



【摘要】:图9-1 铰链四杆机构的极限位置和最小传动角2.计算实例和求解方法例9-1 试用解析综合法设计一个铰链四杆机构。在MATLAB平台上,首先参照式(9-1)建立描述铰链四杆机构运动的运动几何方程的函数文件;输入极位夹角θ、摇杆长度l3、摆角ψ和最小传动角γmin等已知数据,估计待求参数的初始值;然后使用非线性方程组的数值求解函数fsolve,可以方便地得到计算结果。
1.建立连杆机构的运动几何方程
铰链四杆机构如图9-1所示。设曲柄AB、连杆BC、摇杆CD和机架AD的长度分别为l1、l2、l3、l4,在机构两个极限位置和最小传动角位置组成的△AC1C2中,有如下几何关系

根据图9-1中所示四个三角形△AC1C2、△AC1D、△AC2D和△B′C′D及余弦定理得
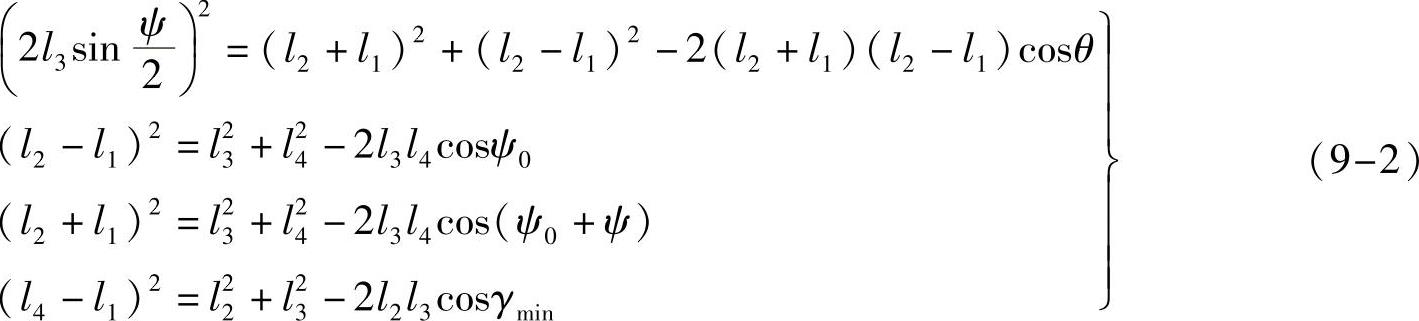
