



【摘要】:线性规划是数学规划中最简单和基本的问题,它主要用来解决在有限的资源条件下完成最多的任务,或是确定如何使用最少的资源统筹完成任务。线性规划的数学模型包括决策变量X、约束条件和目标函数三个要素,它的决策变量是非负的,而且约束函数和目标函数都是线性函数。例8-6 求解线性规划问题编制求解线性规划问题的M文件:由于线性规划问题中没有等式约束,所以相应的系数矩阵Aeq和常数向量beq用空矩阵符号“[]”表示。
线性规划(Linear Programming)是数学规划中最简单和基本的问题,它主要用来解决在有限的资源条件下完成最多的任务,或是确定如何使用最少的资源统筹完成任务。
线性规划的数学模型包括决策变量X、约束条件和目标函数三个要素,它的决策变量是非负的,而且约束函数和目标函数都是线性函数。
线性规划的数学模型表示为:
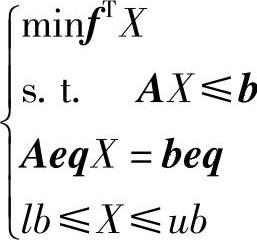
用于求解线性规划的MATLAB函数是linprog,其调用格式为:
[xopt,fopt]=linprog(f,A,b,Aeq,beq,lb,ub,x0,options)
其中,输入参数有:
● f是目标函数各维变量的系数向量。
● A和b分别是不等式约束函数的系数矩阵和常数向量。
● Aeq和beq分别是等式约束函数的系数矩阵和常数向量。
● lb和ub分别是设计变量的下限和上限。
● x0是初始点。
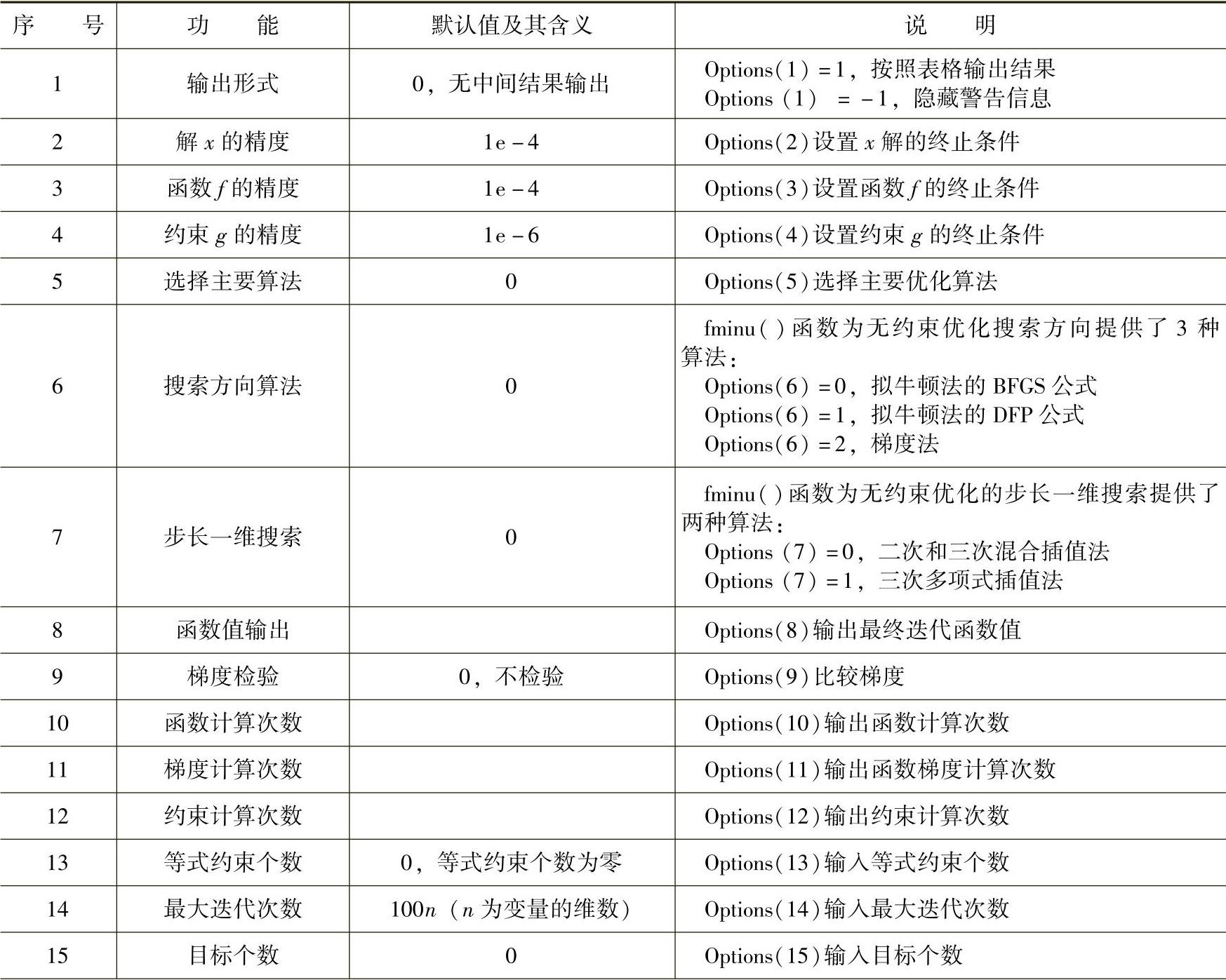
● options是设置优化选项参数,见表8-1。
输出参数有:xopt和fopt分别是返回目标函数的最优解及其函数值。(https://www.xing528.com)
例8-6 求解线性规划问题
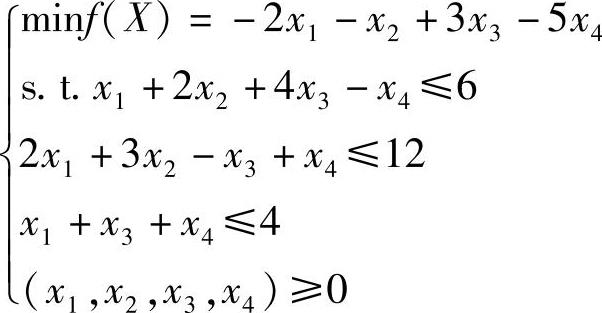
编制求解线性规划问题的M文件:

