



倍极比双速电动机的两种磁极对数是呈倍数关系,例如:2/4极、4/8极等。此类双速电动机的定子绕组用反向法进行调制最方便。具体调制步骤方法如下:
1)选基准极。通常选少数极为基准极,采用显极接法。这样少数极的绕组每相在一个极下所占的槽数应为 ,按电角度计,每相在一个极下则占
,按电角度计,每相在一个极下则占 电角度,俗称60°相带。当将这种绕组改为庶极接法后,即可获得倍数极(多数极),多数极为120°相带。
电角度,俗称60°相带。当将这种绕组改为庶极接法后,即可获得倍数极(多数极),多数极为120°相带。
2)分别画出基准极和多数极的槽矢量星形图,并在图上标出槽号。
3)按照反向法的原则来标出各槽的相号。即先标基准极的相号,后面标注多数极各槽相号时必须和基准极的相号一样。
4)选定三个相矢量方向,据此确定各槽相号的正负。取定相矢量方向时,必须要使三个相矢量对称,再就是由此决定的每相各槽的正负号尽可能按组连号,以便绕制线圈并易于嵌放。各槽相号的正负号可根据它与所选定的本相矢量交角的大小来决定,交角小于90°的为正;交角大于90°的为负。
5)检查各极下三相是否对称,如不对称应重新考虑排列方案。
6)列出两种极下全部绕组的排列表。
7)计算绕组系数,以分析排列后的绕组性能优劣。
在槽矢量星形图上求分布系数Kd,方法是,将一相所属全部槽矢量加起来得出其矢量和,然后将矢量和除以本相槽矢量的算术和(单个矢量值×矢量数),即得出分布系数Kd。即