式(9-2表明了铰链四杆机构的运动几何关系,其中有8个参数。在已知四杆机构的极位夹角θ(或行程速度变化系数k)、摇杆长度L3和摆角ψ的条件下,再补充最小传动角γmin、曲柄长度l1、连杆长度l2、机架长度l4等结构参数中的某个辅助条件,就可以通过求解非线性方程组(9-2)得到其他未知杆件长度,以及机构在左极限位置时摇杆位置角ψ0。
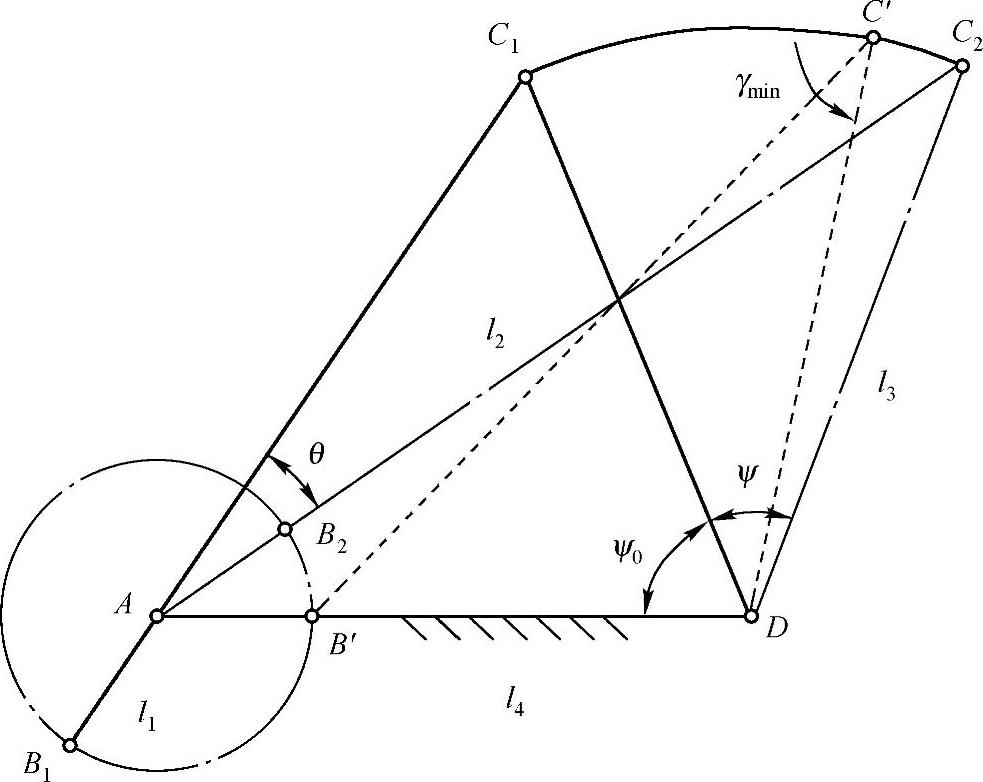
图9-1 铰链四杆机构的极限位置和最小传动角
2.计算实例和求解方法(https://www.xing528.com)
例9-1 试用解析综合法设计一个铰链四杆机构。已知机构行程速度变化系数k=1.25,摇杆CD的长度l3=250mm,摆角ψ=30°,要求机构的最小传动角γmin≥40°。
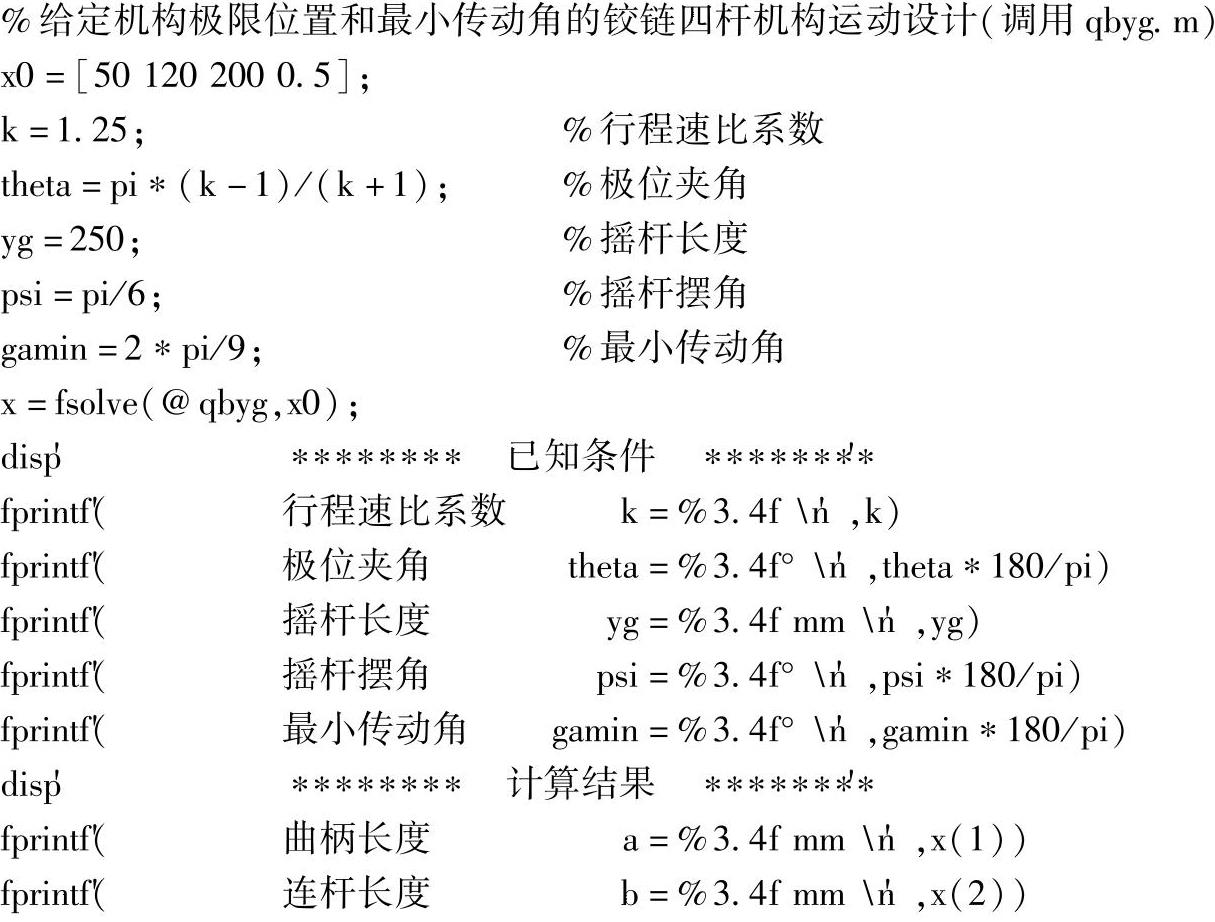