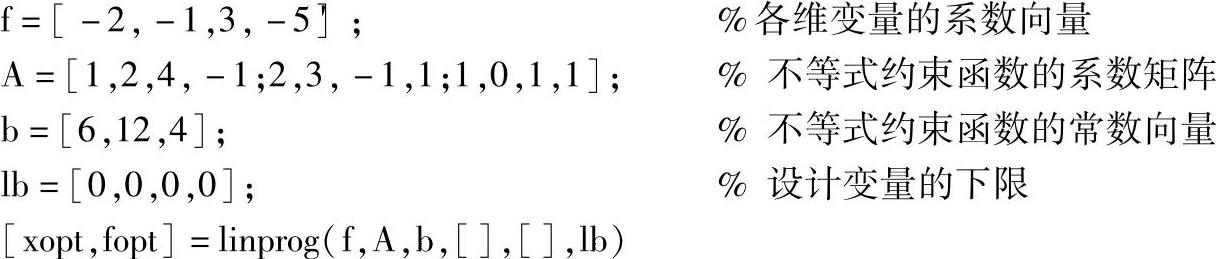
由于线性规划问题中没有等式约束,所以相应的系数矩阵Aeq和常数向量beq用空矩阵符号“[]”表示。程序运行结果:
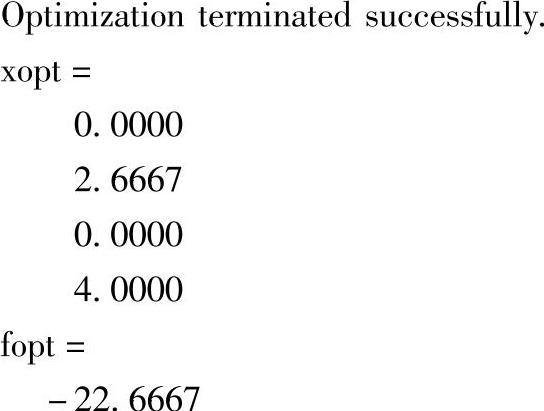
可见,约束最优解位于两个边界约束x1≥0和x3≥0的交集上。
表8-1 控制参数Options
(续)

免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。