短距系数: 或
或
式中,γ为一个线圈的节距较之整距所短(或所长)的电角度。
节距的确定:为照顾多数极的出力,倍极比双速电动机绕组节距常取接近或等于多极数的整距。
这样,KW=Kd·Ky
【例4-13】 用反向法排列Q=36槽、4/8极单绕组双速电动机的绕组排列方案。
解:1)选4极作为基准极,绘出4极槽矢量星形图并标出相号,如图4-29所示。
其中每槽电角度:

2)画出8极时的槽矢量星形图在各矢量上标出槽号。每槽电角度:

对照4极时各槽矢量的相号在8极槽矢量图上标出相号。如图4-30所示。
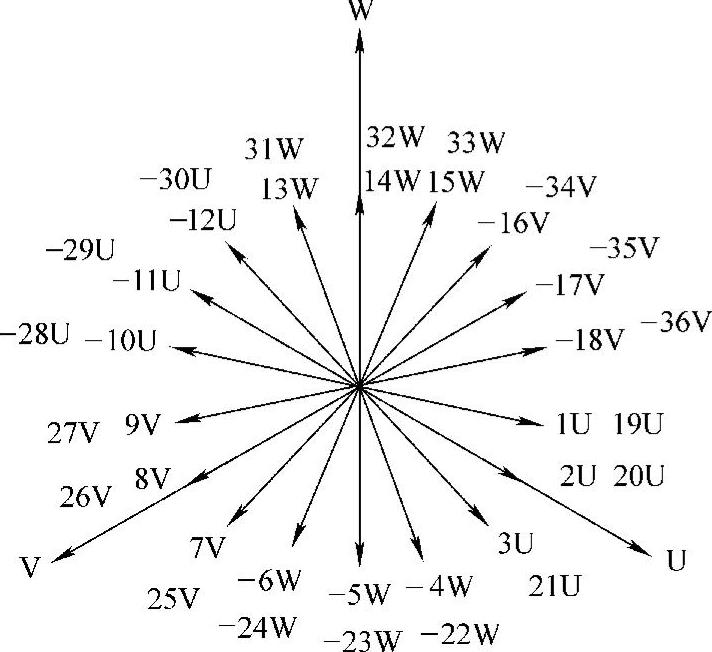
图4-29 4极36槽槽矢量星形图
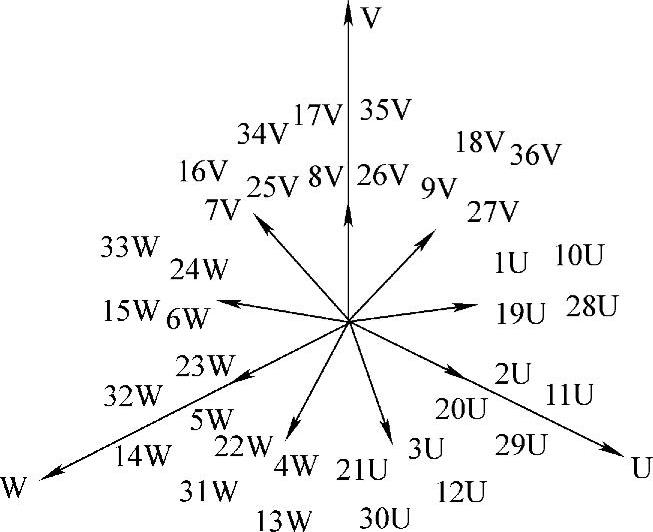
图4-30 8极36槽槽矢量星形图
3)选定8极槽矢量星形图上的三个矢量方向。通过观察分析图4-30,显然U相矢量应选在槽2、11、20、29方向;V相矢量选在槽8、17、26、35方向;W相矢量选择在槽5、14、23、32方向。由于各相所属全部槽矢量与相矢量之间的交角都小于90°,故全部槽的相号都为正。(https://www.xing528.com)