在MATLAB平台上,首先参照式(9-1)建立描述铰链四杆机构运动的运动几何方程的函数文件;输入极位夹角θ(根据行程速度变化系数k求出)、摇杆长度l3、摆角ψ和最小传动角γmin等已知数据,估计待求参数的初始值;然后使用非线性方程组的数值求解函数fsolve,可以方便地得到计算结果。
3.M文件和运算结果
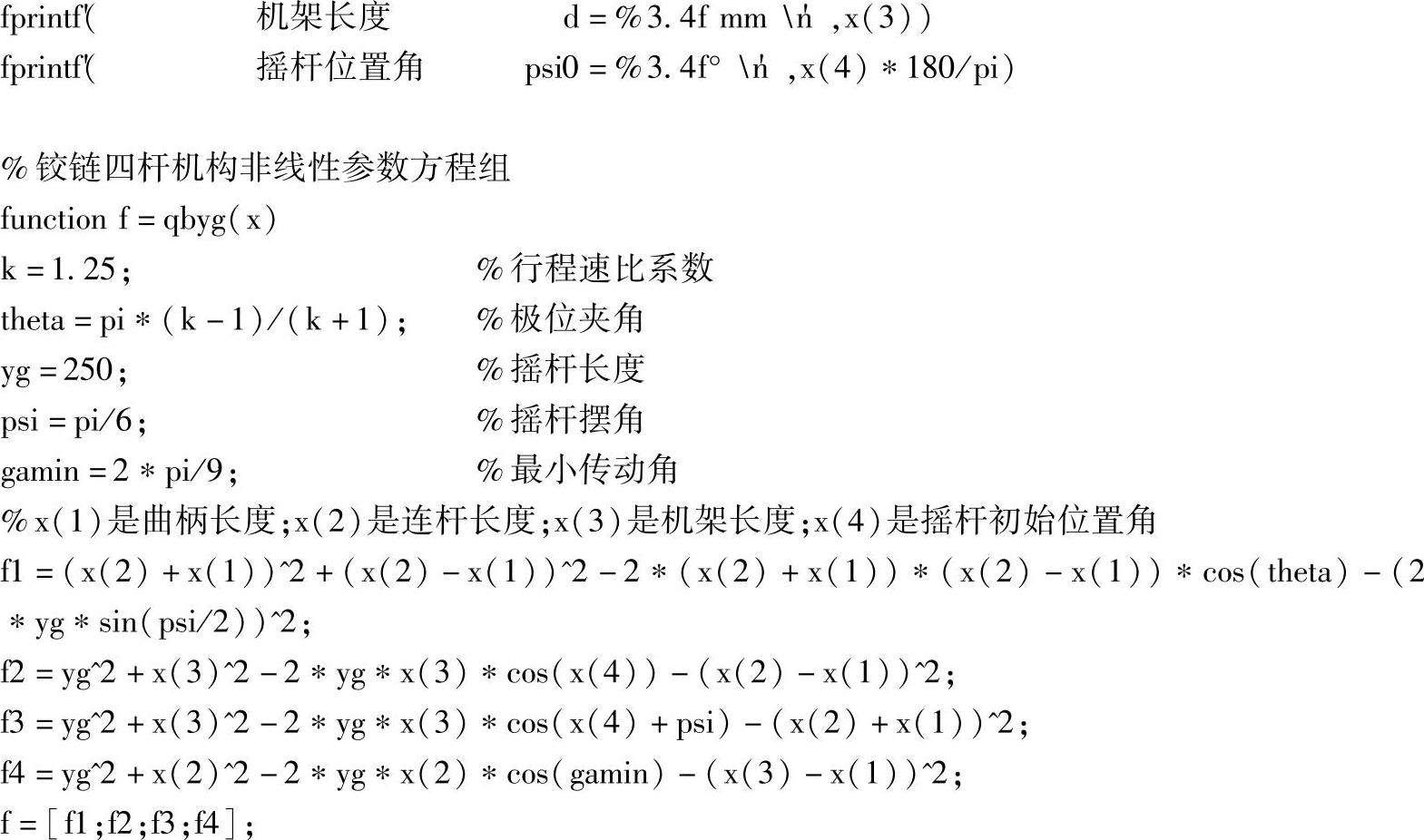
运算结果:
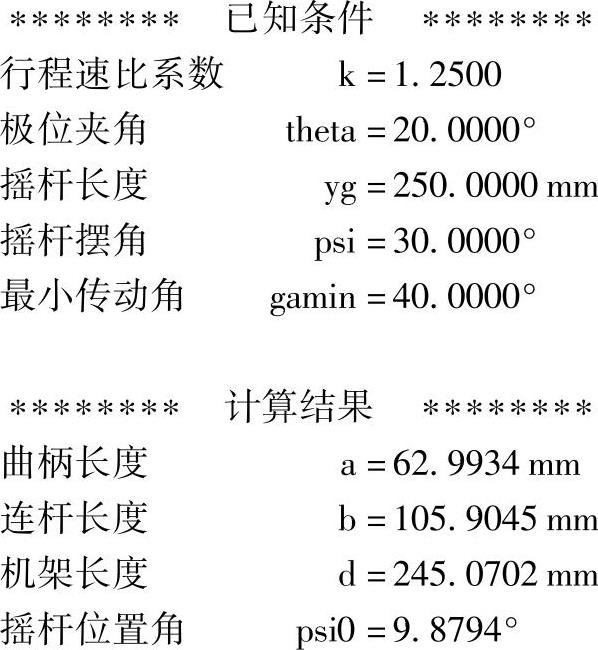
得到的计算结果是:曲柄长度l1=62.9934mm、连杆长度l2=105.9045mm、机架长度l4=245.0702mm,摇杆在左极限位置时的位置角ψ0=9.8794°。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。