



1.建立机构的位置方程式
在如图9-2所示的铰链四杆机构中,已知机构主动件AB与从动件CD之间的位置对应
关系ψ=f(φ),根据各个构件长度在直角坐标系中的投影,建立机构的位置方程式

将上式整理后得到机构的位置方程式
l22=l21+l23+l24+2l3l4cos(ψ+ψ0)-2l1l4cos(φ+φ0)-2l1l3cos[(φ-ψ)+(φ0-ψ0)] (9-4)
因为连架杆的运动取决于各个构件的相对长度,设机构的相对杆件长度系数为
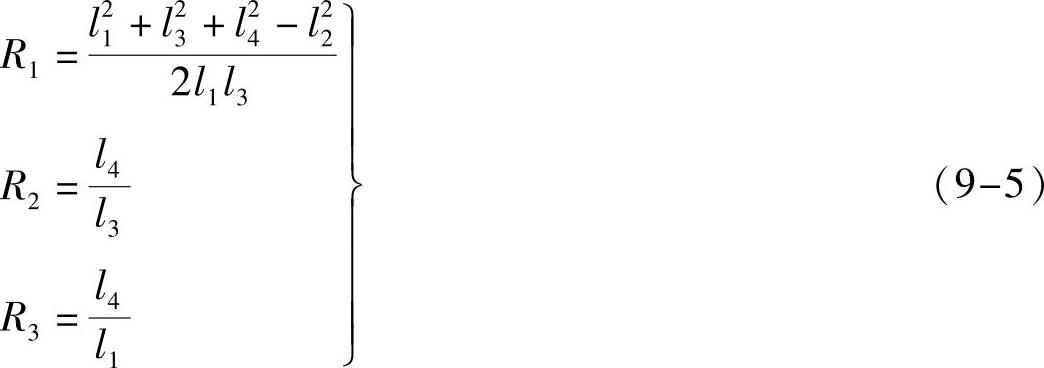
将它们代入机构的位置方程式(9-3),得到铰链四杆机构位置参数方程
R1-R2cos(φi+φ0)+R3cos(ψi+ψ0)=cos[(φi-ψi)+(φ0-ψ0)] (9-6)
当已知两连架杆的对应位置关系ψ=f(φ)时,式(9-6)中有R1、R2、R3、φ0和ψ05个参数,说明在四杆机构常规设计中,能够满足两连架杆的对应位置数最多为5组。