4)检查4、8极下的三相矢量都满足对称要求。而且,两种磁极数下的三相矢量相序相反(4极时U、V、W为顺时针方向排列;8极时U、V、W则为逆时针方向排列)表明这种排列为“反转向方案”。若使用场合要求两种极数的转向相同,只要在8极控制线路中将三根电源线中的任意两根同时对调即可。
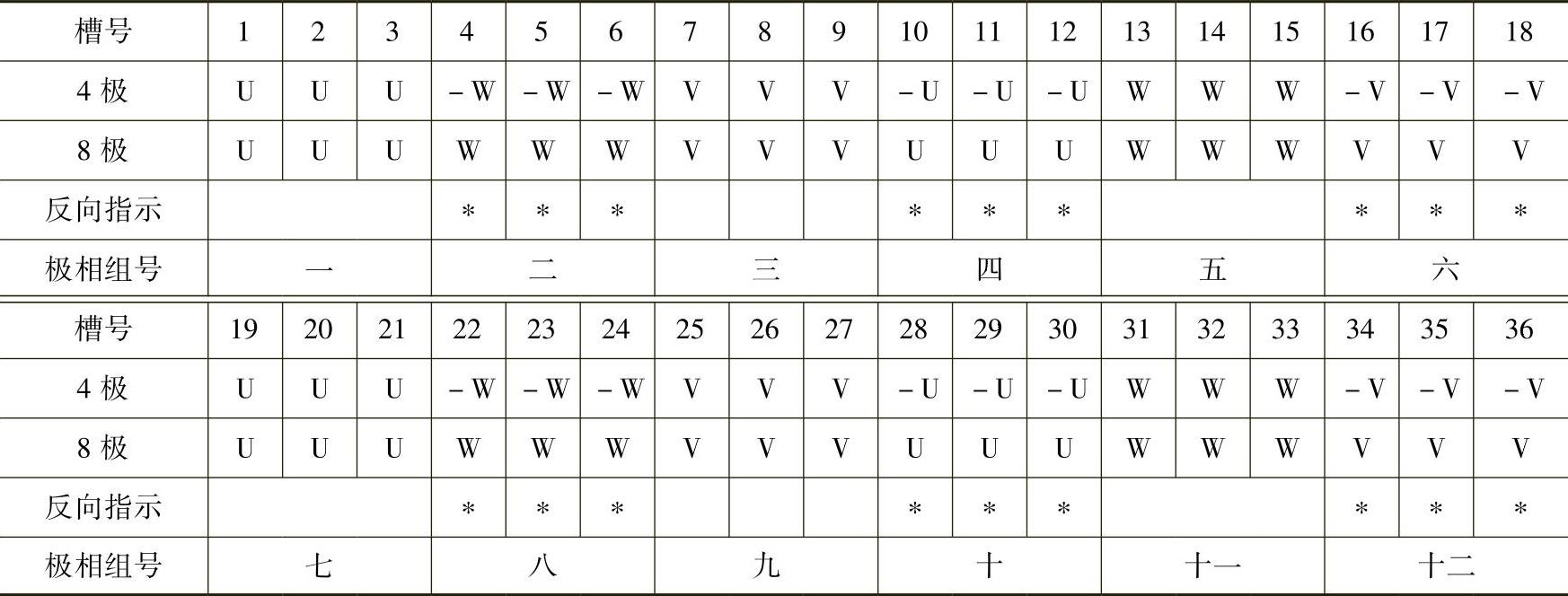
5)列出两种极数下全部绕组的排列表,见表4-18。表中的*号表示该槽导线(或线圈)在变极时电流反向。从表4-18中可清楚看出,无论三相中的哪一相,变极时都有一半线圈电流反向。这和前面变极原理所述结论一致。
表4-18 36槽4/8极双速电动机绕组排列表
6)绕组的嵌绕和接线对多速电动机大多按双层叠绕组嵌放。对本例,按多数极8极选取线圈节距: (长距)
(长距)
从表4-15中可看到,每三个槽号为同相且方向一致,取三个线圈连绕为一个极相组,全台共12个极相组。其匝数节距(y=1—6)完全相同。根据电动机的使用场合可选2 /
/ (恒功率)或2
(恒功率)或2 /△(恒转矩)接线方法,均能满足表4-2中的要求。本例取2
/△(恒转矩)接线方法,均能满足表4-2中的要求。本例取2 /
/ 和2
和2 /△两种接线,其绕组展开图(简便画法)如图4-31所示。其圆形简化接线图如图4-32所示。
/△两种接线,其绕组展开图(简便画法)如图4-31所示。其圆形简化接线图如图4-32所示。
