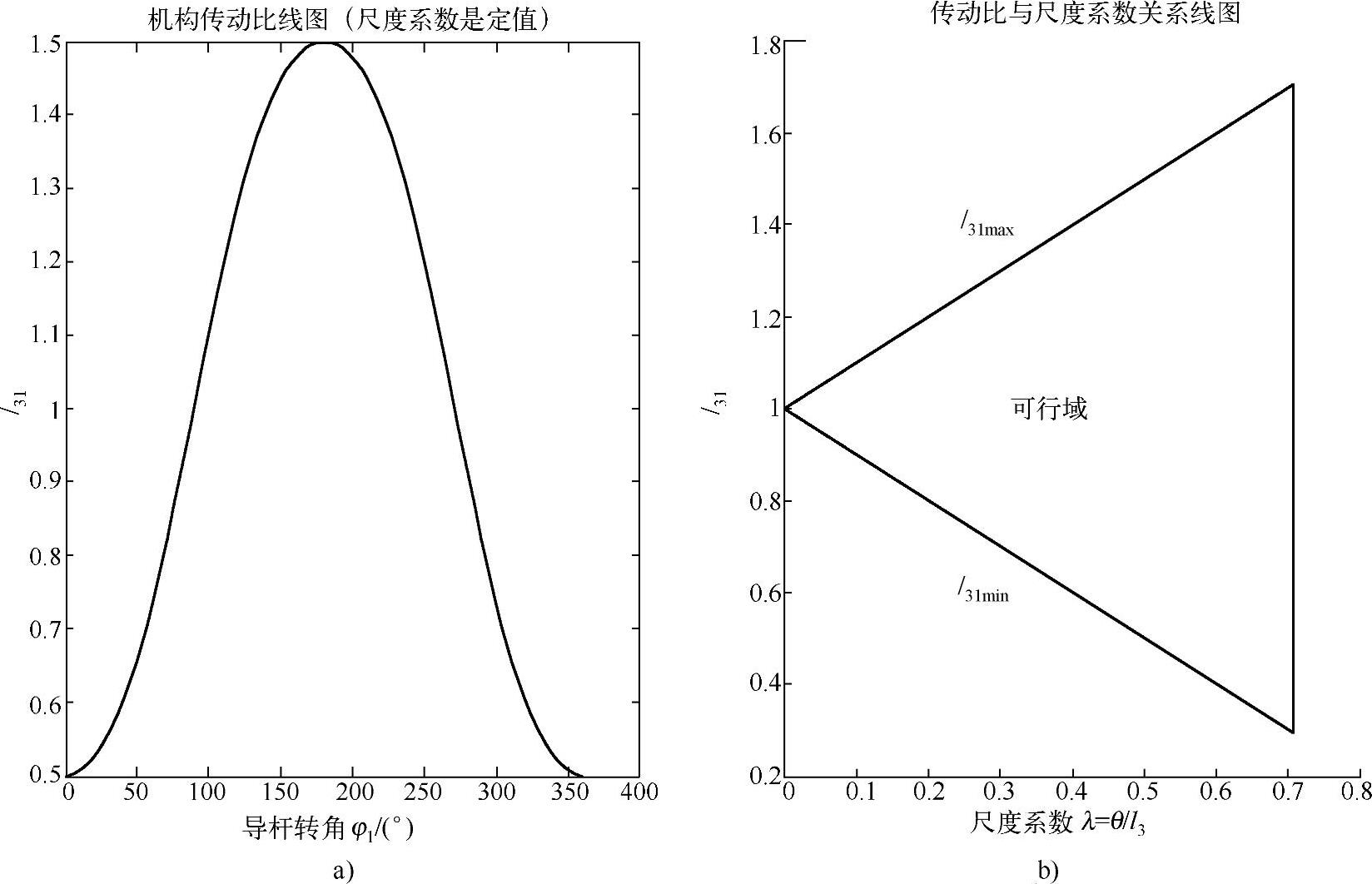
图9-15 机构传动比与导杆转角和尺度系数关系线图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。