2.计算实例和数学模型
例9-2 已知铰链四杆机构两连架杆AB和CD的初始位置角φ0=ψ0=0°,它们三组对应位置是φ1=45°、ψ1=52°;φ2=90°、ψ2=82°;φ3=135°、ψ3=112°,机架的长度l4=50mm,要求设计该铰链四杆机构。
设计分析:将已知参数代入式(9-6),得到线性方程组(https://www.xing528.com)
R1-R2cos(φi+φ0)+R3cos(ψi+ψ0)=cos[(φi-ψi)+(φ0-ψ0)](i=1,2,3)
求解该线性方程组,得到机构的相对杆件长度系数R1、R2和R3,再代入式(9-5),计算出三个未知构件的长度
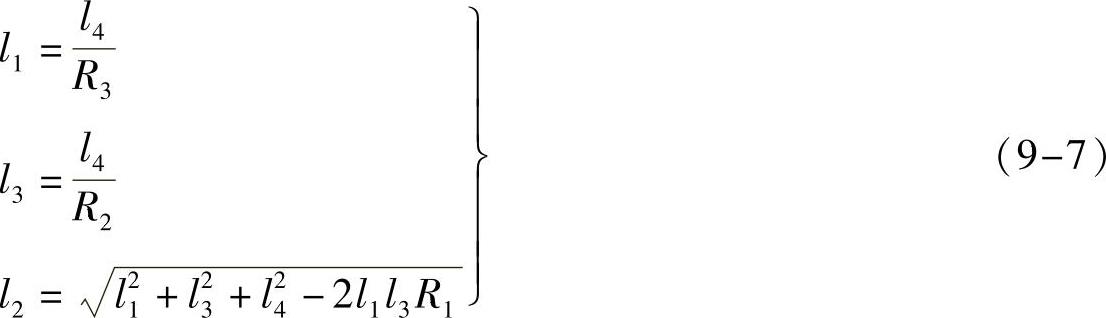
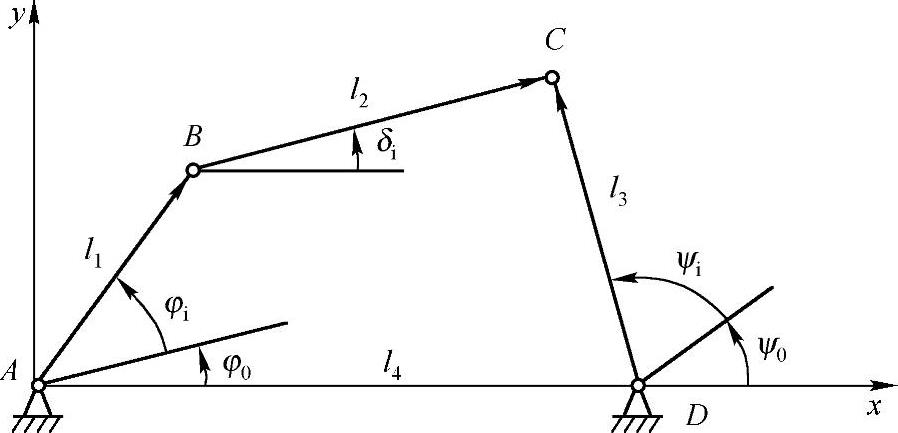
图9-2 铰链四杆机构连架杆的输入角和输出角
3.M文件和运算结果