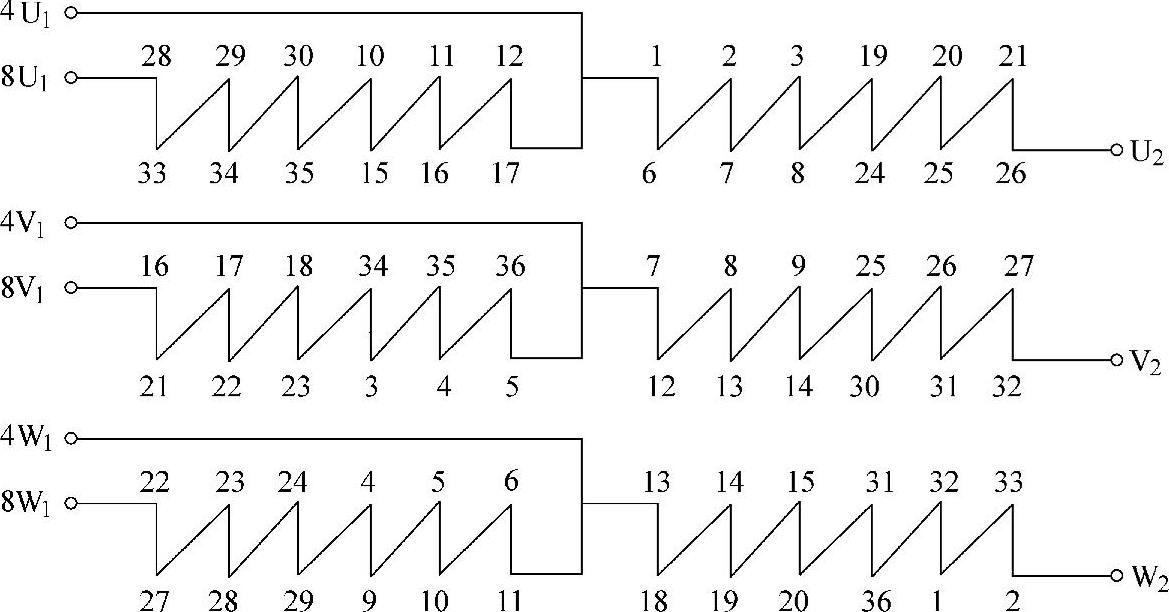
图4-31 4/8极36槽绕组展开图(简便画法)
7)计算绕组系数。本例中,4极和8极一相(U相)所有槽矢量如图4-33所示。为简单计,规定每根槽矢量数值为1,它们共有三个方向,每个方向槽矢量值为4,一相共有12个槽矢量。
这样,4极时的分布系数:

8极时的分布系数:

因y=5,4极时,较其极距(τ=9)短4槽,相当20°×4=80°。8极时,较其极距(τ=4.5)长0.5槽,相当于40°×0.5=20°,所以
绕组系数:
4极时,KW4=Kd4·Ky4=0.96×0.766=0.735
8极时,KW8=Kd8·Ky8=0.844×0.985=0.831
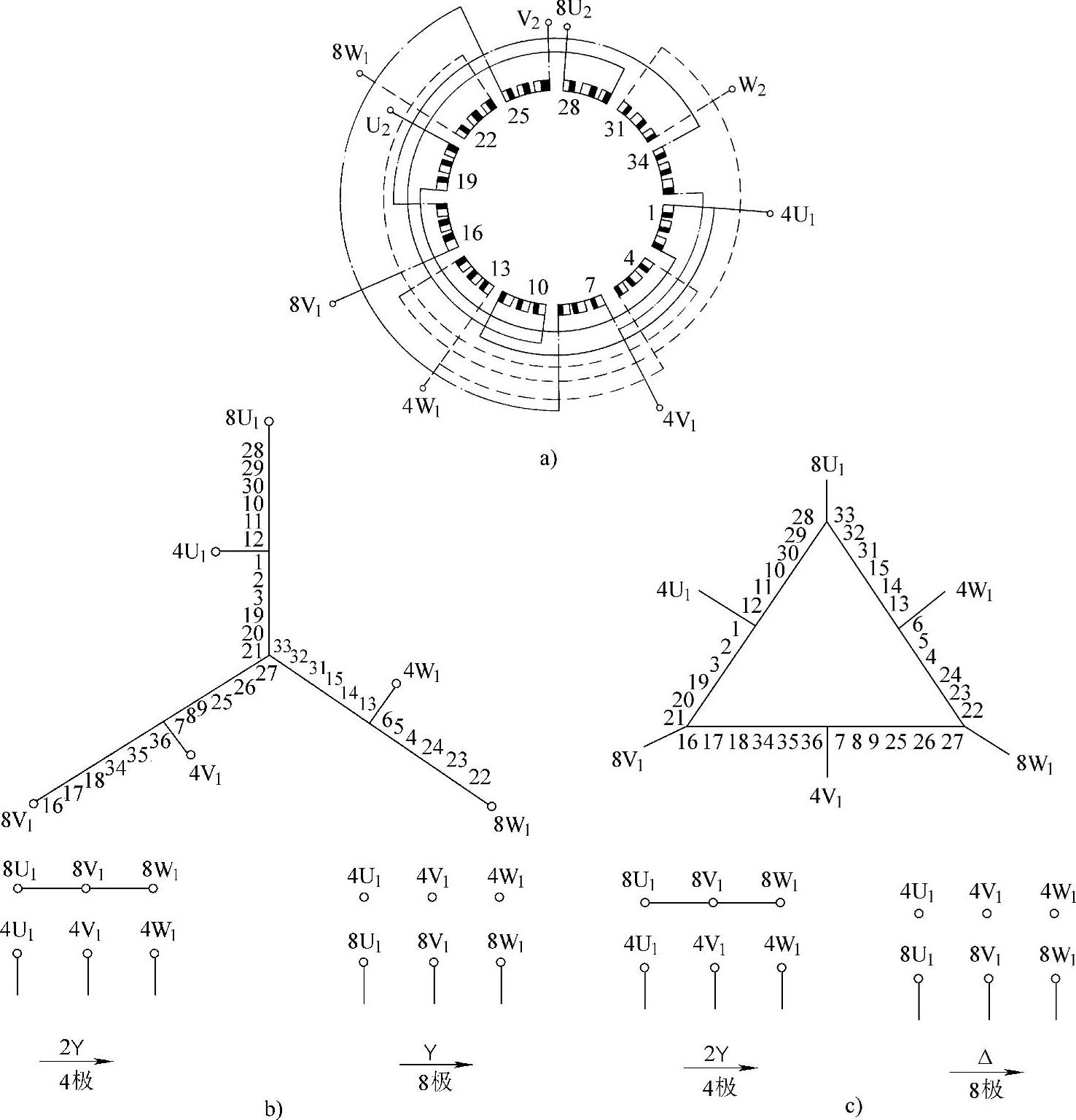
图4-32 4/8极36槽绕组圆形简化接线图
a)简化接线图 b)2 /
/ 联结法 c)2
联结法 c)2 /△联结法
/△联结法
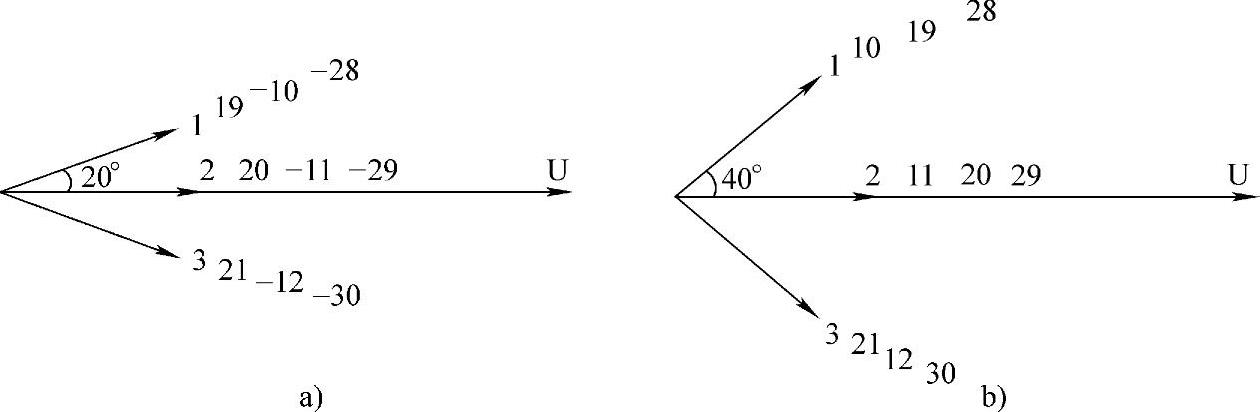
图4-33 U相所有槽矢量图
两种磁极数下绕组系数如果越接近,电动机在两种转速下运行时出力越接近。所以选择节距及分布情况时,一定要兼顾到这些。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。