在MATLAB平台上,首先输入已知数据:φ0、ψ0和[ψi,φi](i=1,2,3),建立线性方程组的系数矩阵[a]和[b];然后使用求逆函数inv或矩阵除法(运算符号“\”)求解线性方程组,直接求解出铰链四杆机构的杆长系数R1、R2和R3;输入已知的机架长度l4,按照式(9-7)计算出各杆长度。最后可以用求解矩阵或向量的范数的函数norm,检验计算结果的精度。
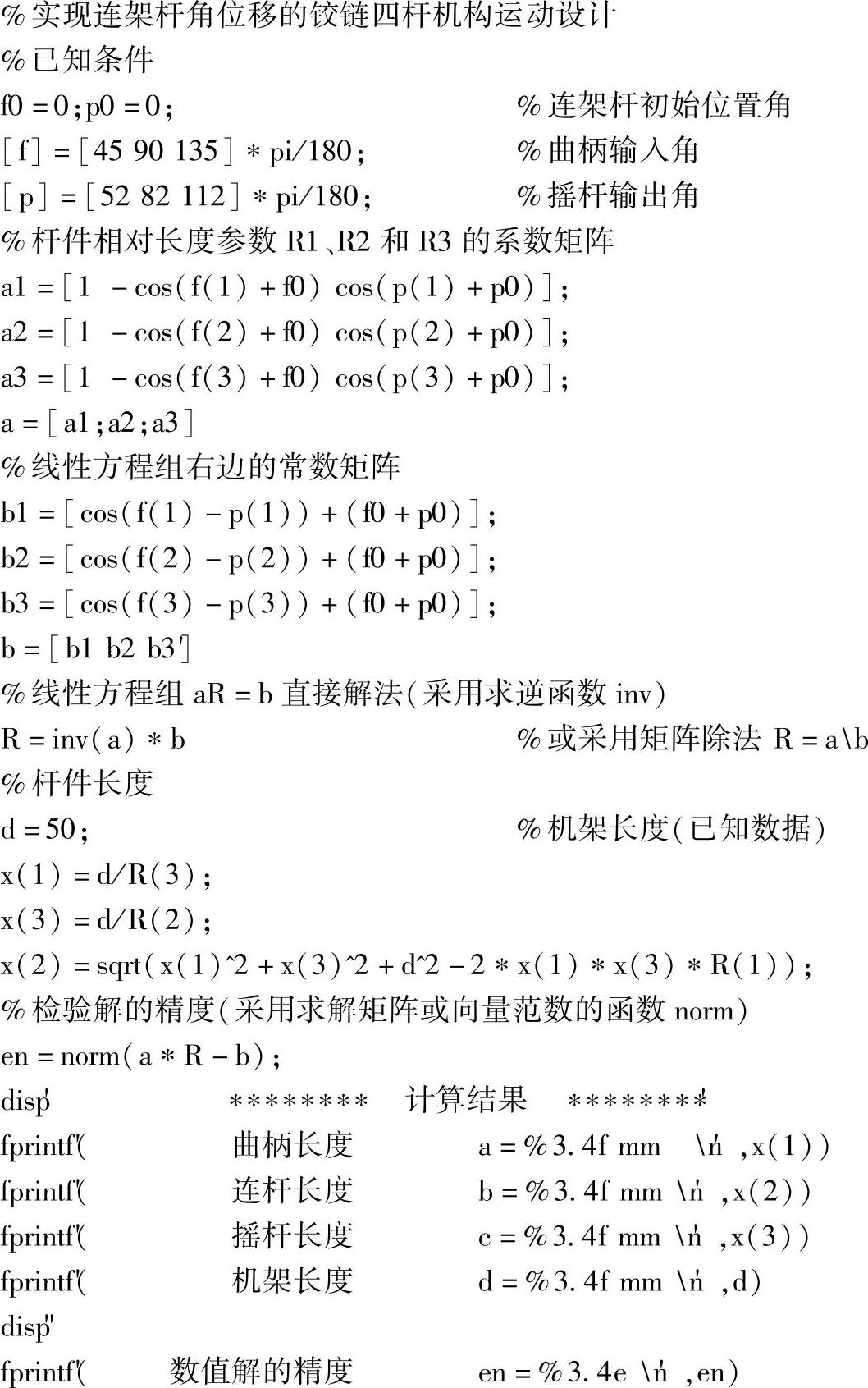
运算结果:
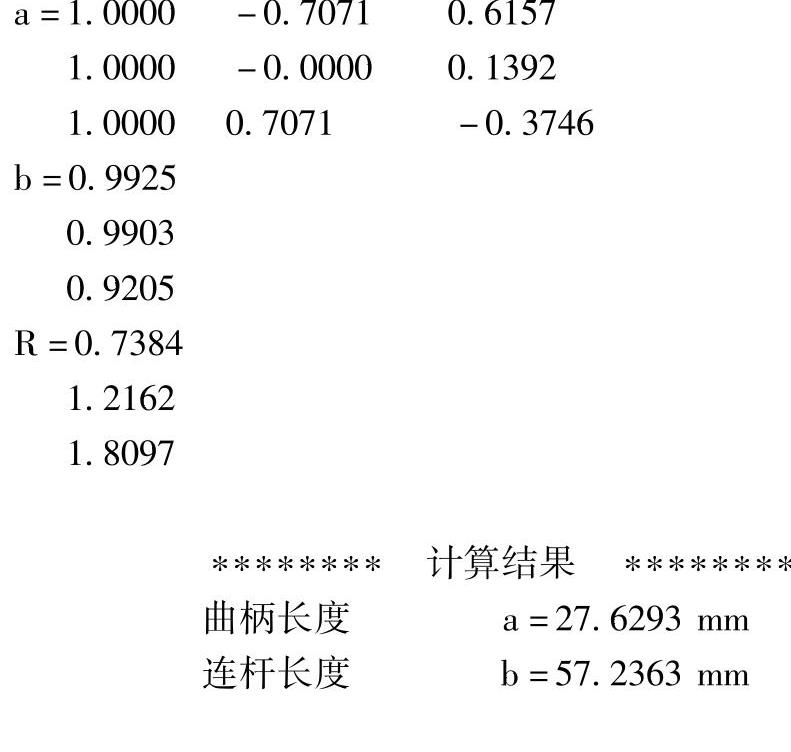
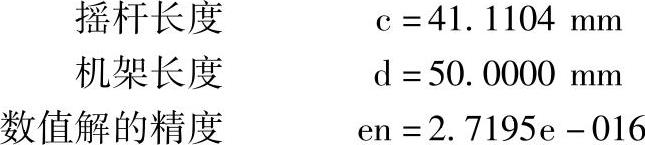
得到的计算结果是:曲柄长度l1=a=27.6293mm,连杆长度l2=b=57.2363mm,摇杆长度l3=c=41.1104mm,机架长度l4=d=50mm。
可见,采用求逆函数解线性方程组的误差是很小的,达到10-16数量级。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。